 全雙工模式和半雙工模式的區別
全雙工模式和半雙工模式的區別

在雙工模式下,HiPER 的所有物理端口都支持全雙工和半雙工模式。
雙工器的方式
在串行通信中,數據通常在兩個站點(如終端和計算機)之間傳輸。 根據數據流向,可分為三種基本傳輸方式:全雙工、半雙工和單工。 但是,單純形目前很少使用,下面只介紹前兩種方法。
全雙工模式
兩個獨立的通道用于接收和發送,可以同時進行,互不干擾。 當端口設置為全雙工模式時,端口可以在發送數據包的同時接收數據包。
半雙工模式
半雙工:接收和發送共用同一個信道,只能同時進行發送或接收。 因此,半雙工可能會發生沖突。 當端口設置為半雙工模式時,該端口只能同時發送數據包或接收數據包。
全雙工模式和半雙工模式的區別。
當數據的發送和接收被兩條不同的傳輸線分開時,通信雙方可以同時發送和接收。這種傳輸方式是全雙工的。 在全雙工模式下,通信系統的每一端都配備一個發送器和一個接收器,因此可以控制數據同時雙向傳輸。全雙工模式不需要切換方向,所以沒有切換操作帶來的時間延遲,這對于那些不能有時間延遲的交互應用(如遠程監控系統)非常有利。這種方式需要通信雙方都有一個發送器和一個接收器,同時需要兩條數據線來傳輸數據信號,(可能需要控制線和狀態線,以及地線)。
例如,上位機使用串行接口連接顯示終端,顯示終端帶有鍵盤。這樣,一方面將鍵盤輸入的字符發送到主機的內存中;另一方面,可以將主機內存中的信息發送到屏幕上進行顯示。通常,在鍵盤上輸入一個字符后,它不會先顯示出來。上位機收到字符后,立即將其發送回終端,然后終端顯示該字符。這樣,前一個字符的返回過程和下一個字符的輸入過程同時進行,即工作在全雙工模式。
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
雙工器
+關注
關注
5文章
144瀏覽量
24903 -
端口
+關注
關注
4文章
1104瀏覽量
33962 -
串行通信
+關注
關注
4文章
608瀏覽量
37133
發布評論請先 登錄
相關推薦
熱點推薦
為什么叫“全雙工”和“半雙工”?
今天聊個通信里的基礎概念——全雙工和半雙工!簡單吧,簡單到"UART、RS-232 和 RS-485 是全雙工還是半雙工?"我差點都答不上來,嚇得我趕緊查資料補習! 先從詞源說起,“D
全雙工與半雙工光模塊:核心差異及應用解析
載體,二者的本質區別主要聚焦于數據傳輸的同步能力:其中,半雙工光模塊僅能實現單向的數據傳輸,而全雙工光模塊則可達成雙向同步傳輸,且擁有更出色的傳輸效率。 從光模塊的適配對應關系來看,半雙工
全雙工光模塊與半雙工光模塊的區別?
在光通信系統的構建與運維過程中,光模塊作為核心傳輸組件,其傳輸模式的選擇直接影響系統的數據交互效率與整體性能。全雙工光模塊與半雙工光模塊作為兩類關鍵的傳輸模式,二者的核心差異集中體現在
CW32 UART單線半雙工模式
完成后,接收完成標志位 UARTx_ISR.RC 會被硬件置 位,此時應盡快讀取 UARTx_RDR 寄存器,并清除 UARTx_ISR.RC 標志位。
UART工作在單線半雙工模式時,UARTx_TXD
發表于 01-05 06:24
ISOx5隔離式3.3 - V半雙工和全雙工RS - 485收發器技術全解析
ISOx5隔離式3.3 - V半雙工和全雙工RS - 485收發器技術全解析 在工業自動化、網絡通信等眾多領域,可靠的數據傳輸是系統穩定運行的關鍵,RS - 485接口憑借其出色的電氣特性,成為
高速全雙工RS485收發器SiLM1452LGC-DG
、電力監控等場景中對高帶寬和高效雙向數據交互的嚴苛要求。核心特性:
高速全雙工通信:數據傳輸速率最高支持50Mbps,并以全雙工模式工作,支持數據同時收發,有效提升通信效率,減少傳輸延遲。
強健的信號
發表于 12-25 09:28
SPI 支持單線半雙工通信模式
SPI 支持單線半雙工通信模式,在該模式下,主機和從機通過一條雙向數據線進行數據通信,主機使用 MOSI,從機使用 MISO,未使用的其他 SPI 信號線可供其它功能使用。設置控制寄存器 SPIx_CR1 的 MODE 位域為
發表于 12-12 07:52
全雙工對講系統對比半雙工優勢在哪?
全雙工對講系統讓溝通無延遲、免按鍵,顯著提升團隊效率。深入解析DSP引擎、AEC回聲消除、1.9GHz DECT頻段與網狀網絡等核心技術,展示其在電影拍攝、工業安全、活動管理及無人機操作中的應用。選擇高性能無線全雙工對講系統,體驗清晰音質與實時雙向通信。

全雙工通信:技術原理、模式與系統分析
全雙工通信是現代通信的核心技術,支持信號在同一時間實現雙向傳輸。本文深入解析全雙工、半雙工與單工的區別,介紹其工作原理(FDD頻分雙工、TD

SPI使用單工模式通訊
SPI使用單工模式通訊
本帖子演示AT32F403Axx SPI使用單工模式通訊,其余系列使用方式與此類似。注:本示例代碼是基于雅特力提供的V2.x.x板級支持包(BSP)而開發,對于其他版本
發表于 10-20 16:24
雙工跳線和雙芯跳線的區別是什么
雙工跳線和雙芯跳線在定義、傳輸模式、結構設計和應用場景上存在明顯區別: 定義與核心功能: 雙工跳線:基于通信模式分類,強調數據傳輸的雙向性。
求助,關于半雙工模式下的Uart問題求解
,該引腳被配置為具有內部推挽的輸入。為了傳輸,它被配置為推/拉。
我沒有在 usic 應用說明或參考手冊中看到任何關于需要此功能的信息。然而,這種重新編程會導致傳輸線出現故障。
我的問題是:
對于半雙工模式,運行時是否必須對 tx/rx 引腳進行重新編程?
當需要時如何防止這些故障?
發表于 07-30 07:00
雙工不匹配如何修復它
,確保所有相關設備的雙工模式一致,例如都設置為全雙工或半雙工。 啟用自動協商功能:推薦在所有端口啟用自協商功能,以便設備能夠自動匹配最佳的雙工模式和速度。現代設備通常支持智能匹配,可以
MAX19713 10位、45Msps、全雙工模擬前端技術手冊
MAX19713是超低功耗、高集成度混合信號模擬前端(AFE),工作在全雙工(FD)模式,可理想用于寬帶通信系統。該器件經過優化,能夠以極低功耗獲得較高的動態性能,集成了雙路10位、45Msps接收
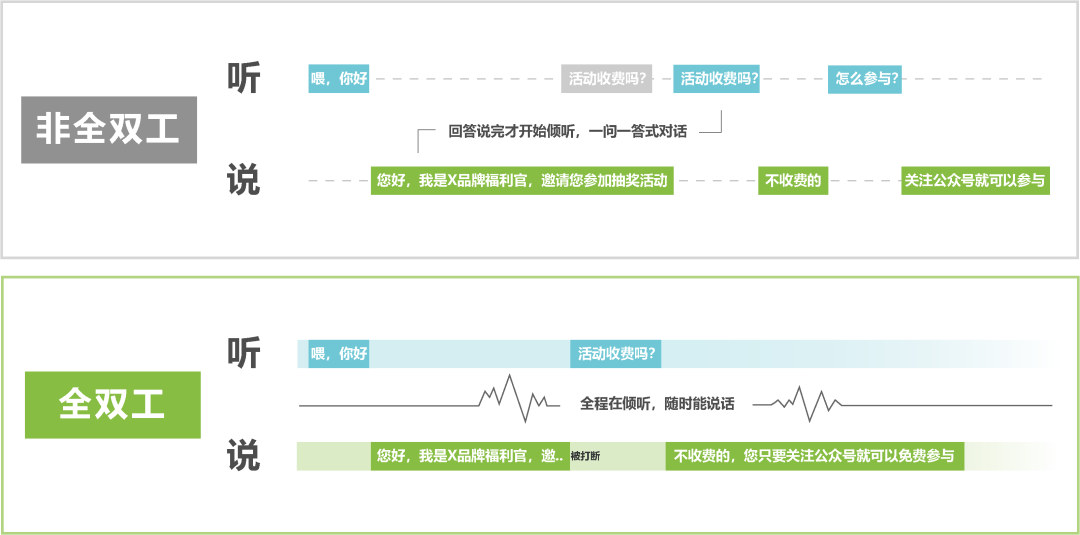
全雙工分軌語音數據集:讓AI實現無縫對話
全雙工語音交互是一種允許設備在接收語音的同時并行處理和響應的技術。在傳統半雙工模式下,用戶需要說完一句話后等待系統響應,交互效率低且體驗不自然;而全雙工交互支持邊聽邊說、實時打斷和無效語音拒識等。



 工商網監
工商網監
評論