") GitHub上的機(jī)器學(xué)習(xí)核心存儲(chǔ)庫和運(yùn)動(dòng)
GitHub上的機(jī)器學(xué)習(xí)核心存儲(chǔ)庫和運(yùn)動(dòng)

ST 在?? GitHub 上發(fā)布了其機(jī)器學(xué)習(xí)核心存儲(chǔ)庫,其中包含示例和配置文件,以極大地改善開發(fā)人員的體驗(yàn)。眾所周知,人工智能非常困難,因?yàn)樗蕾囉跀?shù)據(jù)科學(xué)。此外,創(chuàng)建正確的算法(例如決策樹)并對(duì)其進(jìn)行設(shè)置也很棘手。不幸的是,所有這些問題往往會(huì)限制可以輕松開始研究機(jī)器學(xué)習(xí)應(yīng)用程序的工程師數(shù)量。因此,我們?cè)?GitHub 上發(fā)布了一個(gè)存儲(chǔ)庫來解決這個(gè)問題。該軟件包包括數(shù)據(jù)日志子集以及LSM6DSOX、LSM6DSRX、ISM330DHCX、IIS2ICLX的應(yīng)用程序和配置示例慣性傳感器。它已經(jīng)為使用它開發(fā)商業(yè)解決方案的主要 ST 客戶提供服務(wù)。因此,我們認(rèn)為我們社區(qū)的其他成員可以從中受益。
使機(jī)器學(xué)習(xí)更易于訪問的另一種方法
支持的傳感器是獨(dú)一無二的,因?yàn)樗鼈兌加幸粋€(gè)機(jī)器學(xué)習(xí)核心,可以并行運(yùn)行一個(gè)或多個(gè)決策樹。ST 是第一個(gè)提供此類組件的公司,并因此獲得了獎(jiǎng)項(xiàng)。它仍然是獨(dú)一無二的,因?yàn)闄C(jī)器學(xué)習(xí)核心可以以微控制器功耗的一小部分提供決策能力。因此,意法半導(dǎo)體從 2019 年開始推出新器件,例如LSM6DSRX 和 ISM330DHCX ,從而擴(kuò)大了產(chǎn)品范圍。我們還通過發(fā)布Unico-GUI等工具降低了進(jìn)入門檻。該實(shí)用程序提供了一個(gè)圖形界面,有助于數(shù)據(jù)收集和機(jī)器學(xué)習(xí)核心的配置。 因此,GitHub 存儲(chǔ)庫是另一項(xiàng)旨在使機(jī)器學(xué)習(xí)更易于訪問的舉措。任何人都可以簡單地按照軟件包中列出的步驟在幾分鐘內(nèi)測(cè)試應(yīng)用程序。
機(jī)器學(xué)習(xí)核心存儲(chǔ)庫和運(yùn)動(dòng)
健身活動(dòng)
機(jī)器學(xué)習(xí)核心存儲(chǔ)庫中的一個(gè)應(yīng)用示例是在 LSM6DSOX 上運(yùn)行的健身房活動(dòng)識(shí)別。該程序使腕帶能夠自動(dòng)檢測(cè)二頭肌彎舉、側(cè)平舉、深蹲或休息位置之間的情況。然而,用戶必須告訴系統(tǒng)可穿戴設(shè)備是在他們的右手還是左手。有問題的應(yīng)用程序依賴于使用 LSM6DSOX 慣性模塊的腕帶收集的數(shù)據(jù)。ST 用右手和左手的可穿戴設(shè)備收集數(shù)據(jù),現(xiàn)在在存儲(chǔ)庫中提供“左手”數(shù)據(jù)的子集。我們還提供兩個(gè)配置文件,每只手一個(gè)。此外,開發(fā)人員將找到示例來幫助他們?cè)O(shè)計(jì)類似的算法并研究我們應(yīng)用于加速度計(jì)信號(hào)的濾波器。
檢查健身房活動(dòng)識(shí)別應(yīng)用程序
瑜伽姿勢(shì)
另一個(gè)物理應(yīng)用很吸引人,因?yàn)樗赟ensorTile.Box上運(yùn)行,可以識(shí)別 12 個(gè)瑜伽姿勢(shì)以及兩個(gè)非瑜伽站立姿勢(shì)(靜止站立和運(yùn)動(dòng)站立)。可以將設(shè)備連接到用戶的左腿,并使用其強(qiáng)大的傳感器來運(yùn)行具有 20 個(gè)節(jié)點(diǎn)的決策樹。當(dāng)用戶保持一個(gè)姿勢(shì)時(shí),系統(tǒng)可以在不到一秒的時(shí)間內(nèi)檢測(cè)到它。該系統(tǒng)可以區(qū)分木板、兒童姿勢(shì)、向下狗或冥想姿勢(shì)等。該存儲(chǔ)庫還提供來自 UNICO-GUI 的數(shù)據(jù)日志,幫助創(chuàng)建決策樹分類器。系統(tǒng)通過跟蹤加速度計(jì)在 X、Y 和 Z 軸上的平均值來確定姿勢(shì)。
從瑜伽姿勢(shì)應(yīng)用程序中學(xué)習(xí)
機(jī)器學(xué)習(xí)核心存儲(chǔ)庫和運(yùn)動(dòng)檢測(cè)
車輛靜止檢測(cè)
由于更精確的 LSM6DSRX,靜止檢測(cè)算法可以確定汽車是否在移動(dòng)。該應(yīng)用程序使用來自加速度計(jì)和陀螺儀的數(shù)據(jù),并且無論方向如何都能正常工作。GitHub 存儲(chǔ)庫甚至提供了為制作該程序而收集的數(shù)據(jù)日志的一個(gè)子集。此外,我們還提供配置示例以幫助開發(fā)人員研究類似的算法。該示例可幫助初學(xué)者了解一些濾波器如何對(duì)輸入信號(hào)產(chǎn)生重大影響。該配置還顯示了我們?nèi)绾螌?shí)現(xiàn)具有 30 個(gè)節(jié)點(diǎn)的決策樹。ST 在??其嬰兒哭泣檢測(cè)器中使用了類似的算法。 事實(shí)上,行駛中的汽車意味著司機(jī)的存在,這意味著即使嬰兒在哭泣,也無需啟動(dòng)警報(bào),因?yàn)檐噧?nèi)有成人。
探索車輛靜止檢測(cè)應(yīng)用
頭部手勢(shì)
頭部手勢(shì)識(shí)別應(yīng)用程序也使用 LSM6DSRX。耳機(jī)中的傳感器可以確定用戶是否在點(diǎn)頭、靜止、走路、搖頭或搖頭。 ST 使用這種特殊的慣性傳感器為該算法收集了數(shù)據(jù),并提供了一部分?jǐn)?shù)據(jù)日志。該應(yīng)用程序在 X、Y 和 Z 軸上使用來自加速度計(jì)和陀螺儀的數(shù)據(jù)。但是,并非所有數(shù)據(jù)源都接收相同的過濾器。例如,系統(tǒng)僅在 Y 軸上監(jiān)控加速度計(jì)的最大閾值,而在同一傳感元件的 X 軸上尋找最小閾值。因此,它是信號(hào)處理在機(jī)器學(xué)習(xí)應(yīng)用中重要性的一個(gè)很好的例子。此外,決策樹本身非常簡單,只有七個(gè)節(jié)點(diǎn)來檢測(cè)五個(gè)類別。
審核編輯:郭婷
-
微控制器
+關(guān)注
關(guān)注
48文章
8375瀏覽量
164543 -
傳感器
+關(guān)注
關(guān)注
2576文章
55028瀏覽量
791239 -
機(jī)器學(xué)習(xí)
+關(guān)注
關(guān)注
66文章
8553瀏覽量
136928
發(fā)布評(píng)論請(qǐng)先 登錄
機(jī)器視覺的核心技術(shù)和應(yīng)用場(chǎng)景
FSKV核心庫開發(fā)實(shí)戰(zhàn):API詳解與Demo演示

探索RISC-V在機(jī)器人領(lǐng)域的潛力
高精度機(jī)器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運(yùn)動(dòng)控制方案
哈默納科Harmonic精密減速器 工業(yè)機(jī)器人關(guān)節(jié)運(yùn)動(dòng)的核心部件
自制巡線解迷宮機(jī)器人(上)
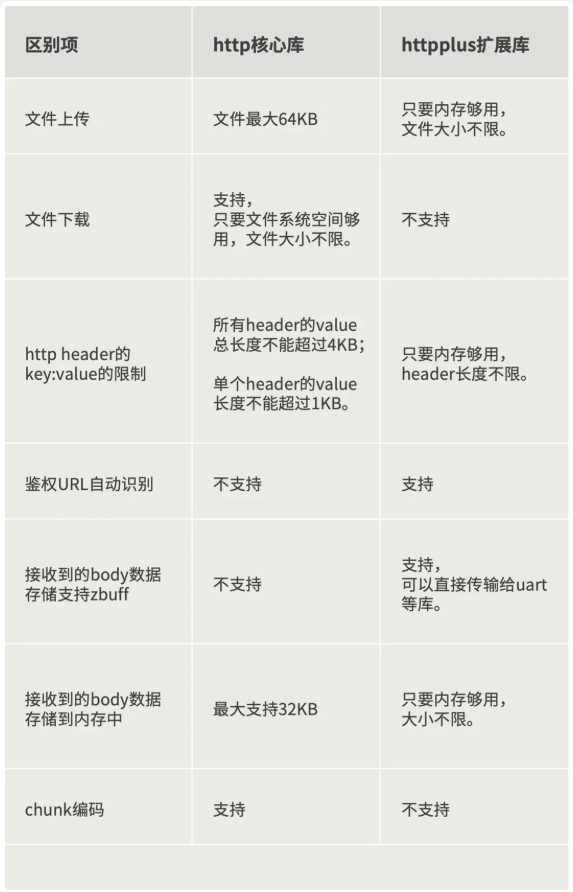
HTTP開發(fā)必備:核心庫與httpplus擴(kuò)展庫應(yīng)用示例全攻略
半導(dǎo)體存儲(chǔ)芯片核心解析
ADI如何重塑人形機(jī)器人運(yùn)動(dòng)核心



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論