") 機(jī)器人視覺抓取問題出現(xiàn)的原因和解決方法
機(jī)器人視覺抓取問題出現(xiàn)的原因和解決方法

最近視覺抓件系統(tǒng)一直會出現(xiàn)抓取零件不到位的問題.下面我將分析一下問題出現(xiàn)的原應(yīng).
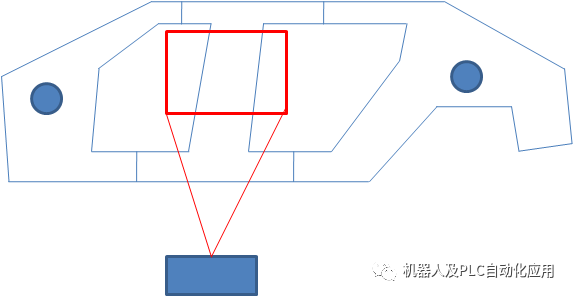
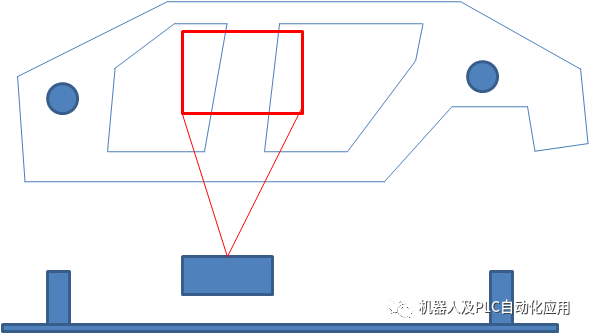
單相機(jī)測點(diǎn),測量車身側(cè)圍外板B /內(nèi)板B,計(jì)算出的車身整體偏差值是B柱的旋轉(zhuǎn)和變化量.因此對于車身整體的變化量存在偏差.零件大的組裝件容易出現(xiàn)這種問題.因此要區(qū)分對待側(cè)圍內(nèi)板和側(cè)圍外部的抓取視覺的計(jì)算方法.
1.車身側(cè)圍內(nèi)板:
應(yīng)設(shè)置兩個(gè)相機(jī)對應(yīng)機(jī)器人抓手上的定位銷附近,計(jì)算兩個(gè)定位空的偏差值.由于機(jī)器人抓手是固定的所以,要計(jì)算出兩空的變化對應(yīng)車身坐標(biāo)系的整體變化值.這樣計(jì)算出的機(jī)器人BASE坐標(biāo)系下的偏差值最準(zhǔn)確,機(jī)器人的抓取效果最好。
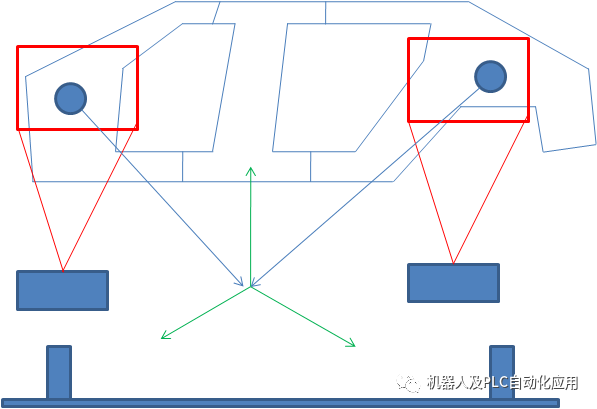
如果機(jī)器人抓手不使用定位銷定位,則可以使用一個(gè)相機(jī)的方法進(jìn)行粗略抓取,問題會很少。
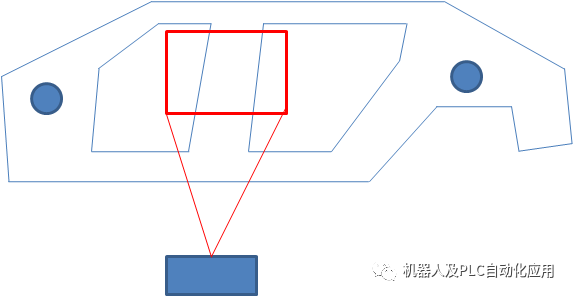
2.車身側(cè)圍外板:
側(cè)圍外板是一個(gè)整體件,用一個(gè)相機(jī)照車身B柱是沒有問題的.整體大件由于不需要搭接工藝,因此可以使用一個(gè)相機(jī)和定位銷定位抓取的方法.
審核編輯:郭婷
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31095瀏覽量
222360 -
相機(jī)
+關(guān)注
關(guān)注
5文章
1585瀏覽量
55821
原文標(biāo)題:機(jī)器人視覺抓取問題分析
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機(jī)器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
3D視覺引導(dǎo)拆碼垛:一文讀懂“機(jī)器眼”如何指揮機(jī)器人搬貨?

解鎖“試管自動抓取搬運(yùn)”新紀(jì)元:富唯智能復(fù)合機(jī)器人重塑精準(zhǔn)物流

如何使用機(jī)器人分析儀EtherCAT-Analyzer抓取主從站數(shù)據(jù)?

變焦、高速、高清:索尼FCB-ER9500機(jī)芯如何重塑機(jī)器人視覺
RK3576機(jī)器人核心:三屏異顯+八路攝像頭,重塑機(jī)器人交互與感知
15分鐘快速部署,復(fù)合機(jī)器人如何重塑“上下料機(jī)器人哪家好”的行業(yè)答案

機(jī)器人競技幕后:磁傳感器芯片激活 “精準(zhǔn)感知力”
工業(yè)機(jī)器人的特點(diǎn)
盤點(diǎn)#機(jī)器人開發(fā)平臺
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】視覺實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門的引路書
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】+ROS2應(yīng)用案例
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開源六軸機(jī)械臂產(chǎn)品
富唯智能最小復(fù)合機(jī)器人的強(qiáng)大抓取實(shí)力?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論