 ADAS和自動駕駛中FMCW雷達基礎知識
ADAS和自動駕駛中FMCW雷達基礎知識

1.1 什么是雷達?
雷達(Radio Detection and Ranging 的首字母縮寫詞)使用無線電波來檢測環境中的物體。它允許確定距離(稱為范圍)、角位置(方位)和速度。雷達技術是在二戰期間為軍事用途而開發的,但現在有許多民用應用,包括空中或海上交通管制、天文學、海洋和氣象監測、測高、地質觀測和汽車應用。
雷達系統包括一個發射器,它向某個方向發射電磁射頻波(雷達信號)。然后由雷達接收器檢測從目標物體反射的信號(回波)。反射的幅度由物體的材料屬性、大小和形狀(雷達橫截面 RCS)決定。通過處理這個反射信號,可以確定目標的特性。
1.2 FMCW雷達
汽車雷達系統使用所謂的調頻連續波 (FMCW) 運行。該系統以特定頻率發射連續波,然后在一段時間 T 內對其進行調制。這為發射的信號提供了“時間戳”。信號隨后傳播到目標,其中一部分被反射回來。雷達將檢測反射信號并將其與原始信號進行比較,將它們混合并處理結果信號。簡化示意圖如圖 1 所示。
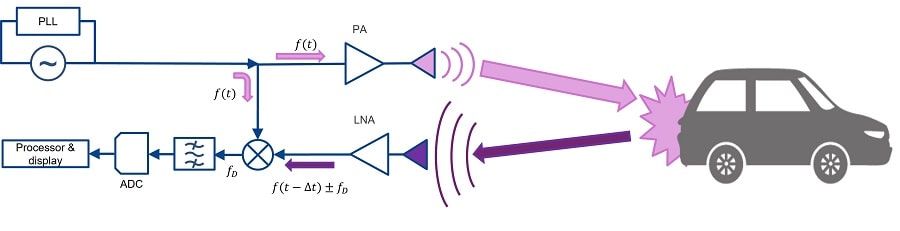
圖 1:FMCW 汽車雷達——原理和構建模塊
圖 2 和圖 3 顯示了這種雷達信號的一個示例。返回的信號在形狀上與發送的信號相似,但隨著從雷達到目標的雙向行程花費時間 Δt,時間上發生了偏移與到目標 R 的距離成正比:
圖像

其中 c 為光速。
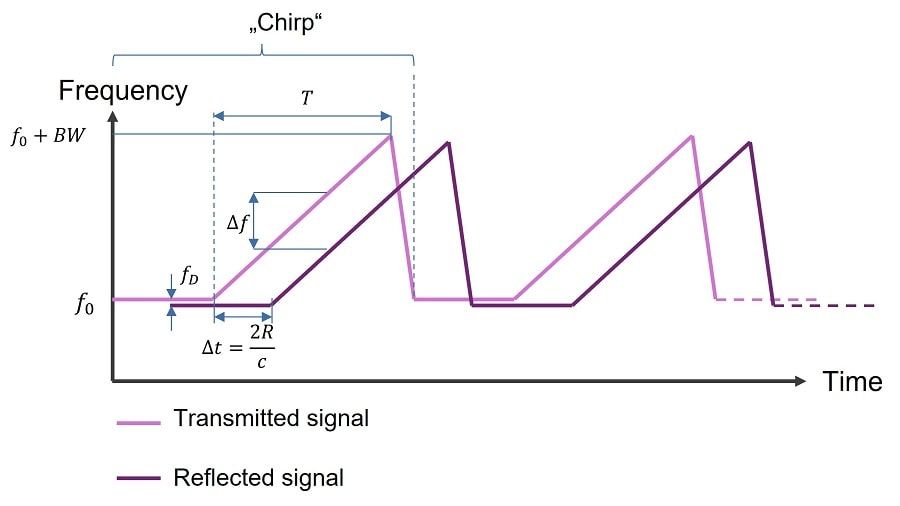
圖 2:鋸齒波 FMCW 雷達信號:頻率與時間。
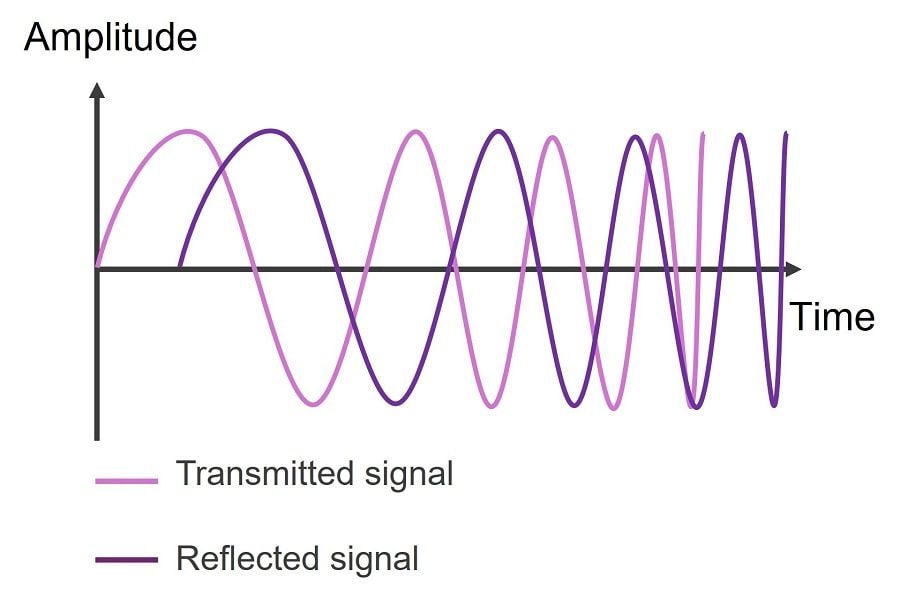
圖 3:FMCW 雷達信號:幅度與時間。
通過在任何給定時刻將反射波與原始信號進行比較,可以觀察到頻移 Δf。這種偏移允許確定信號或“啁啾”的每個周期的范圍 R。如果在幾個啁啾上監測信號,由于多普勒效應,將檢測到一個額外的頻移 fD 用于移動接近或遠離雷達的目標。這允許確定目標的速度。最后,如果考慮不同的信道,使用空間分布的天線,可以建立信號的到達方向,從而獲得目標的2D或3D位置。
這意味著,要進行 4D 檢測(距離、方位角和仰角方向以及速度),需要對信號進行時空處理。為此,需要將信號數字化并保存以供進一步處理。第一步將是創建所謂的“雷達立方體”。
1.3 雷達處理——雷達立方體
雷達數據立方體是對存儲的雷達數據進行時空處理的三維圖形描述。它總結了獲取距離、速度和方位信息所需的三個基本步驟。
如上所述,接收到的信號被采樣處理。第一步是執行 FFT(快速傅里葉變換),使每個樣本對應一個“bin”,以獲得所謂的“快速時間”上的范圍信息。這在圖 4 中進行了說明。對形成幀的每個啁啾重復該過程。
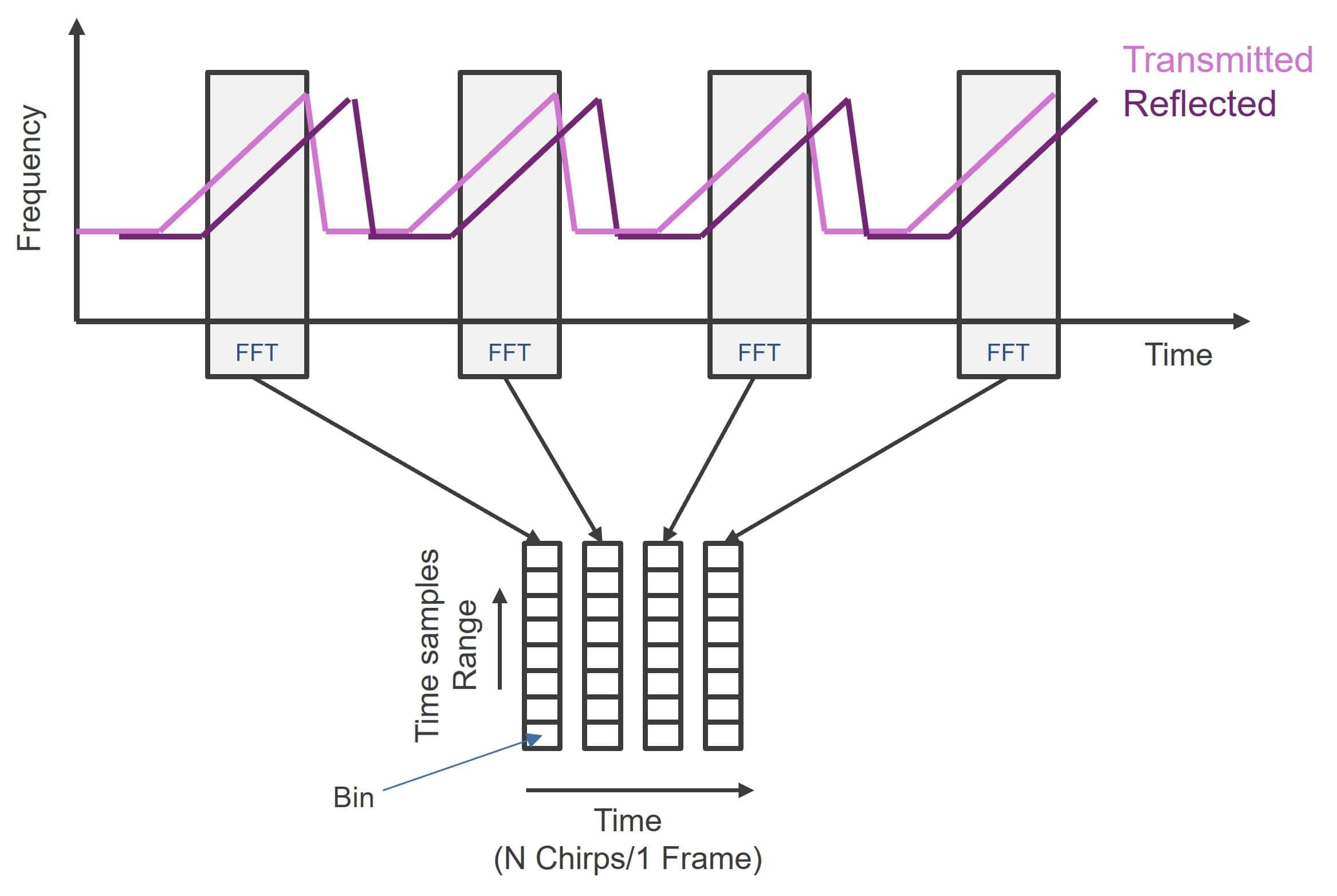
圖 4:雷達處理:距離 FFT。
一旦幀中的所有芯片都被采集、保存和處理,就會執行多普勒-FFT 以獲得有關目標速度的信息。該評估每幀進行一次,即每N個啁啾。因此,它也被稱為“慢時間”。最后,結合所有可用通道的空間數據,得到雷達立方體的第三維,其中包含目標空間位置的信息。雷達立方體的圖形表示如圖 5 所示。
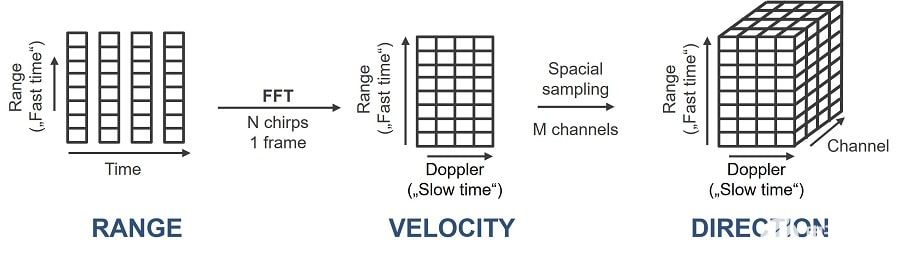
圖 5:雷達立方體。
1.4 汽車雷達模塊
半導體技術的進步促進了汽車雷達的部署,尤其是基于硅的技術。雖然在 2010 年代初期,多通道雷達收發器集成在單個 GaAs(砷化鎵)MMIC(單片微波集成電路)上,但如今硅鍺 (SiGe) 的使用提高了集成密度并降低了大規模生產的成本。下一個挑戰將是向 CMOS(互補金屬氧化物半導體)的過渡,這將允許在芯片上集成更多數字電路,同時保持良好的射頻性能。
然而,要實現雷達系統,每個雷達模塊必須包括一個或多個 MMIC 收發器,這些收發器發射雷達信號,檢測障礙物的回波,并執行一些信號調理和數字化,以準備原始雷達數據,以供處理程序進一步分析單元。后者可以是用于基本處理的微控制器單元 (MCU),但隨著雷達技術的進步,SoC(片上系統)越來越多地用于實現更復雜的目標分析、檢測和跟蹤。
圖 6 說明了在整個接收路徑上處理雷達信號的不同步驟。雖然模擬射頻處理和數字信號轉換總是在 MMIC 上執行,但信號分析的接口不是固定的。隨著雷達架構和信號處理越來越復雜,一些步驟(例如第一個 FFT)已經可以在 MMIC 上執行。此外,還可以將雷達收發器和處理單元組合在一個單片芯片中,用于角雷達等某些應用。
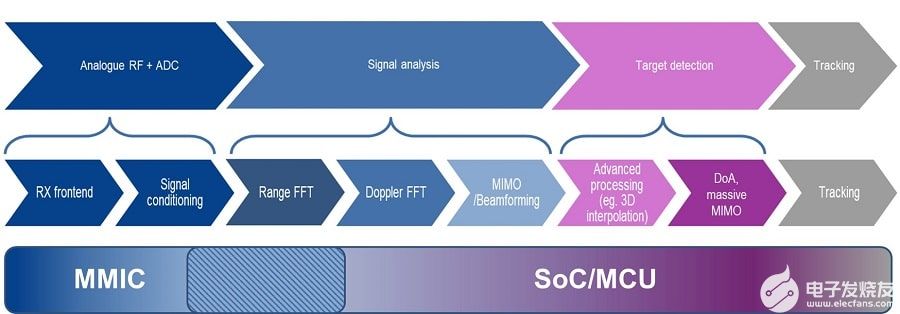
圖 6:雷達處理步驟。
未來,可以實現更復雜的架構,在汽車周圍分布多個衛星雷達。然后,雷達模塊將在將數據(例如距離和點云)傳送到中央控制單元(ECU)之前僅執行有限數量的預處理,然后中央控制單元(ECU)可以應用更先進的處理和數據融合,而不僅僅是衛星雷達模塊以及其他傳感器。
1.5 結論
本條目概述了用于汽車應用的 FMCW 雷達的工作原理,及其使用 MMIC 和 MCU/SoC 的實現。
審核編輯:郭婷
-
汽車電子
+關注
關注
3045文章
8962瀏覽量
172863 -
雷達
+關注
關注
52文章
3332瀏覽量
123942 -
FMCW
+關注
關注
9文章
110瀏覽量
24355
發布評論請先 登錄
調頻連續波(FMCW)為什么是自動駕駛激光雷達的未來?

FMCW和ToF激光雷達,哪種更適合自動駕駛?
AWR1642:77/79GHz FMCW雷達傳感器的卓越之選
【科研動態】新一代集成光子FMCW激光雷達光源的設計框架與性能權衡

自動駕駛激光雷達會傷害人體嗎?

純視覺自動駕駛的優勢和劣勢有哪些?

自動駕駛 ADAS 傳感器車規電容:低 ESR + 抗電磁干擾選型指南

自動駕駛中超聲波雷達、激光雷達、毫米波雷達有何區別?

如何確保自動駕駛汽車感知的準確性?

自動駕駛汽車是如何準確定位的?

激光雷達在自動駕駛領域中的優勢

激光雷達在自動駕駛中為何不可替代?


激光雷達技術:自動駕駛的應用與發展趨勢




 工商網監
工商網監
評論