") 基于ROS 2的安全認(rèn)證軟件框架
基于ROS 2的安全認(rèn)證軟件框架


編輯:黃飛
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
汽車電子
+關(guān)注
關(guān)注
3045文章
8960瀏覽量
172858 -
ROS
+關(guān)注
關(guān)注
1文章
293瀏覽量
18748
原文標(biāo)題:Apex.OS - 基于 ROS 2 的安全認(rèn)證軟件框架
文章出處:【微信號:汽車電子電氣架構(gòu)創(chuàng)新發(fā)展論壇,微信公眾號:汽車電子電氣架構(gòu)創(chuàng)新發(fā)展論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
熱點(diǎn)推薦
Micro-ROS:把ROS2放在MCU上
機(jī)器人的發(fā)展。 ? ROS便是為機(jī)器人在研發(fā)的過程中的代碼復(fù)用提供支持的開源框架,大量的機(jī)器人開源項目,從感知到控制、從定位到構(gòu)圖、從導(dǎo)航到可視化,幾乎都使用ROS作為基礎(chǔ)。 ? Micro-
系統(tǒng)鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開發(fā)環(huán)境嗎?
請問一下,百度文庫資料里面,下圖所示的系統(tǒng)鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開發(fā)環(huán)境嗎?與前面4GB版本的鏡像有什么區(qū)別?
發(fā)表于 03-01 23:06
ROS簡介
目錄一、ROS簡介1、什么是ROS2、ROS產(chǎn)生、發(fā)展和壯大的原因和意義二、在Ubuntu系統(tǒng)中,安裝對應(yīng)版本的ROS軟件1、確定Ubunt
發(fā)表于 12-17 08:24
分享一份RK3308開發(fā)板ROS使用手冊指南
1、ROS使用指南ROS ( Robot Operating System, 機(jī)器人操作系統(tǒng)) ,提供一系列程序庫和工具以幫助軟件開發(fā)者創(chuàng)建機(jī)器人應(yīng)用軟件。它提供了硬件抽象、設(shè)備驅(qū)動、
發(fā)表于 08-16 18:04
安全認(rèn)證技術(shù)在“軟件人”系統(tǒng)中的應(yīng)用
簡要介紹了 “軟件人”的概念、其安全性問題以及幾種安全認(rèn)證技術(shù),并且提出了基于公鑰密碼體制的“軟件人”系統(tǒng)的
發(fā)表于 06-20 08:56
?10次下載
RT-Thread如何使用串口或者無線和ROS連接
機(jī)器人操作系統(tǒng) ROS (Robots Operating System) 最早是斯坦福大學(xué)的一個軟件框架,現(xiàn)在不管是工業(yè)機(jī)器人,還是娛樂用的機(jī)器人都運(yùn)行著 ROS。
RTI公司推出增強(qiáng)版ROS 2支持,實現(xiàn)生產(chǎn)級的解決方案
應(yīng)用開發(fā)人員可利用Connext DDS獨(dú)有的可擴(kuò)展性和生產(chǎn)力工具發(fā)展ROS 2生態(tài)系統(tǒng) 最大的智能機(jī)器及應(yīng)用系統(tǒng)軟件框架提供商RTI公司近日宣布,推出Connext 6
AV開發(fā)人員所采用的ROS框架簡介
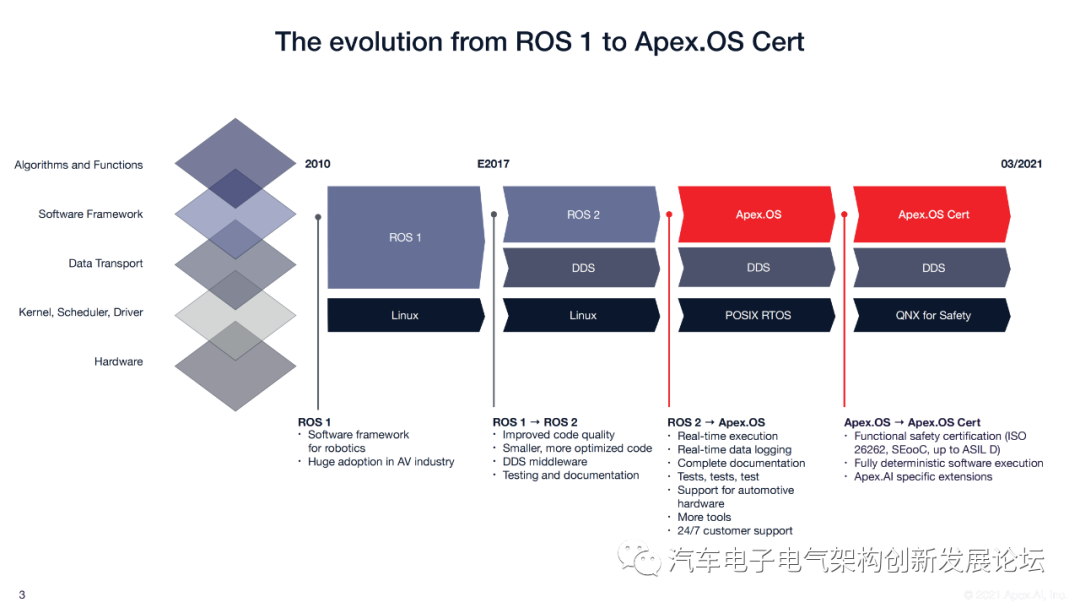
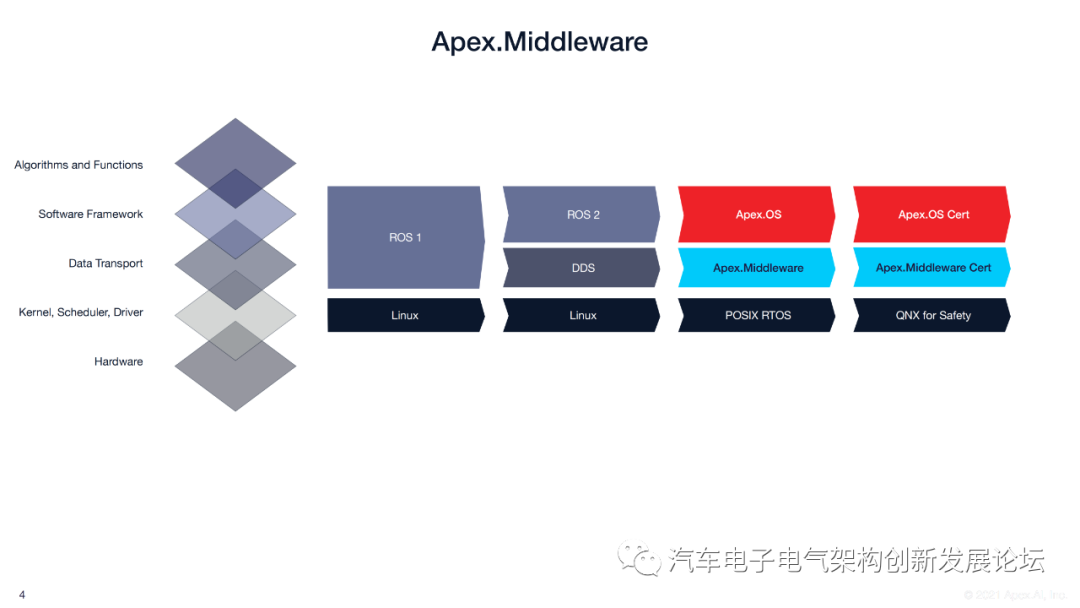
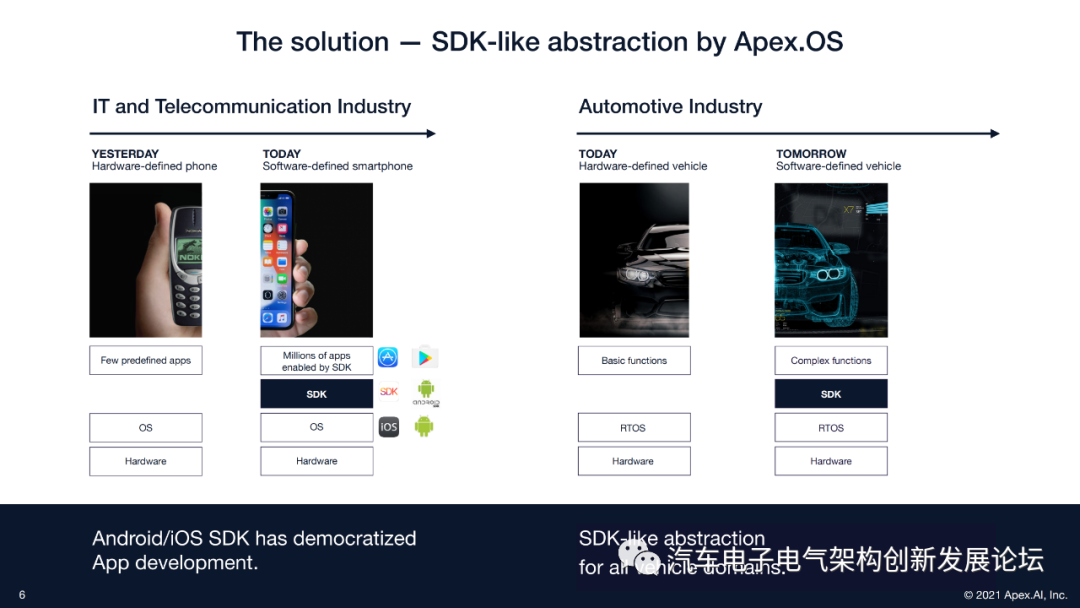
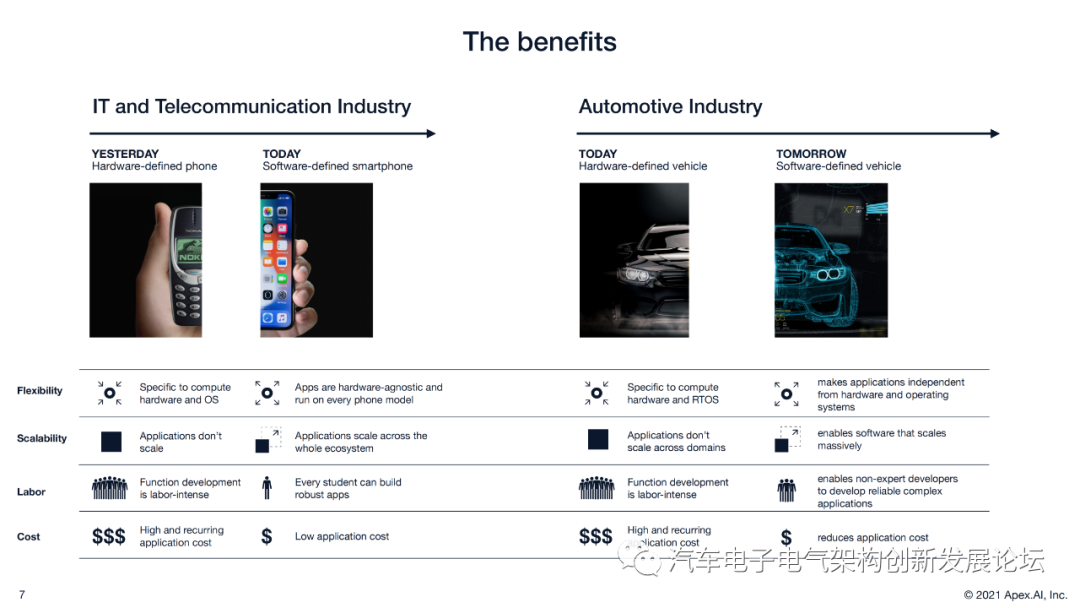
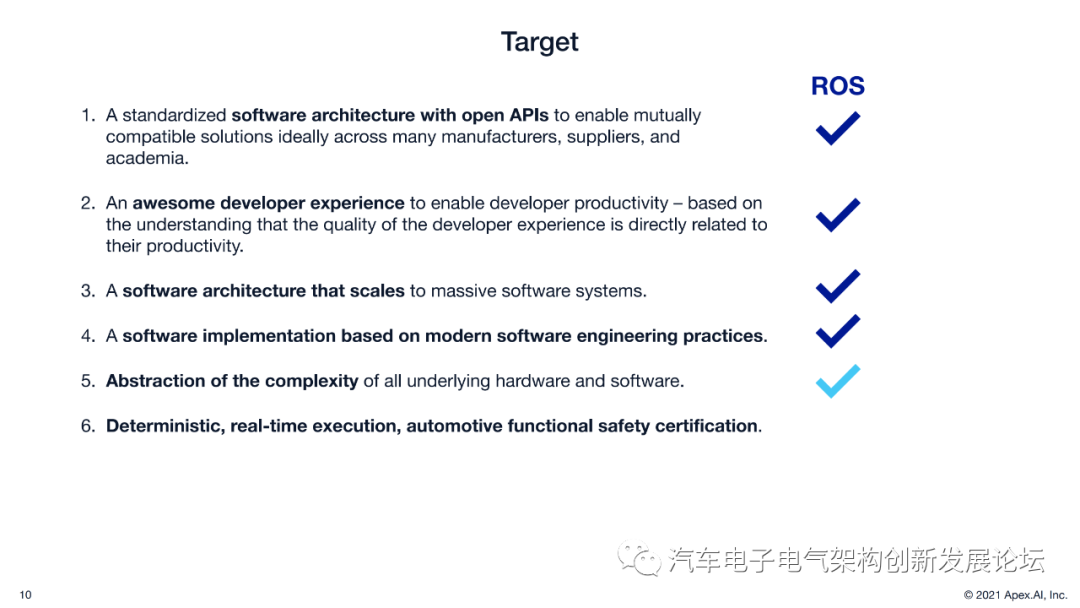
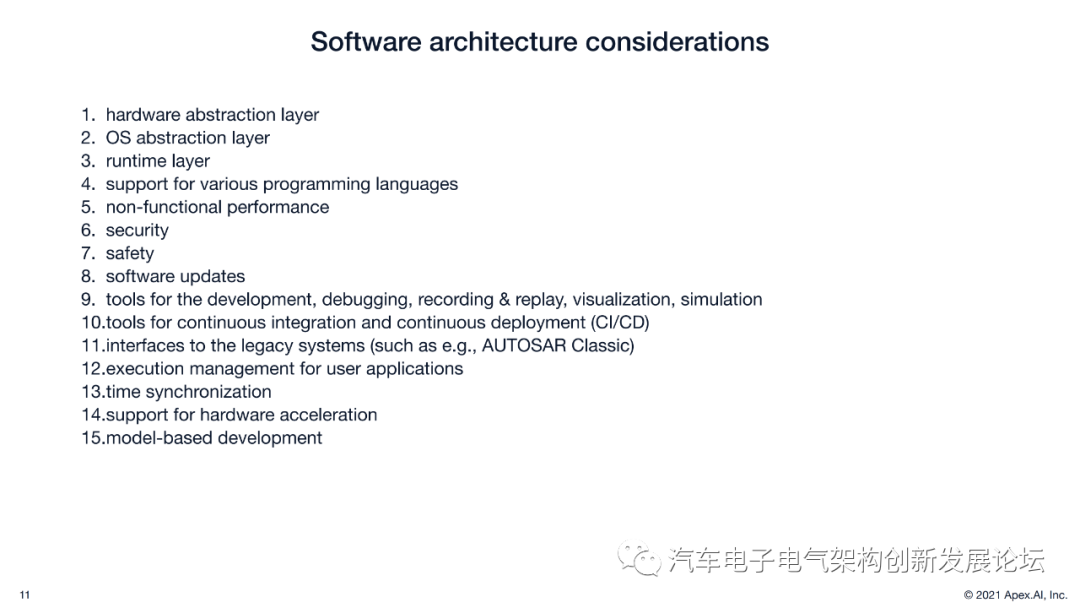
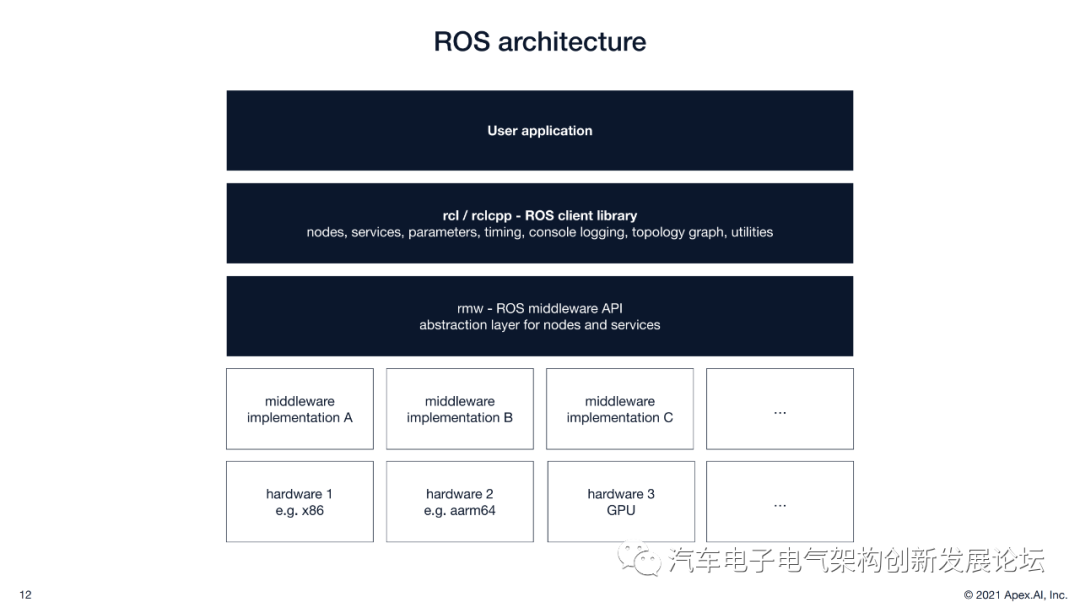
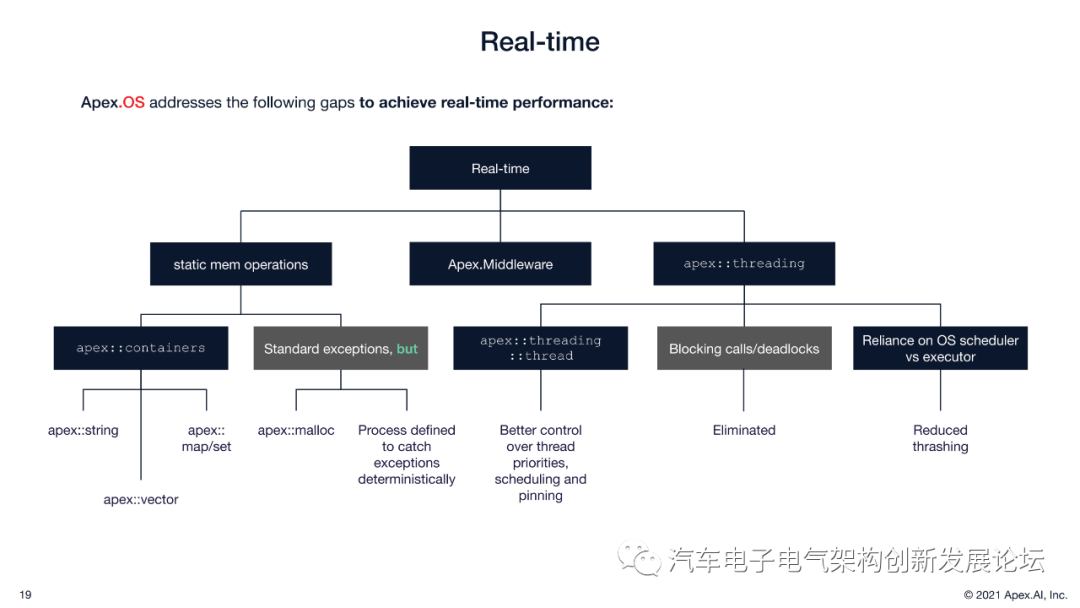
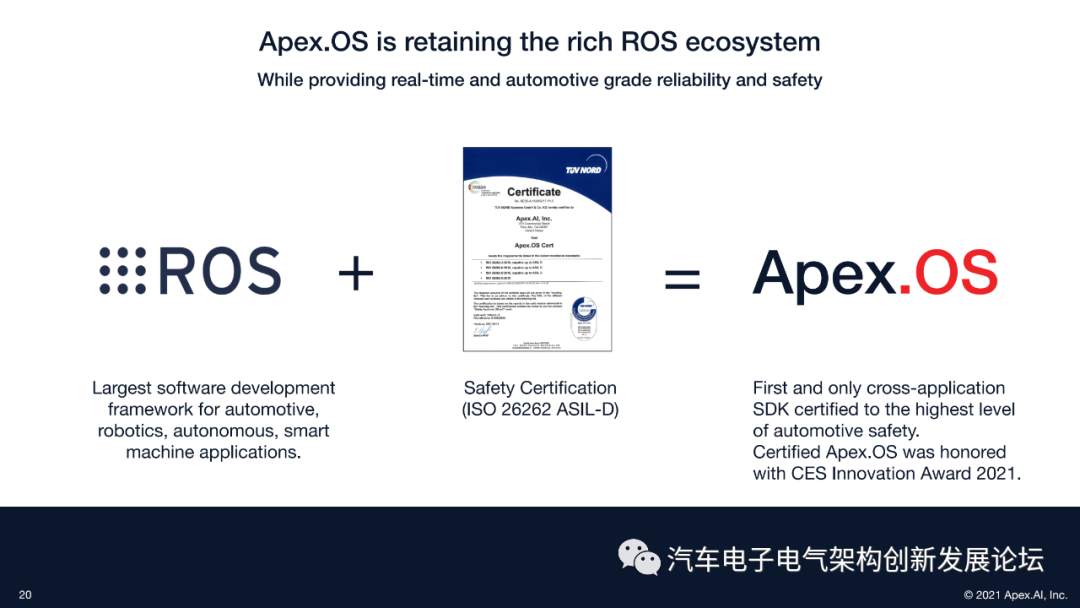
汽車行業(yè)的多個部門一直在采用開源軟件,尤其是在過去十年中基于 Linux 的代碼。 在這里,我們專注于一個稱為機(jī)器人操作系統(tǒng)(ROS)的開放框架。Apex.AI 正在利用 ROS,添加
了解ROS2是什么
ROS2是從底層構(gòu)建時便考慮使其適用于商業(yè)用途,它是機(jī)器人操作系統(tǒng)現(xiàn)有框架的重構(gòu),經(jīng)過優(yōu)化以適用于工業(yè)應(yīng)用,開發(fā)可在新的應(yīng)用中進(jìn)行擴(kuò)展,如移動機(jī)器人、無人機(jī)群和自動駕駛汽車。
ROS1的通信架構(gòu)的基礎(chǔ)通信方式及相關(guān)概念
ROS的通信架構(gòu)是ROS的靈魂所在,它包括數(shù)據(jù)處理,進(jìn)程運(yùn)行,消息傳遞等** 。這篇文章主要介紹ROS1的通信架構(gòu)的基礎(chǔ)通信方式和相關(guān)概念,因為ROS1和

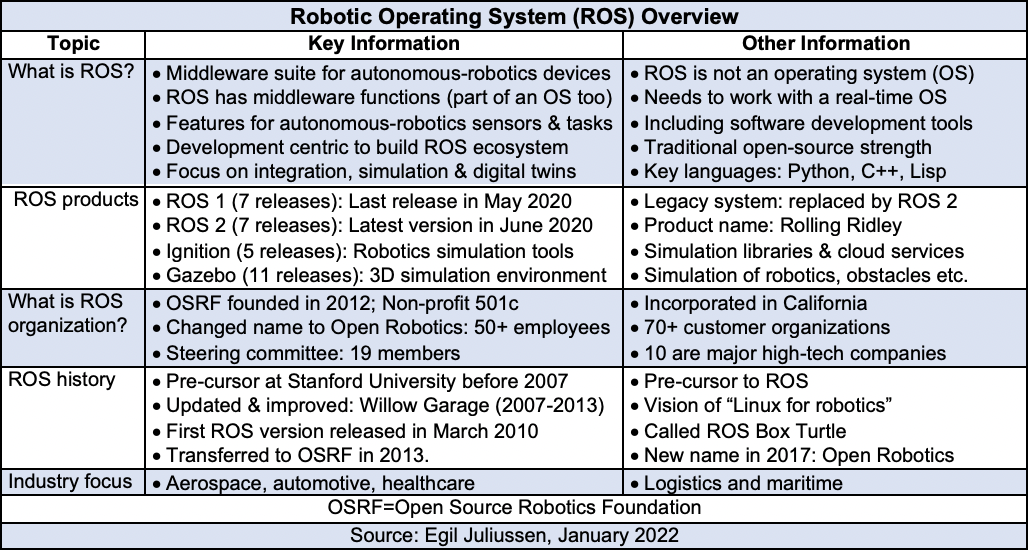
ROS/ROS 2 介紹
ROS是機(jī)器人操作系統(tǒng)(Robot Operating System)的英文縮寫。ROS是用于編寫機(jī)器人軟件程序的一種具有高度靈活性的軟件架構(gòu)。RO
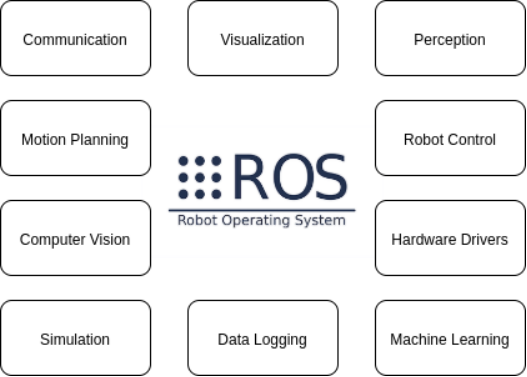
ROS核心框架介紹
ROS核心框架 對于第一個問題,我也沒仔細(xì)研究過源碼,核心代碼基本由python和C++組成,運(yùn)用了xmlrpc機(jī)制,每個運(yùn)行的節(jié)點(diǎn)可以理解成一個進(jìn)程。進(jìn)程間通訊有些是共享內(nèi)存的方式(比如

ROS2中自帶例程測試
如果你是一個ROS2的開發(fā)者,可能對剛才我們使用的ROS2命令比較熟悉,這時你可能也會產(chǎn)生一個問題:我們之前也安裝了ROS2系統(tǒng),那ROS2的原生功能還可以正常運(yùn)行么? 我們再來試一試

在TogetherROS中如何安裝ROS2功能包
,這里我們就把ROS2必要的功能包都安裝一下,讓系統(tǒng)的功能模塊更加完整。 熟悉ROS2的同學(xué),應(yīng)該對這些指令并不陌生,和ROS2官方手冊中的安裝步驟一致,不過還是建議大家跟著課程的步驟一起來安裝一下。 添加

如何基于翼輝信息SylixOS開發(fā)ROS 2應(yīng)用
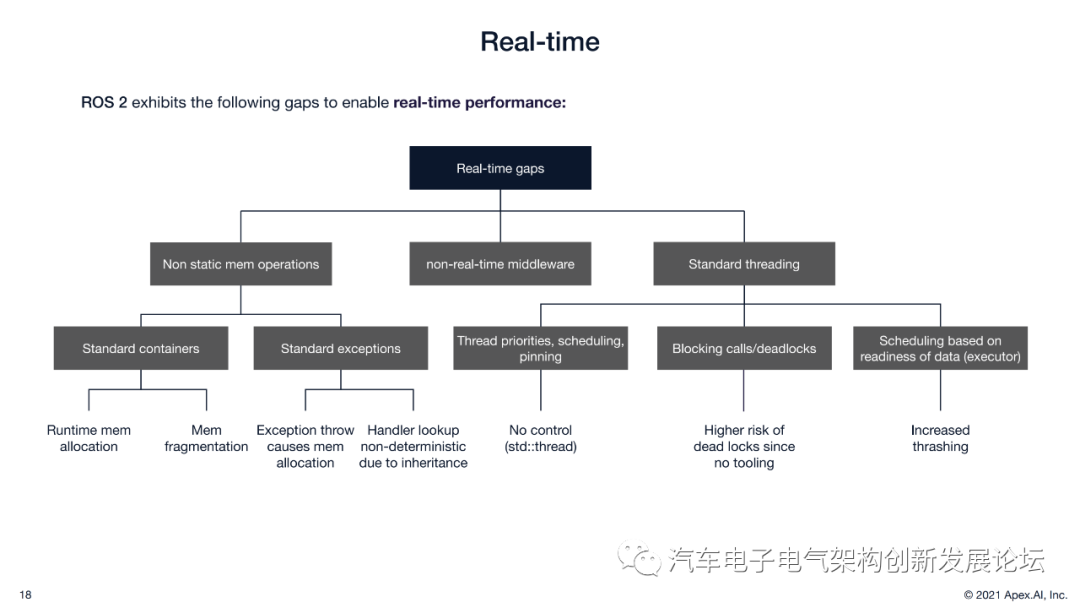
算法的一站式解決方案,同時輔以功能強(qiáng)大的開發(fā)工具,助力工程師與研究人員高效完成項目開發(fā)。ROS 2 在實時性、安全性、靈活性和跨平臺支持等方面進(jìn)行了顯著的改進(jìn),為現(xiàn)代機(jī)器人開發(fā)提供了一個更加高效和可靠的




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論