") 自動駕駛的眼睛:基于高質量圖像成像的視覺雷達
自動駕駛的眼睛:基于高質量圖像成像的視覺雷達

/ 導讀 /
2021年10月25日,特斯拉市值站上萬億美金,成為美股第五家市值破萬億的企業(yè),幾乎超過美股全部主要車企市值的總和。特斯拉在資本市場的成功,刺激著投資者的神經,也促使市場再一次將視野聚焦在自動駕駛領域,進一步思考自動駕駛技術路線的發(fā)展方向。
本文希望從技術角度客觀分析和回答以下問題:自動駕駛等級提升需要解決什么關鍵問題?怎樣的自動駕駛方案更加具有實現大規(guī)模無人駕駛的可能性?自動駕駛作為現實世界的AI問題,難點在哪里?以上問題促使我們理性客觀地思考該如何去實現自動駕駛——這一承載了太多期望、不斷挑撥大眾神經的技術生產力變革,從而推動行業(yè)冷靜且務實地向前發(fā)展。
自動駕駛的眼睛:
基于高質量圖像成像的視覺雷達
隨著自動駕駛等級的不斷提高,控制權和責任主體逐漸從駕駛員轉換為車輛,智駕系統(tǒng)的定位也將由擴增人的感知能力到接管車輛自主駕駛。由此對智駕系統(tǒng)之于物理世界環(huán)境理解的要求完全不同,將由對物理世界部分信息的提取提升到事無巨細的全面感知與理解。而這種變化,首要就是對2D圖像成像與3D建模的越來越高的要求:1)更高分辨率和環(huán)境適應度的2D圖像成像;2)對物理世界準確且稠密的實時3D建模。
Camera是自動駕駛感知物理世界最重要的傳感器,其分辨率的提升將極大的提升圖像的信息承載量,使得自動駕駛系統(tǒng)能夠感知更加細節(jié)和更遠距離的行車環(huán)境。當前主流自動駕駛前視攝像頭的分辨率已經到800萬像素以上,而更高的分辨率也是未來必然發(fā)生的事情。自動駕駛汽車面臨的是一個開放性的外部環(huán)境,除了分辨率的提升,還需要提升自動駕駛在各種行車路況下的圖像成像質量,比如不同的光線環(huán)境,傍晚、夜晚等,不同的氣候環(huán)境,雨雪霧天等。相對于傳統(tǒng)汽車應用的車載成像,自動駕駛對于車載成像質量的要求將極大提升,如何通過成像計算獲取更高質量的圖像就成為一個要解決的關鍵性問題。
自動駕駛汽車在三維物理世界中運行,必然要求對物理世界進行更加深刻的三維理解。當前的高級別輔助駕駛在道路上不斷出現各種各樣的事故,這些事故的發(fā)生很大程度上是由于沒有識別到未被樣本庫所覆蓋的異形、非標等物體,比如一輛拉著一棵樹的貨車等,而這些corner case是無法被窮盡的。對于行車環(huán)境的實時稠密3D建模不僅可以識別異形和非標等物體,還能判斷路面坑洼與起伏,這無疑將大大提升自動駕駛的安全級別。當前自動駕駛的3D環(huán)境感知,主要依賴激光雷達等主動投射測量裝置,但其在分辨率上遠低于Camera,也不具備顏色信息。隨著深度學習的發(fā)展,單目深度估計、雙目立體視覺、SFM、MVS等問題已經可以被深度神經網絡所建模,從而可以基于多目視覺通過AI的方法實時生成3D點云,其視覺點云天然與圖像對齊,并且其分辨率也能達到圖像分辨率的級別。因此,如何通過多目視覺實現高分辨率的實時稠密3D建模,即視覺雷達,是另外一個要解決的關鍵性問題。
視覺傳感器的信息承載量極高,目前遠未被充分挖掘,但無論2D圖像成像還是實時稠密3D建模都需要強有力的算法和算力進行支撐,這需要算法和算力進行協同設計。視覺傳感器+算力+算法的傳感器計算模式,將更加本質的推動解決自動駕駛當前面臨的關鍵問題,即從2D和3D層面對物理世界進行事無巨細的感知與理解。
鑒智機器人核心團隊擁有超過十年的圖像處理、AI算法和算力設計的行業(yè)經驗,將以視覺傳感器為核心,通過解決車載ISP、視覺雷達等視覺傳感器2D、3D成像的核心問題,打造更加強大的自動駕駛之眼,從而推動自動駕駛安全等級的提升。
1.1 從手機ISP到車載ISP
ISP(Image Signal Processor)是指通過一系列數字圖像處理算法完成對數字圖像的成像處理。在攝像機成像的整個環(huán)節(jié)中,ISP負責接收感光元件的原始信號數據,可以理解為整個攝像機圖像輸出的第一步處理流程。ISP在提高圖像質量、增強數據的一致性等方面有著極其關鍵的作用。
得益于智能手機的發(fā)展和手機攝像頭像素越來越高,手機ISP在過去幾年得到了快速的發(fā)展和進步,手機拍照和錄像的質量也越來越高,甚至到了驚艷的地步。比如在夜晚等場景,可以拍到比人眼看到的更清晰、光照更充足、色彩更豐富的照片;比如在進出隧道等光照變化劇烈的場景,也可以錄制出比人眼表現更穩(wěn)定、更清晰的視頻。這些效果除了源于手機攝像頭硬件上的升級,專門的AI ISP處理算法和處理芯片也起到了至關重要的作用。
隨著自動駕駛對車載成像質量的階躍式提升需求,車載ISP,特別是針對駕駛場景優(yōu)化的AI ISP處理算法和處理芯片,將迎來爆發(fā)式的發(fā)展。AI在車載ISP整個流程中將變得越來越重要,特別是在降噪、去模糊、HDR等問題上,可以在夜晚、陽光直射、進出隧道等暗光、強光、高動態(tài)場景得到遠超人眼的成像效果,同時最大程度上解決由Sensor引起的噪點、模糊等問題。將AI計算前置在ISP計算Pipeline中,通過流式計算,使得ISP的計算Pipeline不被打斷,也將大大提升AI ISP的性能功耗比。
鑒智機器人擁有全鏈路的芯片級ISP IP的設計能力,將解決ISP特別是AI ISP在車載場景的核心問題,讓車載攝像頭成像更清晰,從而進一步提高視覺雷達點云生成和圖像語義感知等后續(xù)任務的準確性。
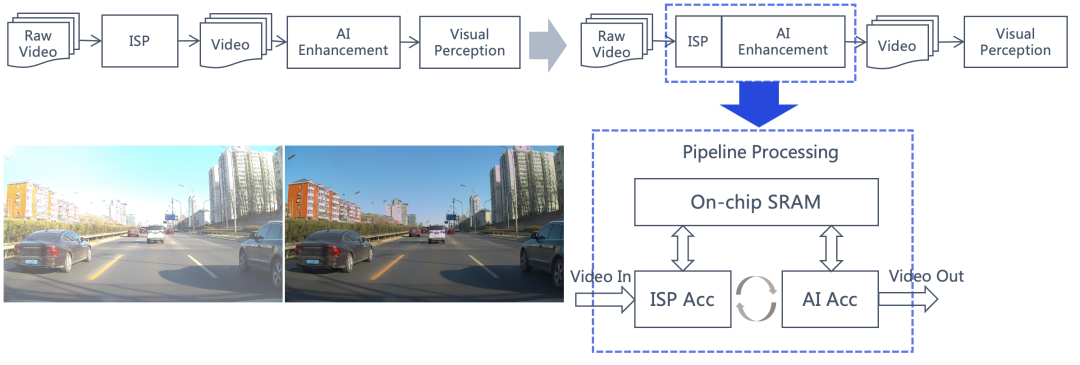
圖1:鑒智機器人擁有全鏈路的ISP算法和算法硬核化設計能力
1.2 從2D感知到視覺雷達
面對大規(guī)模自動駕駛,對3D點云的信息稠密程度、場景泛化性、性能可擴展性方面提出了更高的要求。基于視覺雷達,通過雙目或者多目立體視覺計算,產生實時稠密的3D點云是更優(yōu)的方式。
雙目立體視覺是機器視覺的一種重要形式,與人眼類似,它是基于視差原理,通過計算圖像對應點間的位置偏差,來獲取物體三維幾何信息的方法,和基于TOF、結構光原理的深度相機不同,它不對外主動投射光源,完全依靠拍攝的兩張圖片(彩色RGB或者灰度圖)來計算深度。
傳統(tǒng)的雙目立體匹配算法針對弱紋理、反光等區(qū)域效果比較差,同時對于物體語義信息利用比較少,算法適用范圍具有局限性,點云效果上限比較明顯。隨著深度學習技術的發(fā)展,基于CNN、Cost Volume、Transformer的立體匹配算法展現出來了極強的算法效果和潛力。目前知名自動駕駛數據集KITTI上的立體匹配任務排名靠前的基本都是基于深度學習的算法。基于深度學習的雙目立體匹配算法對于計算芯片的AI算力提出了比較高的要求,對于研發(fā)模式也提出了新的要求,需要從傳統(tǒng)的雙目相機研發(fā)模式變成以AI為核心、軟硬結合、數據驅動的研發(fā)模式。
從雙目立體視覺更進一步,充分利用相機的運動信息和多個相機間的幾何約束,通過相機姿態(tài)估計、深度估計、光流估計、MVS等算法,以及任務之間互相監(jiān)督的一系列自監(jiān)督算法,可以得到360度的點云數據,也就是視覺雷達,從而形成與圖像分辨率相匹配的稠密點云。同時,以攝像頭+算力+算法為核心的視覺雷達,還具有產業(yè)鏈成熟可控、成本可控、器件穩(wěn)定性有保證、滿足車規(guī)等優(yōu)勢,更容易實現大規(guī)模前裝量產上車使用。
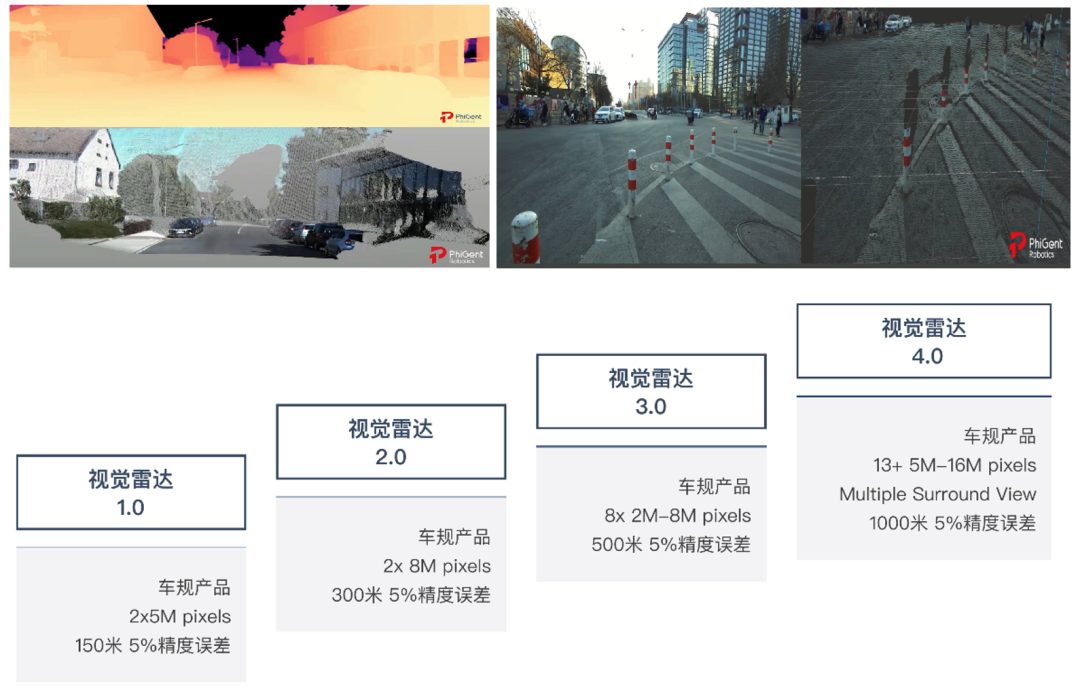
圖2:鑒智機器人視覺雷達Roadmap
自動駕駛的大腦: 全流程數據驅動的強單車智能
自動駕駛的大腦負責從感知到決策的駕駛全流程,也是自動駕駛最復雜、最核心和難度最高的部分。傳統(tǒng)的以規(guī)則為核心的軟件1.0工程化系統(tǒng),在可維護性、擴展性和進化性上都具有一定的局限性。以AI和軟件2.0為核心,全流程數據驅動的感知、預測、規(guī)控算法和強單車智能的解決方案,無疑是實現大規(guī)模無人駕駛更可行的方案。
鑒智機器人核心團隊在AI算法和應用、軟件2.0的基礎設施、數據驅動的大規(guī)模實踐上擁有豐富的經驗,將通過全流程數據驅動的自動駕駛大腦,建立強單車智能,從而降低對外部基礎設施的依賴,更加利于自動駕駛的復制與推廣。
2.1 深度學習帶來的2D感知技術突破
感知是自動駕駛獲取信息的第一步, 所謂感知是指通過攝像頭或其他傳感器識別所看到的物體并理解該物體是什么,這對自動駕駛是至關重要的環(huán)節(jié)。自動駕駛車輛首先是要識別車道線,然后還要識別紅綠燈、標志牌,除此之外就是識別障礙物比如前后左右有沒有車輛,有沒有行人,才能夠進一步規(guī)劃行駛路線。
過去十年是人工智能技術的黃金十年,深度學習改變了計算機視覺整個領域,也帶來了2D感知各個方向技術的突破。2D感知主要有圖像分類、圖像(物體)識別、細粒度識別(人臉識別)等方向,所采用的技術也從最早的模板匹配、線性分類到現在所廣泛使用的深層卷積神經網絡,再到最近刷新各大視覺任務榜單的Transformer。隨著硬件計算能力的不斷提升、算法范式的不斷改進、可利用數據資源的不斷增長,基于攝像頭的2D感知已經成為了乘用車智能駕駛的主流方案,同時也成為了很多解決方案的核心差異點。
鑒智機器人核心團隊在國內最早基于深度學習在2D視覺感知各個方向開展系統(tǒng)性研究和大規(guī)模落地應用,在眾多全球最具影響力的2D感知AI比賽和評測中獲得冠軍,發(fā)表頂級會議和期刊論文幾十余篇,在多個業(yè)務領域實現了人工智能2D感知技術的大規(guī)模應用落地。

(a)目標檢測、人體骨骼點

(b)全景分割

(c)360°視覺感知

(d)單目
測距
圖3:鑒智機器人在2D感知方向具有世界一流的核心能力 2.2 從2D感知到4D感知
如果說2D感知還是在平面上檢測、識別、分割物體,那么加入深度信息后,基礎的2D感知即轉化為3D感知。如果進一步在3D的基礎上加入時間這一維度,進化得到的則是4D感知。在自動駕駛領域,4D感知可以完整且連續(xù)的探測車輛周圍的物體。
基于深度學習和三維視覺技術不斷發(fā)展,隨著Cost Volume、Optical Flow、differentiable Homography、Transformer等技術的成熟,以及多傳感器融合、眾包重建、稠密重建、自動標注等方向不斷發(fā)展,可以高效率的提供高質量、大規(guī)模的4D場景數據,端到端的4D感知正在成為技術趨勢。相比于傳統(tǒng)的2D感知+后融合的方案,端到端的4D感知擁有很多優(yōu)勢,可以解決測距抖動較大、多攝像頭拼接不準確、時序結果不穩(wěn)定、迭代效率較低等一系列問題。
更進一步,基于端到端的4D感知,可以進行更好的4D預測,一方面可對于交通參與者進行更優(yōu)的運動軌跡預測,從而實現性能更加優(yōu)異的規(guī)劃控制;另一方面可對于道路行駛區(qū)域預測更加精細的3D結構化信息,在線生成局部實時3D地圖,降低對高精地圖等基礎設施的依賴。
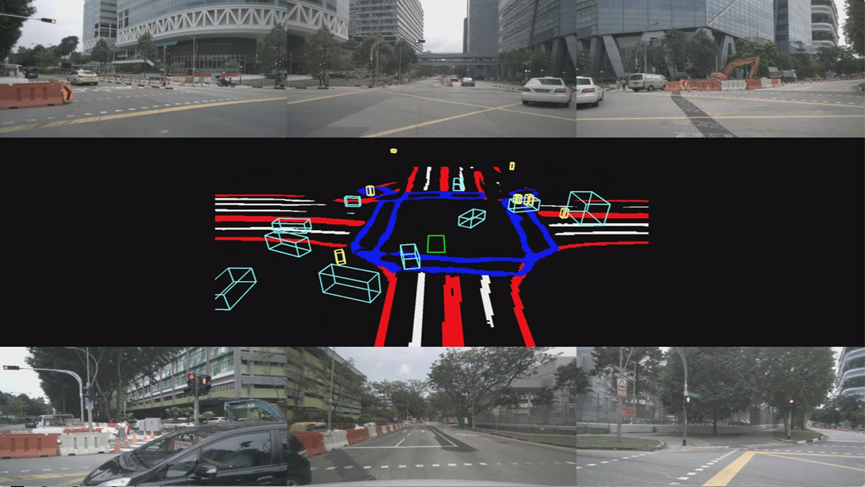
圖4:鑒智機器人針對復雜路口駕駛場景的4D感知結果
自動駕駛被認為是目前最重要的硬科技創(chuàng)新之一。在汽車行業(yè)百年未有之大變革的歷史性時刻,中國由于在電動汽車領域的提前布局、全面開花,以及完整產業(yè)鏈的巨大優(yōu)勢,國內企業(yè)在自動駕駛方向擁有非常好的機會和產業(yè)優(yōu)勢,有機會通過電動化和智能化實現百年汽車工業(yè)這一最重要的支柱產業(yè)的超車和領先。但自動駕駛的發(fā)展速度仍然低于大眾和市場的預期,這里存在若干影響自動駕駛等級提升的關鍵性問題亟待解決,鑒智機器人基于自身在AI算法、AI算力層面的積累,致力于解決自動駕駛成像計算和下一代自動駕駛方案的關鍵性問題,從而推動自動駕駛的創(chuàng)新發(fā)展。
審核編輯 :李倩
-
傳感器
+關注
關注
2576文章
55041瀏覽量
791360 -
雷達
+關注
關注
52文章
3328瀏覽量
123909 -
自動駕駛
+關注
關注
793文章
14883瀏覽量
179900
原文標題:通過傳感器計算打造視覺雷達,下一代自動駕駛系統(tǒng)的關鍵構成
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
純視覺自動駕駛的優(yōu)勢和劣勢有哪些?

如何設計自動駕駛傳感器失效檢測與容錯策略?
自動駕駛中毫米波雷達到底有何作用?

沒有地圖,純視覺自動駕駛就只能摸瞎嗎?

恩智浦4D成像雷達如何助力自動駕駛發(fā)展
索尼重載設備的高質量遠程制作方案和應用(2)

決定自動駕駛激光雷達感知質量的因素有哪些?

什么是自動駕駛數據標注?如何好做數據標注?

自動駕駛汽車是如何準確定位的?

純視覺的自動駕駛會有哪些安全問題?

自動駕駛中純視覺替代不了激光雷達?
自動駕駛激光雷達之間會相互干擾嗎?
激光雷達在自動駕駛領域中的優(yōu)勢

愛普生高精度車規(guī)晶振助力激光雷達自動駕駛

激光雷達技術:自動駕駛的應用與發(fā)展趨勢




 工商網監(jiān)
工商網監(jiān)
評論