 基于激光雷達和視覺融合的機器人SLAM應用研究
基于激光雷達和視覺融合的機器人SLAM應用研究

摘 要 :通過研究激光雷達和視覺傳感器融合 SLAM,實現雙目視覺傳感器對單線激光雷達點云的補充,以提高建圖精度。實現方案以 2D 激光雷達點云數據為主,雙目視覺傳感器作為激光雷達點云盲區的補充,搭建 SLAM實驗平臺,完成機器人實時地圖構建并獲取當前位置信息,同時降低攜帶傳感器的成本。
0 引 言
隨著機器人技術的發展,越來越多的機器人已經實現自主運動,但可靠性和制作成本依然制約著機器人的普及。通過使用相較3D激光雷達傳感器成本更低的2D激光雷達和視覺傳感器進行點云數據融合,實現平臺搭建,優化機器人的SLAM技術,解決當前2D激光雷達存在的感知單一平面點云數據不足、視覺傳感器數據計算量大等問題[1-2],提升地圖精度,減少SLAM應用過程中的不確定性。
1 實驗平臺搭建
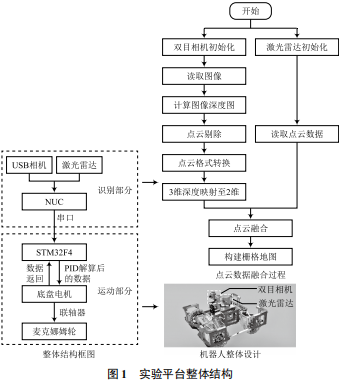
研究基于ROS構建由2D激光雷達和深度相機點云融合的SLAM[3]平臺,通過NVIDIA Jetson TX2運算平臺和STM32微控制器通信傳送數據,實現機器人自主運動。實驗平臺包括點云數據識別部分和運動部分,整體結構如圖1所示。
云數據識別部分包括激光雷達獲取平面點云數據和雙目相機深度點云計算。運行時激光雷達獲取2D平面內障礙物點云信息,雙目相機獲取機器人正面范圍的影像[4],通過Stereo Matching 計算可視范圍內的深度點云數據,并對其進行范圍剔除和距離篩選 ;最后將雙目相機獲得的點云與激光雷達點云序列進行比較更新,融合點云數據后根據占據柵格地圖算法構建地圖[5]。點云數據融合過程如圖1所示。
運動部分通過單片機STM32F4從NUC獲取運動速度向量或從遙控中獲取控制信息,經PID解算將電流或電壓值發送給底盤電機,電機連接聯軸器帶動麥克納姆輪轉動,從而實現全方向移動[6]。機器人整體設計如圖1所示。
2 研究與測試
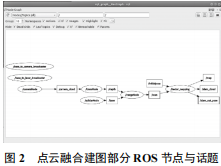
圍繞ROS節點話題進行研究和測試。雙目相機點云生成節點(cameraNode),將相機點云(/camera_cloud)傳送給點云數據處理節點(/transNode)處理,得到深度數據(/depth);激光雷達點云生成節點,得到點云數據(/laser),二者由點云合成節點(/mergeNode)融合得到點云數據(/scan),再將其輸出到 HectorMapping 的節點。點云融合建圖部分 ROS 節點與話題如圖2 所示 [7]。
2.1 雙目校正與像素匹配
使用金乾象工業相機中的兩個自制雙目深度相機,需要保證左右畫面的同步和亮度,否則會導致深度圖的計算結果不佳。因此,在相機點云生成(/camera_cloud)之前,需要對左右相機讀取的原圖像進行雙目校正和像素匹配。
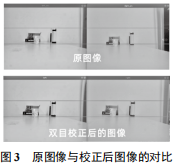
雙目校正根據攝像頭標定后獲得的單目內參(焦距、成像原點、畸變系數)和雙目相對位置關系(旋轉矩陣和平移向量),分別對左右視圖進行消除畸變和行對準,使得左右視圖的成像原點坐標一致、攝像頭光軸與對極線行對齊。原圖像與校正后圖像對比情況如圖3所示。
像素匹配通過匹配代價計算、代價聚合、視差計算和視差優化等步驟 [8],對左右視圖上對應的像素點進行匹配得到視差圖。依靠視差圖,結合雙目相機的內參,計算得到正交空間下的點云數據。
2.2 點云數據處理
由于雙目相機參數的差異,幀速率不能完全同步,獲取的點云數據存在一定誤差,需要先通過點云數據處理節點(/transNode)變換和剔除數據,再通過點云合成節點(/mergeNode)融合同種格式的數據。
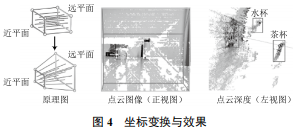
正交空間下的點云通過透視除法的逆變換得到相機空間下的點云數據,獲得相對于相機實際位置的坐標。坐標變換與效果如圖4所示。
數據轉換部分將點云投影到二維平面,并轉換為激光雷達點云格式的數據,即角度和對應方向的深度值[9]。轉換時,通過反正切函數,根據點云位置的水平偏移與深度值計算出角度和距離值,篩選取得各個角度上距離最近的點云,效果如圖5所示。在融合點云之前,應當剔除視錐內不需要的部分,效果如圖5中截取點云后的投影圖所示 ;否則地面和天花板將對投影后的點云造成影響,效果如圖5中的原點云投影圖所示。考慮到雙目左右圖像的邊緣缺少完整的匹配信息,點云可能出現極不穩定的深度值,效果如圖5中未進行邊緣剔除的投影圖所示。因此,在能夠反映完整深度值的情況下,剔除部分邊緣深度值,效果如圖5中邊緣剔除后的投影圖所示。

2.3 點云融合建圖
點云合成節點將深度數據和激光雷達點云數據融合,并篩選出各個角度距離最近的點云輸出到 HectorMapping 的節點。
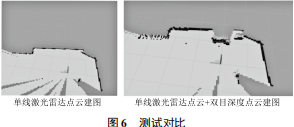
經過測試,增加雙目相機后的建圖能夠獲取單線雷達掃描平面外的細節,自身位姿估計和建圖結果更加精確,測試對比結果如圖6所示。但與工業級產品相比穩定性差,建圖過程中會有微小偏差。
3 結 語
本文通過激光雷達提供大范圍點云信息,視覺傳感器提供機器人正面區域補充激光雷達缺失的點云,較單線雷達大范圍稀疏點云提高了計算準確度,使用Hector SLAM算法融合點云數據,更好地實現機器人點云獲取和建圖[10]。
審核編輯 :李倩
-
機器人
+關注
關注
213文章
31079瀏覽量
222227 -
雷達
+關注
關注
52文章
3328瀏覽量
123889 -
視覺傳感器
+關注
關注
3文章
276瀏覽量
23868 -
激光雷達
+關注
關注
979文章
4470瀏覽量
196521
原文標題:論文速覽 | 基于激光雷達和視覺融合的機器人 SLAM 應用研究
文章出處:【微信號:iotmag,微信公眾號:iotmag】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄

禾賽科技2025年割草機器人3D激光雷達出貨量第一
什么是激光雷達 3D SLAM技術?

新華網:國產激光雷達爆單!銷售額猛增近100%,訂單排到年底

德州儀器加速激光雷達在機器人中的應用

禾賽科技榮獲中國割草機器人行業激光雷達引領者認證
AGV/AMR機器人單線激光雷達選型指南

詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
【「# ROS 2智能機器人開發實踐」閱讀體驗】+ROS2應用案例
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
LD Gen2 Lite激光雷達:賦予機器人 “感知力” 的關鍵
一徑科技NZ1全場景廣角3D激光雷達,面向泛機器人應用場景

速騰聚創第100萬臺激光雷達下線,用于人形機器人?
洛微科技參與起草《機器人用激光雷達通用技術條件》標準正式發布



 工商網監
工商網監
評論