") 采用HBEns的軌跡預測模型設計
采用HBEns的軌跡預測模型設計

摘要:軌跡預測是自動駕駛系統(tǒng)中不可或缺的一環(huán),對幫助理解車體周圍環(huán)境和其它人、車的意圖有著至關重要的作用。在2022年Waymo自動駕駛數(shù)據(jù)集挑戰(zhàn)賽上,地平線使用了HBEns模型框架,基于“在單模型的輸出上使用模型聚合”的二階段思路,大幅提升了總體軌跡預測精度,同時給予了較高的模型設計自由性。
簡介
給定一份道路地圖和周圍所有可觀測的物體的歷史軌跡,軌跡預測模型的任務是將目標物體的未來軌跡預測出來。現(xiàn)階段的軌跡預測模型根據(jù)輸入編碼類型的不同可以分成基于柵格(raster-based)、基于矢量(vector-based)和基于圖(graph-based)這三大類。基于柵格的模型一般通過卷積神經(jīng)網(wǎng)絡(CNN)編碼信息;另兩種則側(cè)重于使用transformer結(jié)構(gòu)或其他圖算法進行地圖、物體的編碼。從工程角度而言,兩者各有優(yōu)劣:CNN已被廣泛應用多年,硬件加速成熟,但和近幾年才發(fā)展起來的transformer相比存在地圖輸入尺寸受限、預測精度低等問題。綜合考慮,HBEns建立在“基礎模型(base models)+模型聚合(model ensemble)”的思想上(圖1)。對于模型聚合來說,前面的基礎模型即相當于一個黑盒,從而賦予模型設計很大的自由性。
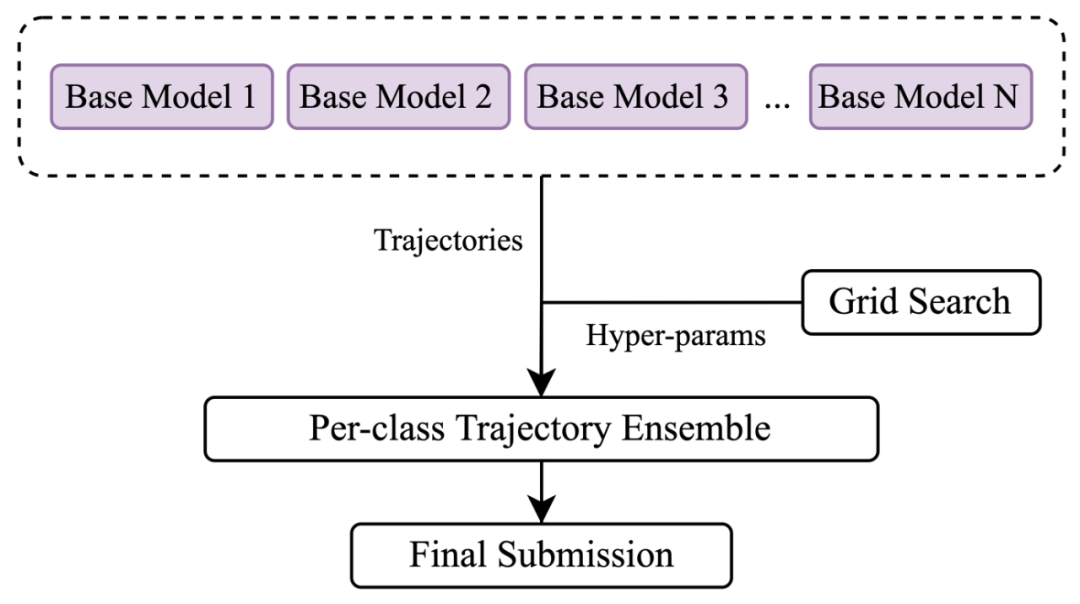
圖1 HBEns流程圖。多個基礎模型的結(jié)果通過分類別的軌跡聚合實現(xiàn)最后輸出,軌跡聚合的參數(shù)通過網(wǎng)格調(diào)參實現(xiàn)。
方法
基礎模型沿用了HOME和MultiPath++的設計,并在此基礎上增加了新特性。對于自行車、行人等運動速度較慢的物體,基于柵格的HOME模型性能優(yōu)異;對運動較快的汽車,基于矢量輸入的MultiPath++則更勝一籌。
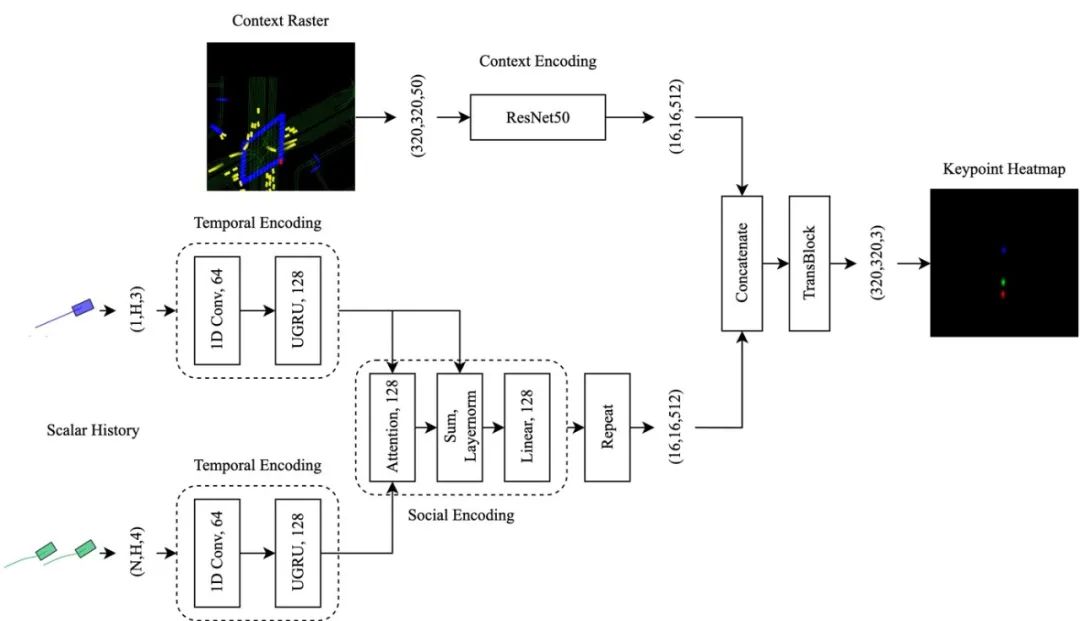
圖2基于HOME模型的第一階段結(jié)構(gòu) HOME模型是一個二階段模型,其一階段結(jié)構(gòu)見圖2。自車軌跡、周圍物體軌跡和地圖信息分三路分別完成編碼,目標物體信息和周圍物體信息還會進行一次attention操作來增強信息互動。原始的HOME輸出的是物體最后所在位置的熱力點圖,HBEns則采用了3/5/8s共三個點的位置生成熱力圖,來加強監(jiān)督過程。 第二階段(圖3)采用了輕量級的CNN和源自MultiPath++的多語境門控機制(multi-context gating, MCG)來解決原始HOME無法較好處理低清熱力圖的問題。MCG模塊的功能類似于attention,目的是將3/5/8s的信息融合編碼進目標物體的軌跡信息中。
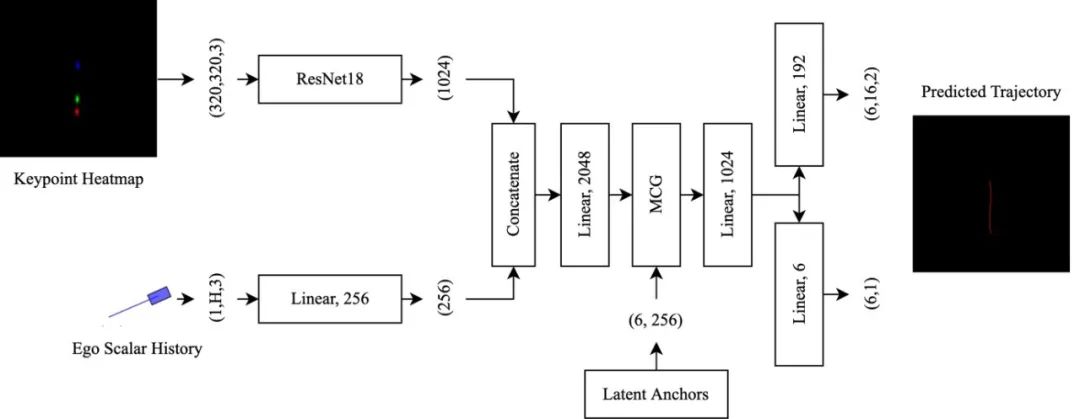
圖3CNN+MCG門控機制實現(xiàn)第二階段從熱力圖到軌跡的輸出 針對MultiPath++模型,兩種不同的輸入表示被采用:1)選取距離目標物體最近的256個地圖標記(包括中心線、路沿、車道線等);2)僅選取128個距離目標物體最近的車道中心線標記。選取的過程采用了廣度優(yōu)先搜索(BFS)算法。每個標記額外擁有一個0-1矢量來注記它的其他特性(如是否位于斑馬線、減速帶內(nèi))。模型結(jié)構(gòu)上,在不損失精度的前提下,采用GRU模塊替換了MultiPath++原有的LSTM模塊。
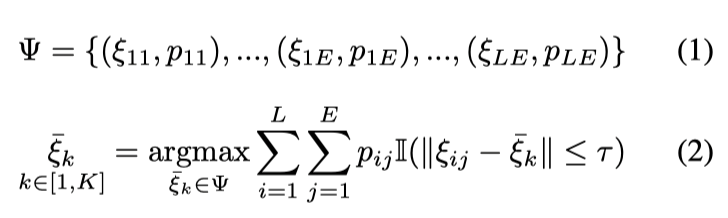
圖4 基于貪婪策略的軌跡選擇。每根軌跡由坐標點ξ和置信度p描述。每一輪迭代中,在給定距離閾值τ條件下,貪婪策略優(yōu)先選擇閾值范圍內(nèi)所有軌跡的置信度總和最高的軌跡作為中心軌跡。閾值內(nèi)的其他軌跡在下一輪不參與選取。 HBEns對MultiPath++中的模型聚合(model ensemble)進行了一定的改進并實驗了一些新的想法。執(zhí)行模型聚合之前,首先利用一個聚類算法從所有輸入的軌跡中選取K根作為“中心軌跡”。聚類算法可以通過貪婪策略(greedy)或非極大值抑制(NMS)來實現(xiàn)。貪婪策略傾向于選擇周圍軌跡較為集中的作為中心(圖4),而NMS則著眼于每根軌跡的置信度,每次選擇置信度最高的軌跡,并將周圍的一定范圍內(nèi)的其他軌跡抑制。完成中心選擇后,采用最大期望算法(EM)進行迭代,完成軌跡的最終迭代更新。
實驗結(jié)果
模型聚合的步驟存在多種可調(diào)參數(shù),因此網(wǎng)格調(diào)參可以幫助搜索到最優(yōu)的參數(shù)配置。對于自行車和行人等行動方向更擴散的物體,NMS在聚合中的效果更優(yōu);車輛則一般沿著既定的車道線行駛,因此貪婪策略的中心點選擇效果更好。表1綜合了網(wǎng)格調(diào)參后每個類別的最優(yōu)參數(shù)配置。表2的實驗結(jié)果證明,模型聚合對提升單個模型的預測準確度有著顯著的幫助。
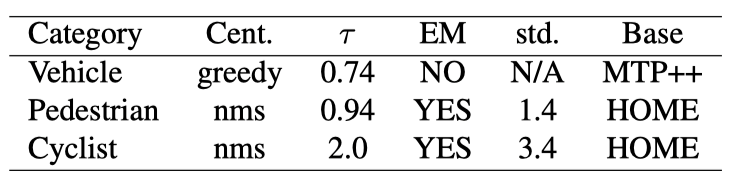
表1 針對每個類別的網(wǎng)格搜參結(jié)果
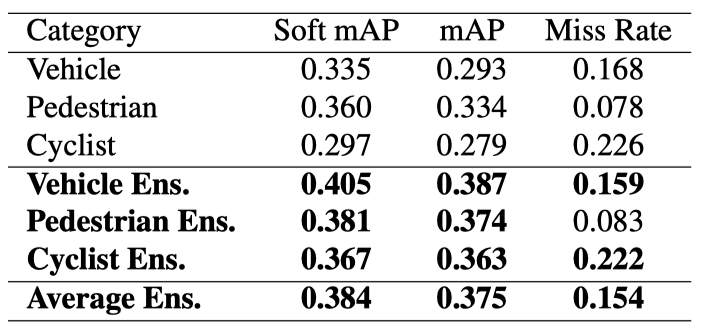
表2 驗證集上模型聚合前后的mAP指標變化
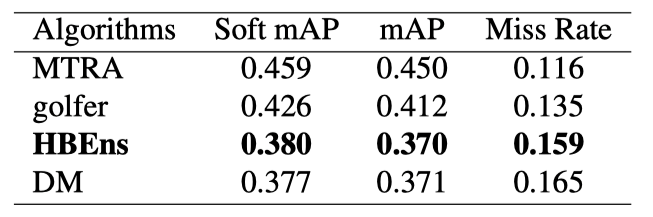
表3 測試集上HBEns排名
可視化結(jié)果
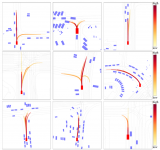
下圖是HBEns結(jié)果的可視化。其中藍色代表實車軌跡,青色代表模型預測軌跡,黑色代表道路中心線軌跡,紅色為路沿,黃色為斑馬線區(qū)域。模型共輸出6條可能的軌跡及其置信度,來預測物體未來的前進方向。
總結(jié)
HBEns模型框架采用了“基礎模型+模型聚合”的思路,使得模型擁有較大的設計空間,可針對不同的類型、數(shù)據(jù)集做出優(yōu)化。基于EM算法的模型聚合作為后處理步驟,顯著提高了僅使用單模型進行預測的精度。
審核編輯:湯梓紅
-
模型
+關注
關注
1文章
3752瀏覽量
52111 -
自動駕駛
+關注
關注
793文章
14883瀏覽量
179880 -
地平線
+關注
關注
0文章
460瀏覽量
16352
原文標題:開發(fā)者說 | HBEns:基于模型聚合的軌跡預測方案
文章出處:【微信號:horizonrobotics,微信公眾號:地平線HorizonRobotics】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
從數(shù)據(jù)到模型:如何預測細節(jié)距鍵合的剪切力?
大模型賦能物資需求精準預測與采購系統(tǒng)軟件平臺
大模型賦能物資需求精準預測與采購系統(tǒng):功能特點與平臺架構(gòu)解析
世界模型是讓自動駕駛汽車理解世界還是預測未來?

自動駕駛為什么要重視軌跡預測?

Nullmax端到端軌跡規(guī)劃論文入選AAAI 2026
在Ubuntu20.04系統(tǒng)中訓練神經(jīng)網(wǎng)絡模型的一些經(jīng)驗
基于全局預測歷史的gshare分支預測器的實現(xiàn)細節(jié)
晶圓切割深度動態(tài)補償?shù)闹悄軟Q策模型與 TTV 預測控制
電磁軌跡預測分析系統(tǒng)軟件全面解析
采用可更新且具區(qū)分度錨點的多模態(tài)運動預測研究
預測性維護實戰(zhàn):如何通過數(shù)據(jù)模型實現(xiàn)故障預警?

端到端自動駕駛多模態(tài)軌跡生成方法GoalFlow解析



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論