 Linux驅動開發-編寫按鍵驅動
Linux驅動開發-編寫按鍵驅動

【摘要】 這篇文章介紹,如何使用雜項設備框架編寫一個簡單的按鍵驅動,完成編寫、編譯、安裝、測試等流程,了解一個雜項字符設備驅動的開發流程。
1. 雜項設備注冊函數
這篇文章介紹,如何使用雜項設備框架編寫一個簡單的按鍵驅動,完成編寫、編譯、安裝、測試等流程,了解一個雜項字符設備驅動的開發流程。
下面是雜項字符設備的接口:
struct miscdevice {
int minor; /*次設備號 10 20 */
const char *name; /*設備節點的名稱*/
const struct file_operations *fops; /*文件操作集合*/
struct list_head list; //鏈表
struct device *parent;
struct device *this_device;
const char *nodename;
umode_t mode;
};
//注冊雜項字符設備
extern int misc_register(struct miscdevice * misc);
//注銷雜項字符設備
extern int misc_deregister(struct miscdevice *misc);
按鍵需要將值傳遞給應用層,需要使用到copy_to_user函數,這個函數還有一個配對的copy_from_user,下面介紹這兩個函數的詳細功能和參數:
#include
unsigned long copy_to_user(void __user *to, const void *from, unsigned long n)
函數功能: 將驅動層數據拷貝到應用層。
函數參數:
void __user *to 用戶空間的地址--到哪里去
const void *from 驅動層的地址--從哪里來
unsigned long n 拷貝的大小
返回值: 0表示成功。 >0表示未拷貝成功的數量。
unsigned long copy_from_user(void *to, const void __user *from, unsigned long n)
函數功能: 將應用層的數據拷貝到驅動層。
函數參數:
void *to 驅動空間的地址--拷貝到哪里去
const void __user *from 用戶空間的地址--從哪里來
unsigned long n 拷貝的大小
返回值: 0表示成功。 >0表示未拷貝成功的數量。
2. 編寫按鍵驅動
使用雜項設備注冊按鍵驅動,應用層使用read接口讀取按鍵值。
編寫驅動之前需要先找到按鍵的原理圖,找到按鍵接到CPU那個IO上的。
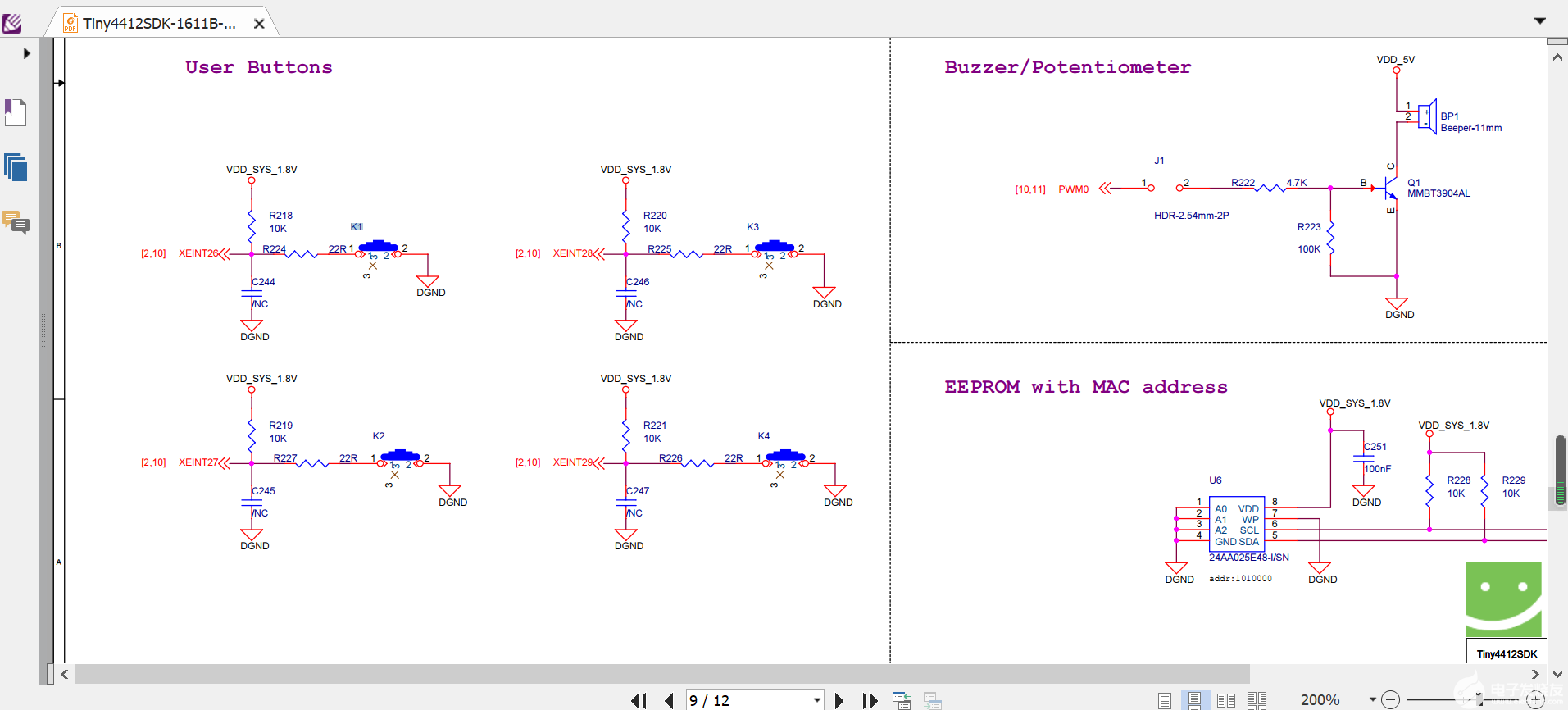
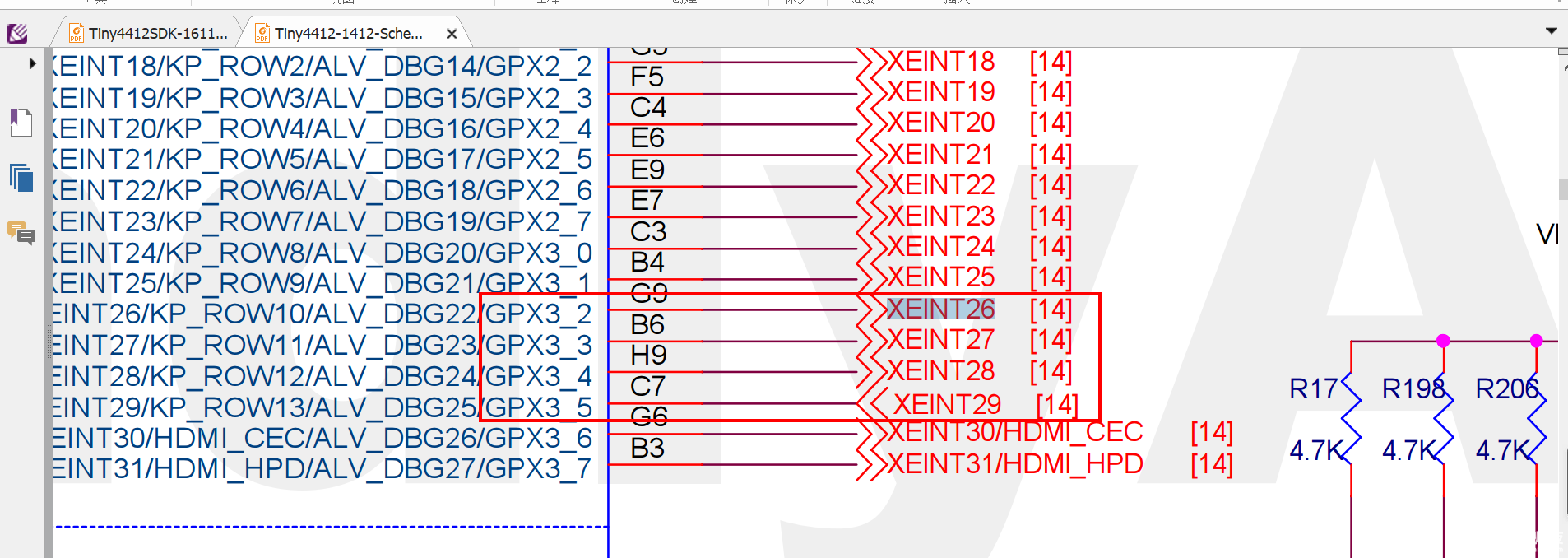
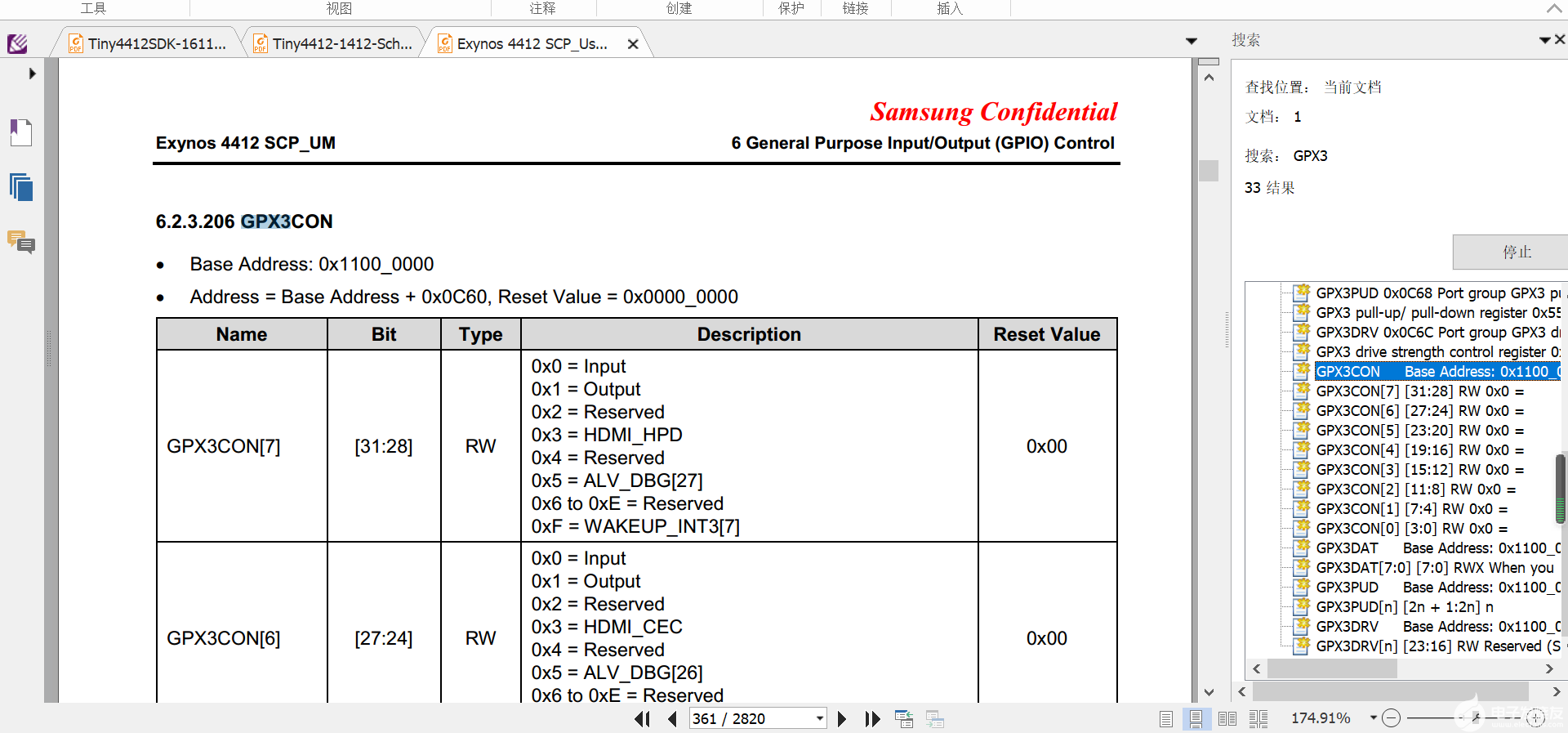
然后再查閱數據手冊,找到這個GPIO口的寄存器地址,寄存器的配置頁面,方便初始化配置GPIO口為輸入模式。
2.1 按鍵驅動源代碼
#include
#include
#include
#include
#include
#include
/* 按鍵的寄存器*/
static unsigned int *GPX3CON;
static unsigned int *GPX3DAT;
static int tiny4412_open(struct inode *inode, struct file *file)
{
printk("tiny4412_open-->ok\n");
return 0;
}
/*應用層的函數:
int key_val;
read(fd,&key_val,4)
ssize_t read(int fd, void *buf, size_t count);
*/
static ssize_t tiny4412_read(struct file *file, char __user *buf, size_t size, loff_t *seek)
{
int key_val=0;
if(!(*GPX3DAT&1<<2)) //判斷按鍵是否按下
{
key_val=0x1;
}
else if(!(*GPX3DAT&1<<3)) //判斷按鍵是否按下
{
key_val=0x2;
}
else if(!(*GPX3DAT&1<<4)) //判斷按鍵是否按下
{
key_val=0x3;
}
else if(!(*GPX3DAT&1<<5)) //判斷按鍵是否按下
{
key_val=0x4;
}
/*數據拷貝函數: 給應用層空間賦值--將驅動層的數據拷貝給應用層*/
/*copy_to_user(void __user *to, const void *from, unsigned long n)*/
int error;
error=copy_to_user(buf,&key_val,4);
if(error>0)
{
printk("數據拷貝失敗.\n");
}
return 0;
}
static ssize_t tiny4412_write(struct file *file, const char __user *buf, size_t size, loff_t *seek)
{
return 0;
}
static int tiny4412_release(struct inode *inode, struct file *file)
{
printk("tiny4412_release-->ok\n");
return 0;
}
static struct file_operations fops=
{
.open=tiny4412_open,
.read=tiny4412_read,
.write=tiny4412_write,
.release=tiny4412_release
};
/*
Linux內核管理驅動---設備號
設備號是一個unsigned int 的變量--32位。
設備號=主設備號+次設備號
*/
static struct miscdevice misc=
{
.minor = MISC_DYNAMIC_MINOR, /*次設備號填255表示自動分配 主設備號固定為10*/
.name = "tiny4412_key", /*/dev目錄下文件名稱*/
.fops = &fops, /*文件操作接口*/
};
static int __init tiny4412_key_init(void)
{
/*轉換物理地址*/
GPX3CON=ioremap(0x11000C60,4);
GPX3DAT=ioremap(0x11000C64,4);
/*配置GPIO口模式--配置按鍵*/
*GPX3CON&=0xFF0000FF;
/*1. 雜項設備的注冊函數*/
misc_register(&misc);
printk("按鍵: 驅動安裝成功\n");
return 0;
}
static void __exit tiny4412_key_exit(void)
{
/*2. 雜項設備的注銷函數*/
misc_deregister(&misc);
/*取消轉換*/
iounmap(GPX3CON);
iounmap(GPX3DAT);
printk("按鍵: 驅動卸載成功\n");
}
module_init(tiny4412_key_init); /*驅動入口--安裝驅動的時候執行*/
module_exit(tiny4412_key_exit); /*驅動出口--卸載驅動的時候執行*/
MODULE_LICENSE("GPL"); /*設置模塊的許可證--GPL*/
2.2 makefile文件
編譯驅動的makefile代碼。
KER_DRI=/home/wbyq/work/linux-3.5/linux-3.5
all:
make -C $(KER_DRI) M=`pwd` modules
cp *.ko /home/wbyq/work/rootfs/code -f
make -C $(KER_DRI) M=`pwd` modules clean
arm-linux-gcc app.c -o app
cp app /home/wbyq/work/rootfs/code -f
rm app -f
obj-m += miscdev_key_drv.o
2.3 應用層驅動測試代碼
編譯完運行時,傳入按鍵的設備節點文件.
#include
#include
#include
#include
int main(int argc,char **argv)
{
if(argc!=2)
{
printf("./app <設備節點文件>\n");
return 0;
}
/*1. 打開設備文件*/
int fd=open(argv[1],O_RDWR);
if(fd<0)
{
printf("%s 設備驅動打開失敗.\n",argv[1]);
return 0;
}
/*2.讀寫數據*/
int key_val;
while(1)
{
read(fd,&key_val,4);//讀取按鍵值
if(key_val)
{
printf("%#x\n",key_val);
}
}
/*3. 關閉文件*/
close(fd);
return 0;
}
2.4 驅動安裝流程
[root@wbyq code]# ls
tiny4412_key_drv.ko
[root@wbyq code]#
[root@wbyq code]# insmod tiny4412_key_drv.ko
[ 173.340000] 驅動測試: 驅動安裝成功
[root@wbyq code]# lsmod
hello_drv 616 0 - Live 0xbf000000 (O)
[root@wbyq code]# modinfo tiny4412_key_drv.ko
filename: tiny4412_key_drv.ko
license: GPL
depends:
vermagic: 3.5.0-FriendlyARM SMP preempt mod_unload ARMv7 p2v8
[root@wbyq code]# rmmod tiny4412_key_drv.ko
[ 391.075000] 驅動測試: 驅動卸載成功
[root@wbyq code]#
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
驅動
+關注
關注
12文章
1986瀏覽量
88659 -
函數
+關注
關注
3文章
4419瀏覽量
67774 -
按鍵
+關注
關注
4文章
229瀏覽量
58533
發布評論請先 登錄
相關推薦
熱點推薦
如何理解Linux內核中的PCIe驅動
各異的芯片組,加上各種 PCI 設備自身獨特的功能需求,Linux 內核中的 PCI 支持遠比我們希望的要復雜得多。今天這篇文章,我們將從驅動開發的視角,梳理 Linux PCI 設備
Linux內核驅動開發的技術核心精要
嵌入式Linux驅動開發是連接硬件與操作系統的關鍵環節。隨著內核演進(如Linux 6.13)和硬件復雜度提升,開發者需掌握并發控制、中斷分
發表于 03-10 13:56
深度解析ES8389/ES8390/音頻芯片Linux驅動(Linux6.1內核)
基于 Linux6.1 內核,從驅動架構、寄存器配置、核心函數、數據流走向四個維度,完整拆解 ES8389 的 Linux 驅動實現,幫你吃透這款芯片的
迅為Hi3403開發板驅動教程全面上線,開啟嵌入式Linux開發新篇章!
迅為iTOP-Hi3403開發板linux驅動教程全面上線,開啟嵌入式Linux開發新篇章!

從小白到大牛:Linux嵌入式系統開發的完整指南
,從字符設備驅動入手,學習設備樹(Device Tree)語法,通過編寫 LED、按鍵等簡單驅動,理解 “驅動 - 內核 - 硬件”的交互邏
發表于 12-16 10:42
Linux驅動開發的必備知識
、內核模塊編程:
掌握內核模塊的編寫、編譯、加載和卸載方法。
了解內核模塊的初始化和清理函數的編寫。
5、設備驅動框架:
熟悉字符設備、塊設備、網絡設備等驅動框架。
能夠根據
發表于 12-04 07:58
迅為iTOP-3568開發板?Linux驅動開發實戰:menuconfig圖形化配置實驗
迅為iTOP-3568開發板?Linux驅動開發實戰:menuconfig圖形化配置實驗

【迅為工業RK3568穩定可靠】itop-3568開發板Linux驅動開發實戰:RK3568內核模塊符號導出詳解
【迅為工業RK3568穩定可靠】itop-3568開發板Linux驅動開發實戰:RK3568內核模塊符號導出詳解
【免費送書】成為硬核Linux開發者:《Linux 設備驅動開發(第 2 版)》
Linux系統的設備驅動開發,一直給人門檻較高的印象,主要因內核機制抽象、需深度理解硬件原理、開發調試難度大所致。2021年,一本講解驅動

【書籍評測活動NO.67】成為硬核Linux開發者:《Linux 設備驅動開發(第 2 版)》
,開發設備驅動和板級支持包。截至目前,Linux仍是嵌入式系統領域的主流內核,幾乎廣泛應用于工業界的所有領域,這主要得益于其功能強大的子系統。因此,約翰·馬迪厄編寫本書,向廣大
發表于 11-17 17:52
迅為3568開發板從零學習Linux驅動開發:迅為一站式資料包如何讓我效率翻倍
迅為3568開發板從零學習Linux驅動開發:迅為一站式資料包如何讓我效率翻倍

【北京迅為】itop-3568開發板驅動開發指南(重制版)
iTOP-RK3568開發板驅動開發指南目錄:前言學習方法Linux驅動基礎第 1 章 你好!內核源碼第 2 章 helloworld
發表于 10-30 15:48
?40次下載
itop-3568開發板驅動開發指南-實驗程序的編寫
本實驗對應的網盤路徑為:iTOP-RK3568 開發板【底板 V1.7 版本】\\\\03_【iTOP-RK3568開發板】指南教程\\\\02_Linux 驅動配套資料\\\\04_
發表于 05-19 10:26
Linux環境再升級:PLIN驅動程序正式發布
PLIN驅動程序現已正式發布,本文將展示如何安裝PLIN驅動程序,以及如何在Linux環境下進行基本的PLIN通信操作,確保您能夠快速掌握并應用這一新工具。




 工商網監
工商網監
評論