") KUKA機(jī)器人利用WorkVisual拓?fù)浣Y(jié)構(gòu)診斷網(wǎng)絡(luò)故障
KUKA機(jī)器人利用WorkVisual拓?fù)浣Y(jié)構(gòu)診斷網(wǎng)絡(luò)故障

拓?fù)浣Y(jié)構(gòu)診斷
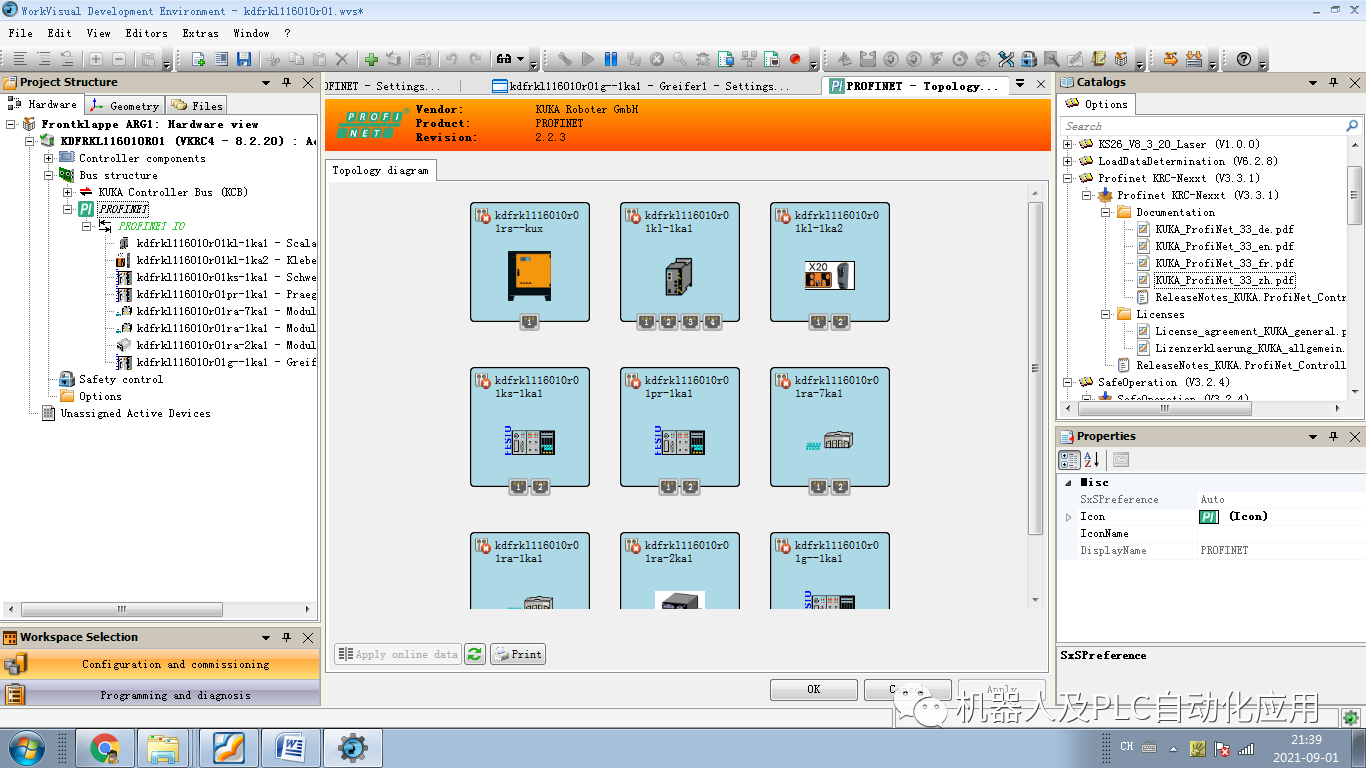
1. 在窗口項(xiàng)目結(jié)構(gòu)的選項(xiàng)卡設(shè)備中展開機(jī)器人控制系統(tǒng)的樹形結(jié)構(gòu)。
2. 選中 PROFINET 節(jié)點(diǎn)。
3. 點(diǎn)擊按鈕 。選項(xiàng)卡 拓?fù)浣Y(jié)構(gòu) 顯示。
。選項(xiàng)卡 拓?fù)浣Y(jié)構(gòu) 顯示。
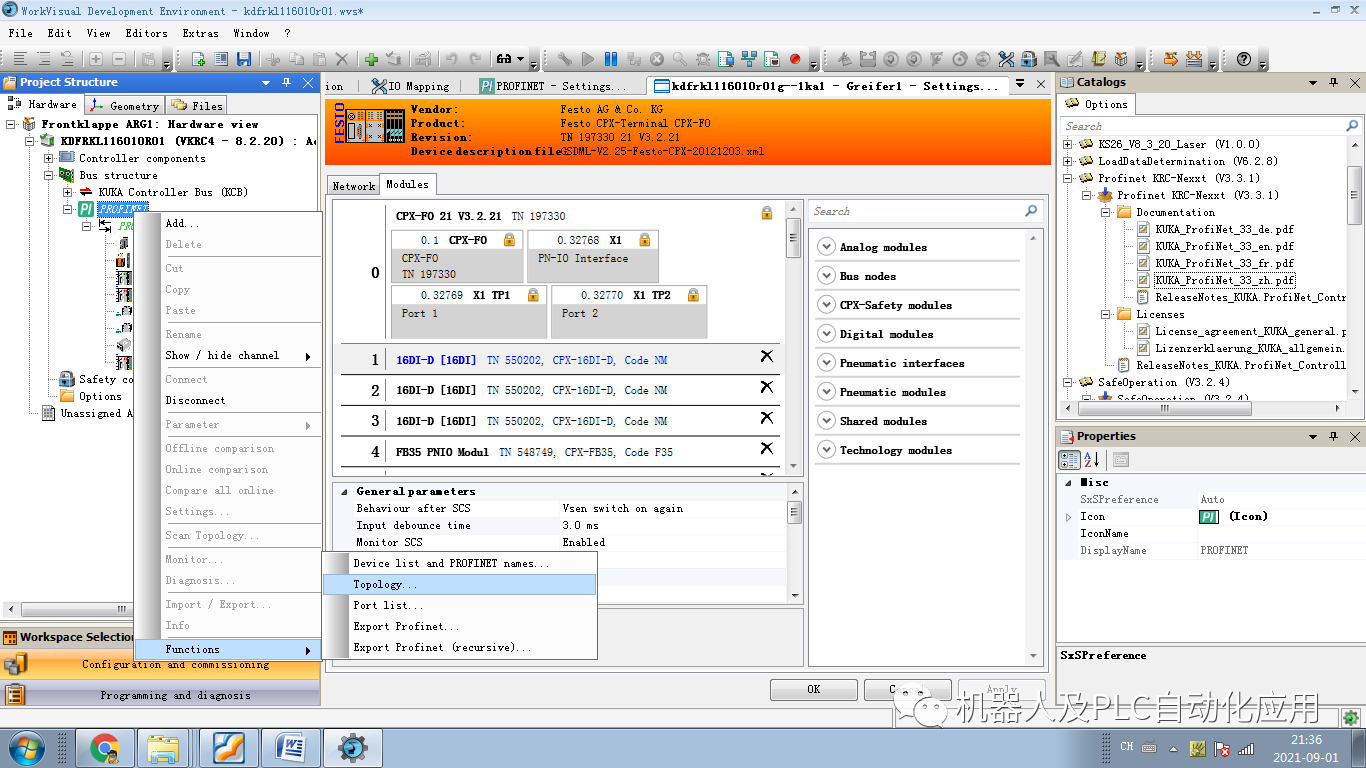
操作步驟
1. 在窗口項(xiàng)目結(jié)構(gòu)的選項(xiàng)卡設(shè)備中展開機(jī)器人控制系統(tǒng)的樹形結(jié)構(gòu)。
2. 在樹狀結(jié)構(gòu)中點(diǎn)擊 PROFINET并在彈出菜單中選擇連接。
3. 用右鍵點(diǎn)擊 PROFINET 并在快捷菜單中選擇 功能 > 拓?fù)?...。選項(xiàng)卡拓?fù)浼幢伙@示。
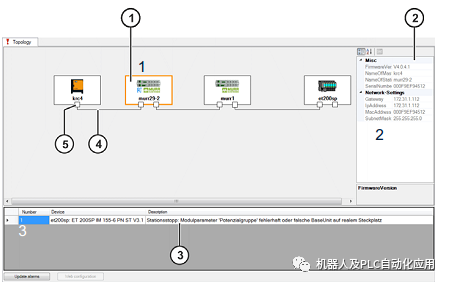
1. 工業(yè)以太網(wǎng)設(shè)備
如果設(shè)備顯示為白色,則存在一個(gè)與此設(shè)備的連接。如果設(shè)備顯示為灰色,則不存在與此設(shè)備的連接。
2. 參數(shù)窗口
為所選的設(shè)備顯示不同的參數(shù)。
3. 信息窗口
如果設(shè)備報(bào)錯(cuò),則顯示該信息提示窗口。點(diǎn)擊 更新警報(bào) 按鈕可更新顯示。
4.按鈕網(wǎng)絡(luò)配置可打開設(shè)備的網(wǎng)絡(luò)界面。在此可執(zhí)行設(shè)備診斷或更改設(shè)備配置。
5. 連接電纜.
6.接口-已連接的接口顯示為白色,未連接的顯示為灰色。
---我們通過拓?fù)涞脑\斷功能可以更直觀的發(fā)現(xiàn)問題,同時(shí)根據(jù)報(bào)警提示查找網(wǎng)絡(luò)故障的問題點(diǎn),縮短維修時(shí)間是比較快速有效的故障判斷及處理的工具。
----------------END------------------
審核編輯 :李倩
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6952瀏覽量
114088 -
拓?fù)?/span>
+關(guān)注
關(guān)注
4文章
352瀏覽量
30478 -
KUKA機(jī)器人
+關(guān)注
關(guān)注
4文章
144瀏覽量
10070
原文標(biāo)題:KUKA機(jī)器人利用WorkVisual拓?fù)浣Y(jié)構(gòu)診斷網(wǎng)絡(luò)故障
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機(jī)器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
探索RISC-V在機(jī)器人領(lǐng)域的潛力
人形機(jī)器人開發(fā)加速器:EC-Engineer Web + Jetson AGX Orin 的遠(yuǎn)程診斷新玩法




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論