") 使用myPalletizer人工智能套件實現(xiàn)顏色和圖像識別
使用myPalletizer人工智能套件實現(xiàn)顏色和圖像識別

基于Linux系統(tǒng)和ROS中的1:1仿真模型,myPalletizer人工智能套件由視覺、定位抓取和自動分揀模塊組成。具有配備的視覺功能,通過OpenCV識別和定位不同顏色或圖像的立方體,機械臂的核心處理器可以計算其當前目標空間坐標位置,最后將立方體夾入相應的桶中。
下面是使用myPalletizer 260 Pi 人工智能套件,實現(xiàn)顏色和圖像識別的詳細過程。

一、顏色識別
1.在桌面使用Ctrl+Alt+T組合快捷鍵開啟一個命令窗口,輸入以下命令啟動master節(jié)點:
roscore
2.在命令終端中鍵入Ctrl+Shift+T開啟同目錄下的另一個命令窗口,再輸入命令啟動vision.launch文件
roslaunch myPalletizer_260 vision.launch
運行結果如圖所示:
3.Ctrl+Alt+T打開另一個命令窗口,輸入命令進入到待操作文件目錄
cd catkin_ws/src/mycobot_ros/mycobot_ai/myPalletizer_260/
4.運行程序detect_obj_color.py ,即可實現(xiàn)顏色識別并抓取了。
python scripts/detect_obj_color.py
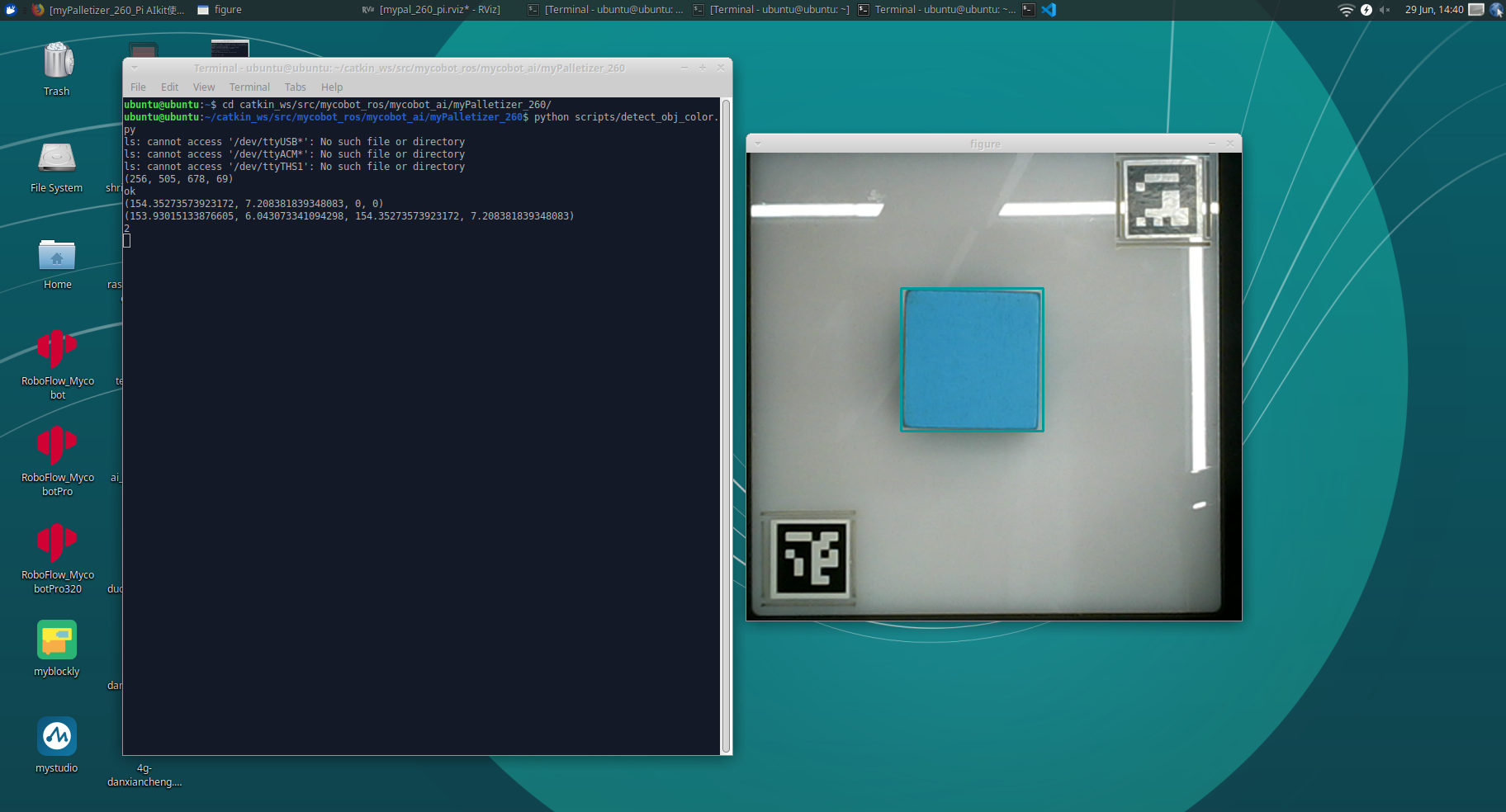
之后我們可以看到如下:
二、圖像識別
1.運行detect_obj_img_folder_opt.py 程序前,請確保已執(zhí)行顏色識別中的步驟1,2,3
2.運行添加圖片的程序add_img.py,根據(jù)你的需要把要識別的圖片添加到指定文件夾('red', 'blue', 'green', 'gray')
python scripts/add_img.py
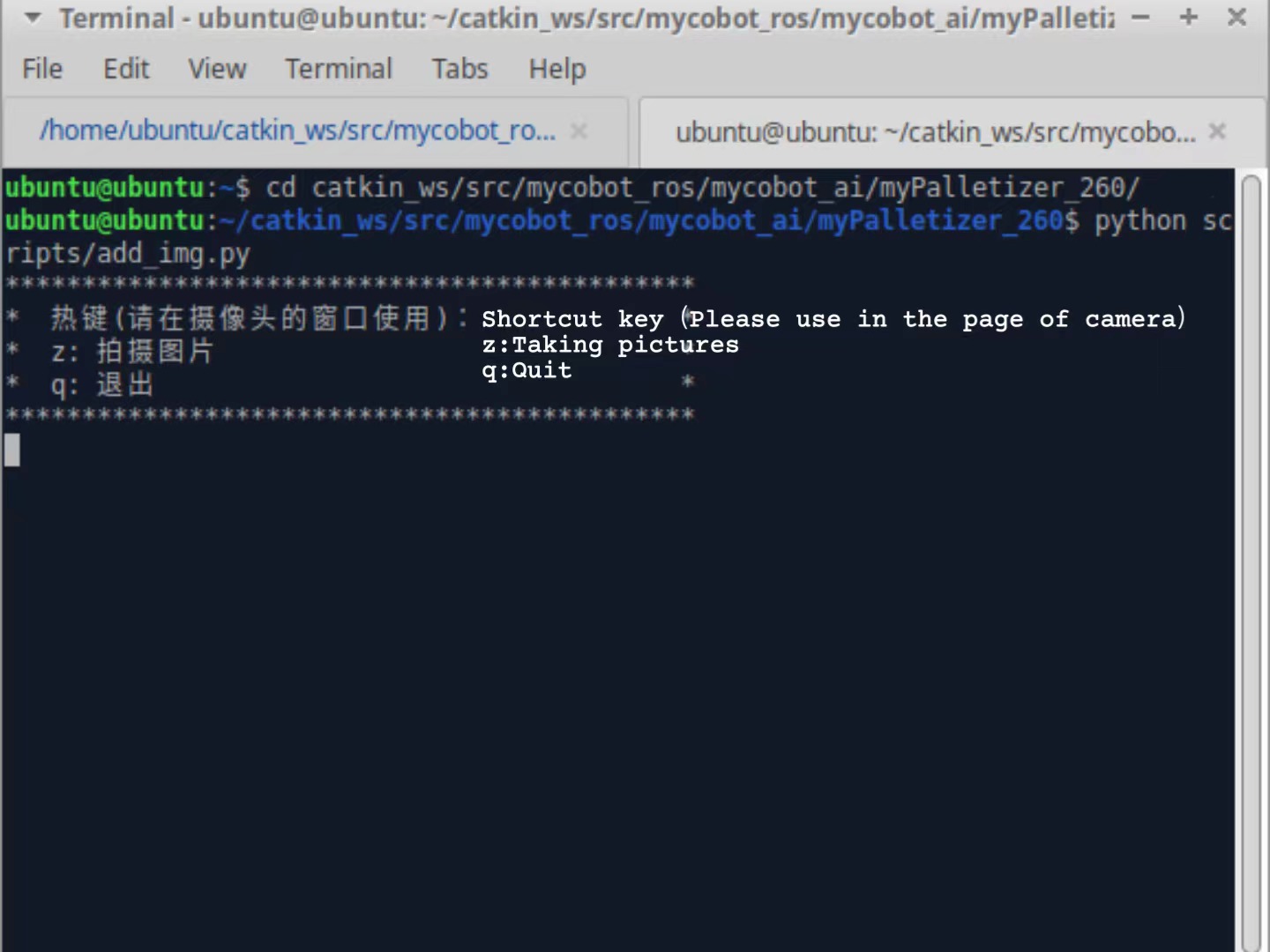
根據(jù)終端輸入的提示進行操作,在彈出的第二個圖像框中進行圖像的截取(通過鼠標左鍵進行圖像區(qū)域的選取)。
3.圖像截取區(qū)域完成后,按下回車鍵,根據(jù)終端提示,輸入保存圖像的文件夾名稱('red', 'blue', 'green', 'gray'),按下回車鍵即可保存至對應文件夾。
4.啟動圖像識別程序detect_obj_img_folder.py ,驗證步驟2,3中添加的圖片機械臂是否能正確吸取并放到相對應顏色的桶中。
python scripts/detect_obj_img_folder_opt.py
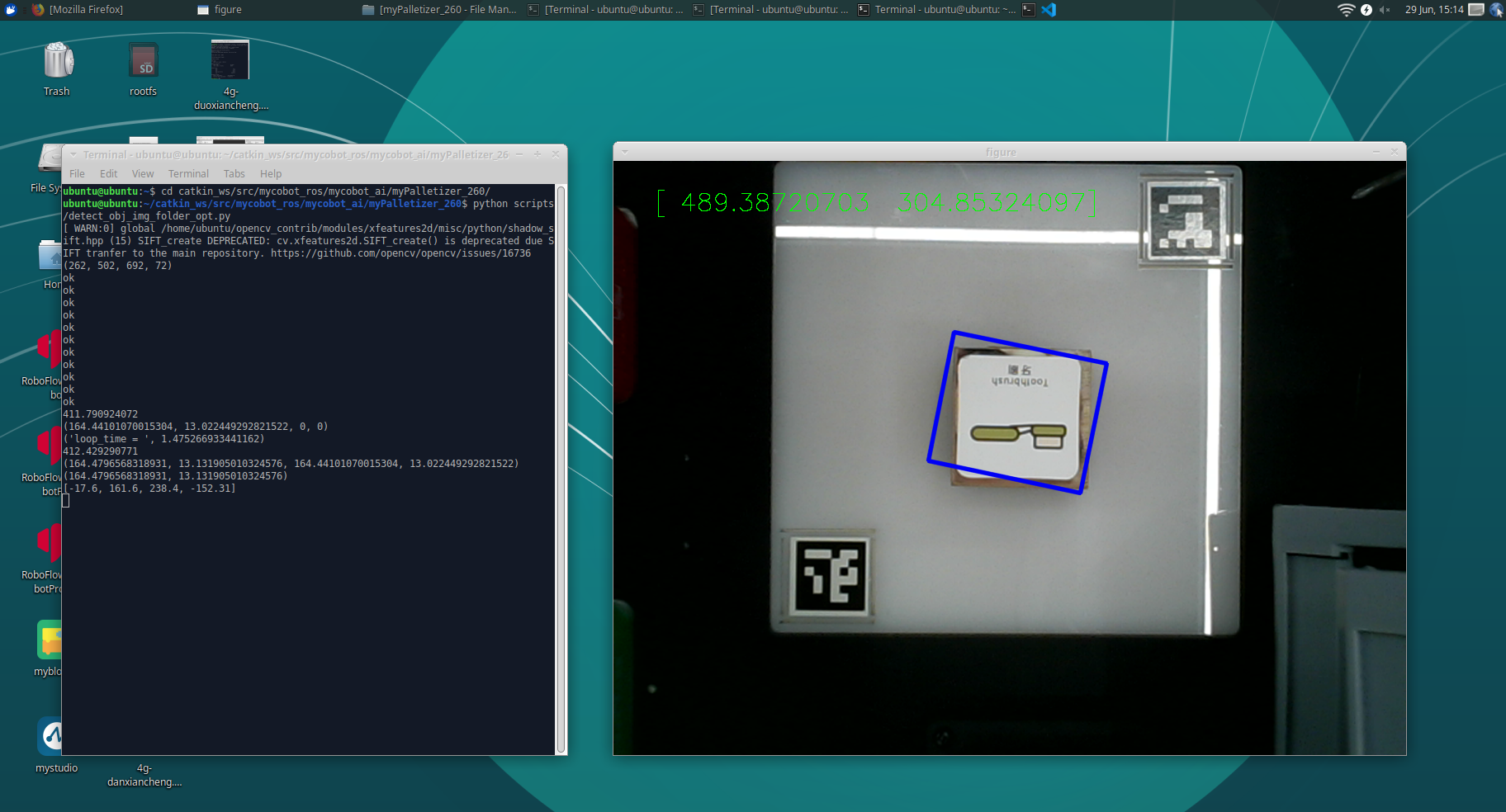
然后,我們可以得到如圖所示的結果:
這款產(chǎn)品為研發(fā)人員以及STEM教育工作者量身定做,他們會對人工智能套裝與機器人相結合的應用程序感興趣。如果你擁有這款人工智能套件,除了顏色和圖像識別,你還想實現(xiàn)什么應用場景?請在評論中與我們分享!
審核編輯:湯梓紅
-
Linux
+關注
關注
88文章
11758瀏覽量
219009 -
人工智能
+關注
關注
1817文章
50094瀏覽量
265287 -
ROS
+關注
關注
1文章
293瀏覽量
18722
發(fā)布評論請先 登錄
海康威視礬花圖像識別智能系統(tǒng)推動水質(zhì)處理精細化管控
探索CY8CKIT - 062S2 - AI PSoC? 6人工智能評估套件
ADTF驅(qū)動海康威視相機及qt圖像顯示操作流程#海康威視#傳感器#數(shù)據(jù)采集#配置#圖像識別
基于米爾MYC-YM90X安路飛龍DR1開發(fā)板儀表圖像識別系統(tǒng)開發(fā)
華怡豐推出ISC-B/C系列圖像識別傳感器
挖到寶了!人工智能綜合實驗箱,高校新工科的寶藏神器
挖到寶了!比鄰星人工智能綜合實驗箱,高校新工科的寶藏神器!
火車車號圖像識別系統(tǒng)如何應對不同光照條件下的識別問題?

手持終端集裝箱識別系統(tǒng)的圖像識別技術
岸橋箱號識別系統(tǒng)如何工作?揭秘AI圖像識別技術!
驚了!這個“神器”讓樹莓派秒變智能管家,圖像識別+無線投屏,太秀了!

【幸狐Omni3576邊緣計算套件試用體驗】RKNN 推理測試與圖像識別
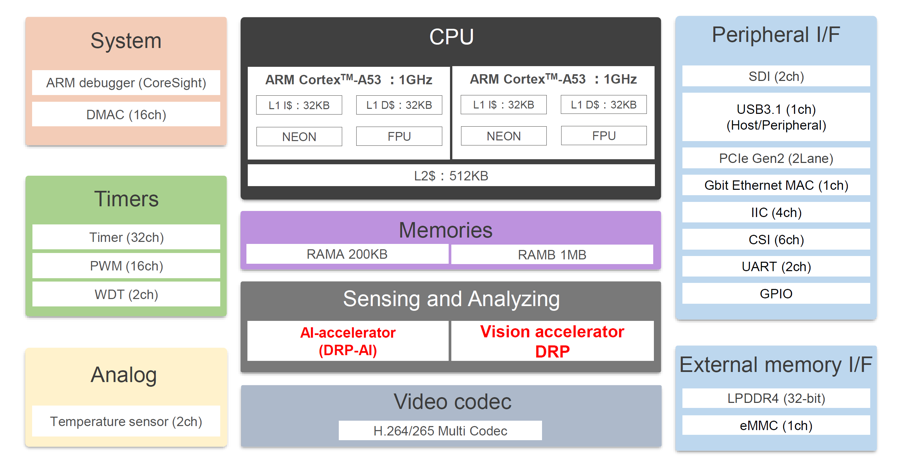
支持實時物體識別的視覺人工智能微處理器RZ/V2MA數(shù)據(jù)手冊
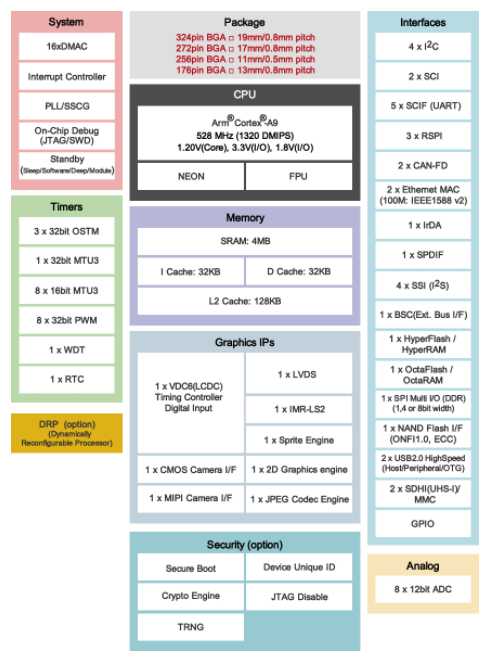
基于嵌入式人工智能的高速圖像處理的微處理器RZ/A2M數(shù)據(jù)手冊



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論