 EB定位解決方案在高度自動駕駛中的使用
EB定位解決方案在高度自動駕駛中的使用

使用高清地圖數據的高度自動駕駛系統的一個主要先決條件是了解車輛的位置。這個位置需要比單獨使用 GNSS 傳感器具有更高的精度。因此,可以使用陀螺儀或里程計等各種其他傳感器系統來增強位置估計。該貢獻描述了一個使用另一個輸入 ADASISv3 地圖數據來改進定位的系統。地圖數據從地圖數據庫接收,然后與來自攝像系統的交通標志測量值進行比較。
使用定位數據進行定位
EB 定位解決方案在其 EB robinos 定位產品中使用 LbL 數據。該定位產品獲取所有可用的定位信息,例如 GPS 和車輪刻度,并嘗試將它們組合到可能的最佳位置。此外,它試圖通過相應的數學建模來降低每個傳感器的個體噪聲。結果是改進的全局位置和表示為從驅動開始的累積增量運動的局部位置。
由于這種測量的低頻特性,LbL 測量作為連續定位的校正值集成在這個整體定位系統中。每次將 LbL 定位(包括表示為方差的置信度估計)轉移到整體定位時,都會通過更新整體定位來計算和校正連續定位的誤差。
藍色標記代表由 ADASISv3 數據提供的地標位置,紅色標記顯示 LbL 系統相對于車輛位置測量這些地標的位置。這些標記之間的偏移表明定位系統中已經存在累積的定位誤差。系統本身估計它位于灰色汽車的位置,但綠色汽車顯示的是在將 LbL 測量的校正添加到整體定位后進行定位的位置。
實驗結果
為了驗證系統功能,LbL 系統安裝在 EB 的一輛測試車輛中。它在德國不倫瑞克附近的 A391 高速公路上進行了測試。在這些試駕期間,記錄了來自高精度 GPS 系統的位置和來自 LbL 系統的位置。
一輛 2014 年大眾高爾夫 7,它配備了來自 OxTS 的差分 GPS 慣性測量單元 RT3003,作為參考傳感器。安裝的攝像系統是 Mobile Eye 630 型。它通過 CAN 總線提供交通標志測量。此外,定位系統使用車輛傳感器來檢測車輛主 CAN 總線上的車輪刻度和陀螺儀。由于作者未能直接從主要地圖提供商的數據庫中獲取交通標志信息(數據將于 2019 年晚些時候提供),因此參考數據是從航拍圖像中測量的。
如圖 7 所示,定位輸出系統的兩次測量之間的通常創新遠低于 0.5m。然而,在大約 2.9 秒時,創新提高到大約 2.5m。在這個時間點,來自交通標志相機的測量被認為是為了校正車輛的位置。如第 5 節中的場景所述,當車輛以大約 80 公里/小時的速度行駛時,車輛檢測到兩個交通標志并將它們與地圖數據庫中的兩個交通標志進行匹配。兩個交通標志在不同的縱向位置被檢測到,即使標志如圖 5 所示對齊。在本文冷靜的時候,無法確定相機是否真的檢測到不同位置的標志,或者是否存在延遲。公共汽車造成了位置的差異。

圖 7. 包含交通標志在 2.992 s 校正的定位系統的創新。
在圖 8 中,繪制了 LbL 測量對單個位置變量的影響。藍線代表純粹基于內感受傳感器的定位系統的位置。GPS噪聲的影響可以從這條線的抖動中看出。LbL 系統以橙色表示。一旦 LbL 在大約 6 秒時測量到一個位置,它對整體位置的影響是可見的,因為可以觀察到藍線中的校正。
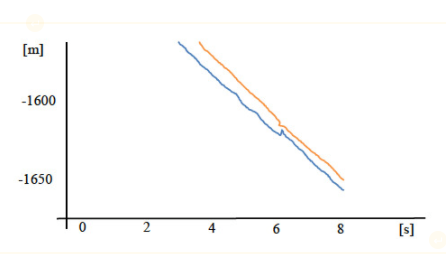
圖 8. LbL 測量在大約 6 秒時的影響。
綠色汽車代表在沒有 LbL 校正的情況下定位會自行定位的位置。紅色汽車顯示了 LbL 本地化發生的地方。灰色汽車表示應用了基于 LbL 的位置校正后汽車自身定位的位置。
結論
基于地理參考地標的外部定位系統可以減少這些地標可用的絕對誤差。通過這一貢獻,作者展示了如何使用通過 ADASISv3 交付的數據來實施此類系統的概念證明。此外,它還描述了系統如何在這個時間點直接使用高清地圖數據庫。交通標志的參考數據很可能很快就會可用,并且可以替換手動獲取的交通標志位置。
該貢獻概述了 LbL 系統的處理鏈。然后將該系統與真實世界的數據一起使用,并且可以顯示測量數據的影響。
在 GPS 不可用且內部感知傳感器會產生漂移的情況下,使用地標進行定位可以改進定位軟件組件。
這一概念驗證的開發將在 EB robinos 定位產品中繼續進行。目前,EB 為汽車級定位提供了一個功能齊全的定位軟件組件,該組件基于車輪刻度、加速度計和其他感知傳感器以及用于全球定位的 GPS。該產品的下一代還將包括基于地標的定位以及基于 SLAM 的點云(例如來自 LIDAR 或相機)。
審核編輯:郭婷
-
傳感器
+關注
關注
2576文章
55041瀏覽量
791356 -
gps
+關注
關注
22文章
3029瀏覽量
173536 -
GNSS
+關注
關注
9文章
990瀏覽量
51154
發布評論請先 登錄
Elektrobit與Mobileye合作打造自動駕駛解決方案
如何設計好自動駕駛ODD?
自動駕駛BEV Camera數據采集系統:高精度時間同步解決方案

汽車自動駕駛的太陽光模擬應用研究

太陽光模擬器 | 在汽車自動駕駛開發中的應用
行深智能推出基于地平線征程6M的L4級自動駕駛解決方案
低速自動駕駛與乘用車自動駕駛在技術要求上有何不同?

自動駕駛汽車在隧道、山區如何精準定位?

自動駕駛汽車是如何準確定位的?

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

自動駕駛安全基石:ODD
激光雷達在自動駕駛領域中的優勢

新能源車軟件單元測試深度解析:自動駕駛系統視角




 工商網監
工商網監
評論