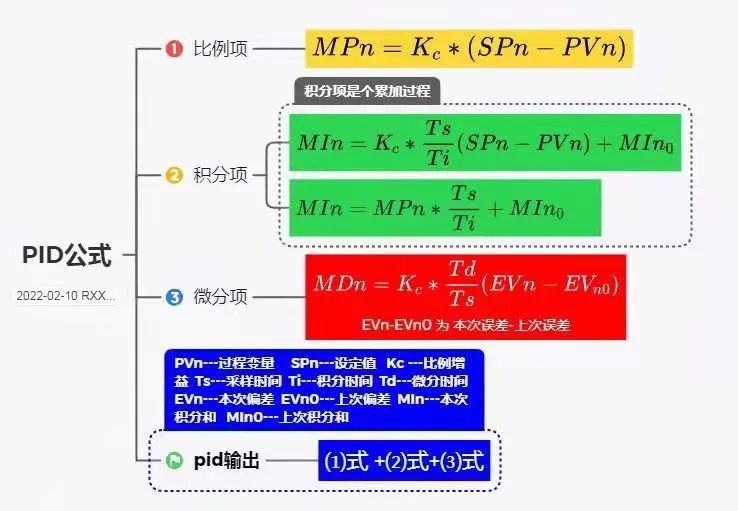
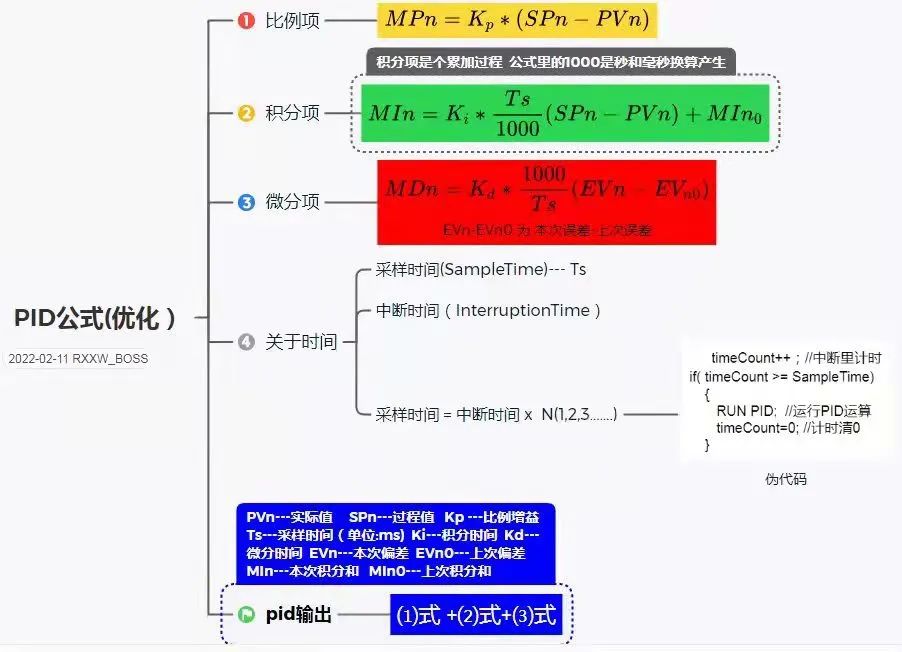
") PID控制算法公式
PID控制算法公式

聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
PID
+關(guān)注
關(guān)注
38文章
1499瀏覽量
91192 -
控制算法
+關(guān)注
關(guān)注
4文章
171瀏覽量
22744
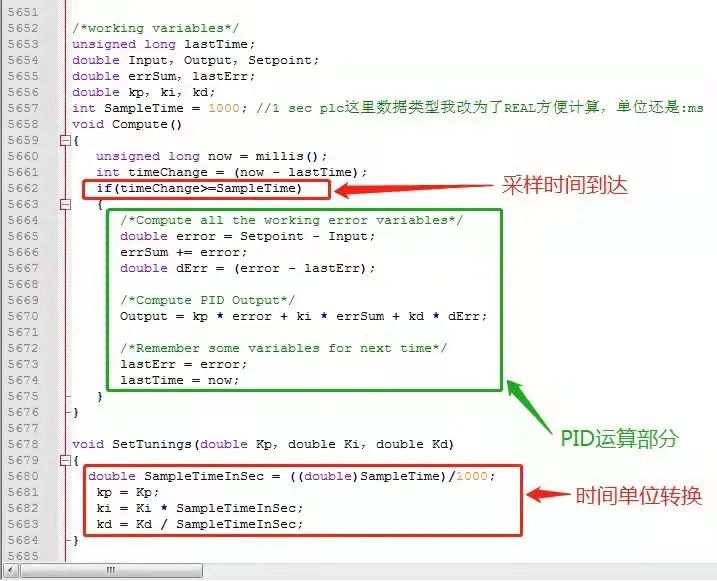
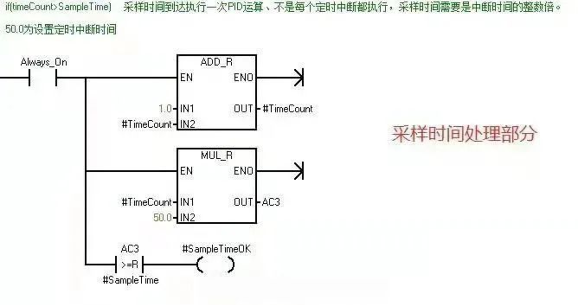
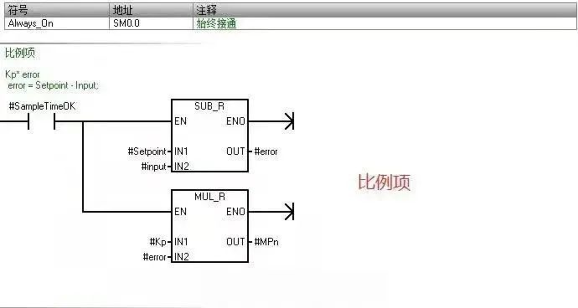
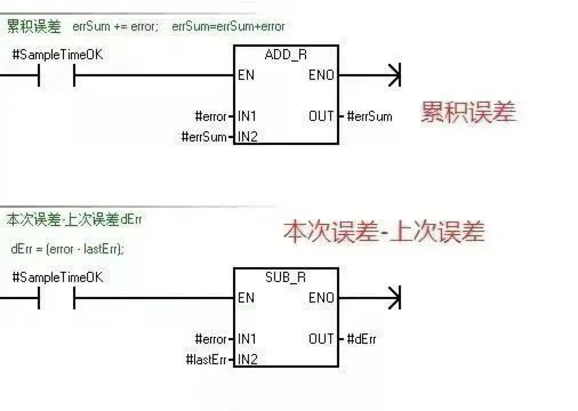
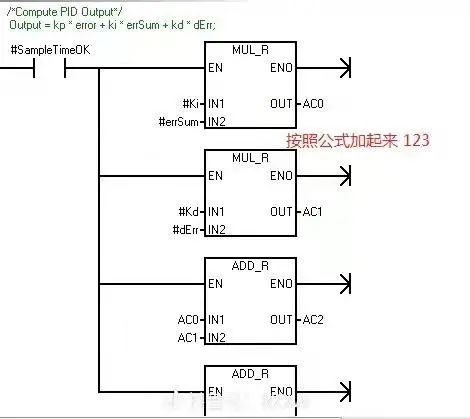
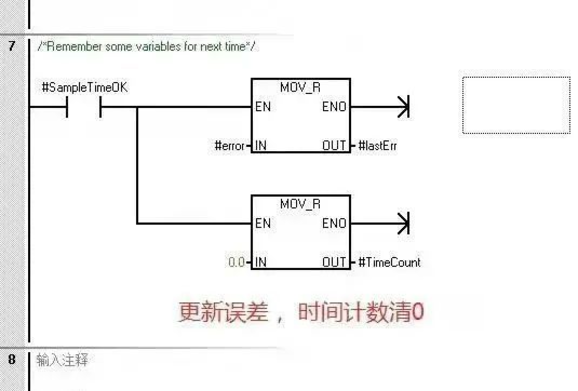
原文標(biāo)題:PID控制算法如何通過(guò)C語(yǔ)言和梯形圖實(shí)現(xiàn)
文章出處:【微信號(hào):gkongbbs,微信公眾號(hào):工控論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
PID控制的算法
PID及其衍生算法是應(yīng)用最廣泛的算法之一,是當(dāng)之無(wú)愧的萬(wàn)能算法,如果能夠熟練掌握PID算法的設(shè)計(jì)
發(fā)表于 01-23 08:18
C語(yǔ)言的PID算法
.Ki = 0.015;
pid.Kd = 0.2;
printf(\"PID_init end n\");
}
//編寫(xiě)控制算法
//位置式
發(fā)表于 01-16 08:13
C語(yǔ)言增量式PID的通用算法
C語(yǔ)言增量式PID通用算法控制算法中PID使用的非常廣泛,但是在網(wǎng)上找代碼的時(shí)候發(fā)現(xiàn)好多代碼都不夠通用,需要自己改好多東西,而且當(dāng)一個(gè)項(xiàng)目需
發(fā)表于 01-14 08:28
CW32L012的PID溫度控制——算法基礎(chǔ)
PID 控制算法是比例(Proportional)- 積分(Integral)- 微分(Derivative) 控制的簡(jiǎn)稱,是工業(yè)控制、嵌入
怎樣理解變頻器內(nèi)置PID控制參數(shù)的含義
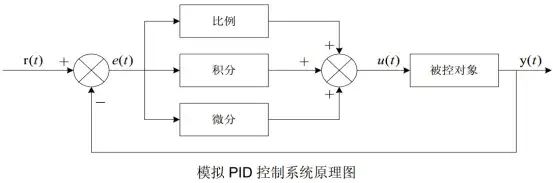
應(yīng)用三個(gè)維度展開(kāi)分析。 一、PID控制的基本原理與變頻器實(shí)現(xiàn) PID(比例-積分-微分)控制是一種通過(guò)誤差反饋實(shí)現(xiàn)系統(tǒng)調(diào)節(jié)的經(jīng)典算法。在變頻
PID調(diào)參實(shí)用方法
一、什么是PID
在工程中,如果我們要用單片機(jī)做一個(gè)溫控系統(tǒng),其系統(tǒng)組成一般如下:一個(gè)采集溫度的ADC,一個(gè)輸出溫度的加熱頭以及一個(gè)用于運(yùn)行控制算法的單片機(jī),如果我們要維持溫度為100度,在不加任何
發(fā)表于 11-28 07:17
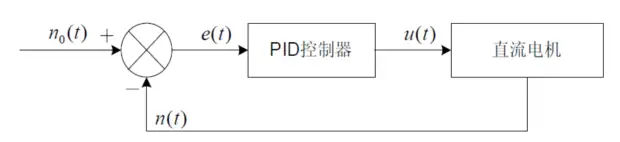
CW32電機(jī)控制基礎(chǔ)——PID控制原理
將偏差的比例(Proportion)、積分(Integral)和微分(Differential)通過(guò)線性組合構(gòu)成控制量,用這一控制量對(duì)被控對(duì)象進(jìn)行控制,這樣的控制器稱
明晚!基于RT-Thread 的 PID 控制實(shí)踐,從驅(qū)動(dòng)到算法到監(jiān)控,一次學(xué)會(huì)!| 問(wèn)學(xué)直播
在嵌入式開(kāi)發(fā)中,PID控制是最常見(jiàn)、最實(shí)用的控制算法之一,應(yīng)用場(chǎng)景涵蓋溫度控制、電機(jī)調(diào)速、機(jī)械臂控制

PID串級(jí)控制在同步發(fā)電機(jī)勵(lì)磁控制中的應(yīng)用
摘 要:為提高發(fā)電機(jī)勛磁控制系統(tǒng)的穩(wěn)定性,分析了同步發(fā)電機(jī)的自并勵(lì)勵(lì)磁系統(tǒng)的結(jié)構(gòu)和數(shù)學(xué)模型,介紹了神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)控制的結(jié)構(gòu)和算法,分別基于PID控制
發(fā)表于 06-16 21:56
掃描電機(jī)的PID恒速控制仿真及實(shí)驗(yàn)
數(shù)學(xué)模型,并通過(guò) Matlab Simulink 搭建了仿真模型。提出了使用增量式PID控制算法實(shí)現(xiàn)電機(jī)的恒速控制,并進(jìn)行了仿真,最后,利用STC89C52將
發(fā)表于 06-16 21:53
改進(jìn)粒子群算法的永磁同步電機(jī)PID控制器
采用粒子優(yōu)化算法進(jìn)行PID模糊控制訓(xùn)練能提高永磁同步電機(jī)的控制精度,提出一種基于改進(jìn)粒子群算法的永磁同步電機(jī)
發(fā)表于 05-28 15:44
改進(jìn)的BP網(wǎng)絡(luò)PID控制器在無(wú)刷直流電機(jī)中的應(yīng)用
通過(guò)分析學(xué)習(xí)速率對(duì)BP算法的影響,提出一種分層調(diào)整學(xué)習(xí)速率的改進(jìn)BP 網(wǎng)絡(luò)算法,并把該方法設(shè)計(jì)成 PID控制器應(yīng)用在無(wú)刷直流電機(jī)控制系統(tǒng)中,
發(fā)表于 05-28 15:42
【RA-Eco-RA4M2開(kāi)發(fā)板評(píng)測(cè)】2.907電烙鐵加入PID調(diào)節(jié)
PID原理
PID 控制器以各種形式使用,廣泛應(yīng)用在機(jī)械設(shè)備、氣動(dòng)設(shè)備 和電子設(shè)備.在工業(yè)應(yīng)用中PID及其衍生算法是應(yīng)用最廣泛的
發(fā)表于 05-14 12:51
永磁同步直線電機(jī)的粒子群PID空間矢量控制
PID 控制器,并通過(guò) MAT- LAB/Simulink 對(duì)永磁同步直線電機(jī)和其空間矢量控制系統(tǒng)進(jìn)行建模和仿真實(shí)驗(yàn)。仿真結(jié)果表明,采用粒子群優(yōu)化算法的
發(fā)表于 03-27 12:07



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論