 深部目標姿態估計的不確定性量化研究
深部目標姿態估計的不確定性量化研究

NVIDIA 德克薩斯大學,奧斯丁和加州理工學院的研究人員開發了一種簡單、高效、即插即用的不確定性量化方法,用于六自由度(自由度)物體姿態估計任務,使用 K 預先訓練的估計器與不同的體系結構和/或訓練數據源的集合。
研究人員在 2021 年國際機器人與自動化會議( ICRA 2021 )上發表了他們的論文“ 用于深部目標姿態估計的快速不確定性量化( FastUQ ) ”。
FastUQ 主要研究深部目標姿態估計的不確定性量化問題。在基于深度學習的目標姿態估計中(參見 NVIDIA DOPE ),一個很大的挑戰是基于深度學習的姿態估計器 MIG 不能對其姿態預測過于自信。
例如,下面的兩個圖是操縱任務中來自攝影模型的“番茄醬”對象的姿勢估計結果。兩個結果都很有把握,但左一個是不正確的。

解決的另一個挑戰是 sim2real 缺口。通常,基于深度學習的姿態估計器是從合成數據集(由 NVIDIA 的光線跟蹤渲染器 NViSII )中訓練出來的,但是我們希望將這些估計器應用于現實世界并量化不確定性。例如,左圖來自合成 NViSII 數據集,右圖來自真實世界。

在本計畫中,我們提出一種基于集合的方法來快速量化基于深度學習的姿態估計器的不確定性。這一想法在下面兩幅圖中得到了證明,在左邊的圖中,集合中的深層模型彼此不一致,這意味著更多的不確定性;在右圖中,這些模型彼此一致,反映了較少的不確定性。
這項研究絕對是跨學科的,由 NVIDIA 的不同研究團隊共同努力解決:
由 Anima Anandkumar 領導的人工智能算法團隊和西雅圖的 NVIDIA 人工智能機器人研究實驗室正在研究不確定性量化方法
Jan Kautz 領導的學習和感知研究團隊負責訓練深部物體姿態估計模型,并從 NVIDIA 的光線跟蹤渲染器 NViSII 提供真實感合成數據
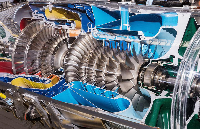
為了訓練深度估計和生成高保真的真實感合成數據集,團隊使用 NVIDIA V100GPU 和 NVIDIA OptiX ( C ++ / CUDA 后端)進行加速。
FastUQ 是一種新的用于深部目標姿態估計的快速不確定性量化方法,具有高效、即插即用的特點,支持一類通用的姿態估計任務。這項研究在自主駕駛和一般自主性方面具有潛在的重大影響,包括更穩健和安全的感知,以及不確定性感知控制和規劃。
關于作者
Yuke Zhu 是 NVIDIA 人工智能算法團隊的研究員。他獲得了碩士和博士學位。斯坦福大學的學位。他的博士學位。論文圍繞閉合感知 - 動作回路,使機器人智能更具普遍性,更適用于控制較少的環境。他的研究處于機器人學、機器學習和計算機視覺的交叉點。他開發了感知和控制的計算方法,產生了智能機器人的行為。通過他的工作,他渴望教會機器人理解周圍的視覺世界并與之互動。他的專業知識得到了各種新聞媒體、領先科技機構和獎項機構的關注。他的作品曾多次獲得獎項和提名,包括 ICRA 2019 年最佳會議論文獎。他的作品曾被麻省理工學院技術評論和斯坦福新聞等媒體報道。
審核編輯:郭婷
-
機器人
+關注
關注
213文章
31246瀏覽量
223107 -
NVIDIA
+關注
關注
14文章
5671瀏覽量
109991 -
人工智能
+關注
關注
1819文章
50193瀏覽量
266344
發布評論請先 登錄
功率放大器在膠滴氣泡質量與一致性分析研究中的應用

戴爾PowerScale文件存儲系統專為數據生命周期靈活性而設計
DP83826:確定性、低延遲、低功耗工業以太網PHY的卓越之選
DP83826Ax工業以太網PHY:確定性、低延遲與低功耗的完美融合
DP83826Ax:確定性、低延遲工業以太網PHY的深度解析
渦輪部件多源不確定性機理與分類體系研究:從幾何變異到認知局限的系統解析
4種神經網絡不確定性估計方法對比與代碼實現

尋跡智行AMR融合RFID識別技術,為柔性搬運注入“確定性"
自動駕駛端到端大模型為什么會有不確定性?

虹科干貨 | 拆解TSN四大支柱:從「盡力而為」到工業實踐的確定性網絡

康謀分享 | 基于多傳感器數據的自動駕駛仿真確定性驗證

無模型自適應控制在永磁同步電機轉速中的仿真研究
應用分享 | 精準生成和時序控制!AWG在確定性三量子比特糾纏光子源中的應用



 工商網監
工商網監
評論