 如何在STM32中要實現數據通訊
如何在STM32中要實現數據通訊

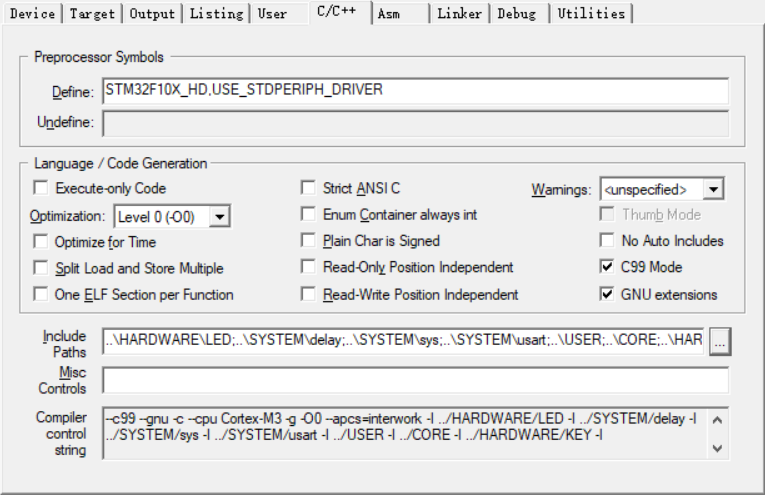
在stm32中要實現數據通訊,首先要設置相關的寄存器,這里不做相關的介紹,直接說代碼相關的能內容及相關函數對應的用法。
直接上代碼。
1.串口通訊代碼
usart.h
#ifndef __USART_H
#define __USART_H
#include "stdio.h"
#include "sys.h"
#define USART_REC_LEN 200 //定義最大接收字節數 200
#define EN_USART3_RX 1 //使能(1)/禁止(0)串口1接收
extern u8 USART_RX_BUF[USART_REC_LEN]; //接收緩沖,最大USART_REC_LEN個字節.末字節為換行符
extern u16 USART_RX_STA; //接收狀態標記
//如果想串口中斷接收,請不要注釋以下宏定義
void uart_init(u32 bound);
#endif
對應的usart.c代碼
#include "sys.h"
#include "usart.h"
//加入以下代碼,支持printf函數,而不需要選擇use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//標準庫需要的支持函數
struct __FILE
{
int handle;
};
FILE __stdout;
//定義_sys_exit()以避免使用半主機模式
void _sys_exit(int x)
{
x = x;
}
//重定義fputc函數
int fputc(int ch, FILE *f)
{
while((USART3->SR&0X40)==0);//循環發送,直到發送完畢
USART3->DR = (u8) ch;
return ch;
}
#endif
/*使用microLib的方法*/
/*
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void) {
while (!(USART1->SR & USART_FLAG_RXNE));
return ((int)(USART1->DR & 0x1FF));
}
*/
#if EN_USART3_RX //如果使能了接收
//串口1中斷服務程序
//注意,讀取USARTx->SR能避免莫名其妙的錯誤
u8 USART_RX_BUF[USART_REC_LEN]; //接收緩沖,最大USART_REC_LEN個字節.
//接收狀態
//bit15, 接收完成標志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字節數目
u16 USART_RX_STA=0; //接收狀態標記
void uart_init(u32 bound)
{
//GPIO端口設置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE);//使能USART1,GPIOA時鐘
//USART3_TX GPIOB.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PB.10
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //復用推挽輸出
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIOB.10
//USART3_RX GPIOB.11初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空輸入
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIOB.11
//Usart3 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//搶占優先級3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子優先級3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根據指定的參數初始化VIC寄存器
//USART 初始化設置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字長為8位數據格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一個停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//無奇偶校驗位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//無硬件數據流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收發模式
USART_Init(USART3, &USART_InitStructure); //初始化串口3
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);//開啟串口接受中斷
USART_Cmd(USART3, ENABLE); //使能串口3
}
void USART3_IRQHandler(void) //串口3中斷服務程序
{
u8 Res;
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS為真,則需要支持OS.
OSIntEnter();
#endif
if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET) //接收中斷(接收到的數據必須是0x0d 0x0a結尾)
{
Res = USART_ReceiveData(USART3); //讀取接收到的數據
printf("get data %c \r\n",Res);
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收錯誤,重新開始
else USART_RX_STA|=0x8000; //接收完成了
}
else //還沒收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收數據錯誤,重新開始接收
}
}
}
}
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS為真,則需要支持OS.
OSIntExit();
#endif
}
#endif
通過上述的函數,只需要在main函數設置相關的打印函數即可打印相關的內容,這里不做相關的陳述,后面主函數會進行相關的設置。
2.進行相關的adc函數配置
adc.h函數代碼如下:
#ifndef __ADC_H
#define __ADC_H
#include "sys.h"
void Adc_Init(void);
u16 Get_Adc(u8 ch);
u16 Get_Adc_Average(u8 ch,u8 times);
#endif
對應的adc.c函數代碼:
#include "adc.h"
#include "delay.h"
//////////////////////////////////////////////////////////////////////////////////
//adc配置函數
//////////////////////////////////////////////////////////////////////////////////
//初始化ADC
//我們默認將開啟通道0~3
void Adc_Init(void)
{
ADC_InitTypeDef ADC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA |RCC_APB2Periph_ADC1 , ENABLE ); //使能ADC1通道時鐘
RCC_ADCCLKConfig(RCC_PCLK2_Div6); //設置ADC分頻因子6 72M/6=12,ADC最大時間不能超過14M
//PC0 作為模擬通道輸入引腳
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //模擬輸入引腳
GPIO_Init(GPIOC, &GPIO_InitStructure);
ADC_DeInit(ADC1); //復位ADC1
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //ADC工作模式:ADC1和ADC2工作在獨立模式
ADC_InitStructure.ADC_ScanConvMode = DISABLE; //模數轉換工作在單通道模式
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //模數轉換工作在單次轉換模式
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //轉換由軟件而不是外部觸發啟動
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //ADC數據右對齊
ADC_InitStructure.ADC_NbrOfChannel = 1; //順序進行規則轉換的ADC通道的數目
ADC_Init(ADC1, &ADC_InitStructure); //根據ADC_InitStruct中指定的參數初始化外設ADCx的寄存器
ADC_Cmd(ADC1, ENABLE); //使能指定的ADC1
ADC_ResetCalibration(ADC1); //使能復位校準
while(ADC_GetResetCalibrationStatus(ADC1)); //等待復位校準結束
ADC_StartCalibration(ADC1); //開啟AD校準
while(ADC_GetCalibrationStatus(ADC1)); //等待校準結束
// ADC_SoftwareStartConvCmd(ADC1, ENABLE); //使能指定的ADC1的軟件轉換啟動功能
}
//獲得ADC值
//ch:通道值 0~3
u16 Get_Adc(u8 ch)
{
//設置指定ADC的規則組通道,一個序列,采樣時間
ADC_RegularChannelConfig(ADC1, ch, 1, ADC_SampleTime_239Cycles5 ); //ADC1,ADC通道,采樣時間為239.5周期
ADC_SoftwareStartConvCmd(ADC1, ENABLE); //使能指定的ADC1的軟件轉換啟動功能
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC ));//等待轉換結束
return ADC_GetConversionValue(ADC1); //返回最近一次ADC1規則組的轉換結果
}
u16 Get_Adc_Average(u8 ch,u8 times)
{
u32 temp_val=0;
u8 t;
for(t=0;t;t++)>
3.主函數內容
#include "delay.h"
#include "common.h"
#include "usart.h"
#include "can.h"
#include "string.h"
#define adcx adc;
int main(void)
{
int real_100_vol;
u8 Res,res,data;
u16 adcx;
u8 i=0,t=0;
u8 cnt=11;
delay_init(); //延時函數初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//設置中斷優先級分組為組2:2位搶占優先級,2位響應優先級
uart_init(115200); //串口初始化為115200
Adc_Init(); //adc初始化
CAN_Mode_Init(CAN_SJW_1tq,CAN_BS2_8tq,CAN_BS1_9tq,8,CAN_Mode_LoopBack);//CAN初始化環回模式,波特率500Kbps ,設置8為500k,設置4為250k
printf("APP start OK!\r\n");
while(1)
{
char canbuf_8;
int a = 165;
adc=Get_Adc_Average(ADC_Channel_10,50);
vol_led=(float)adc*(3.3/4096);
// adcx=vol_led;
// vol_led-=adcx;
// vol_led*=1000;
printf("AD值:%d\r\n 電壓值:%f V",adc,vol_led); //打印ad值和電壓值
H文件與C文件進行配置。
即可通過串口讀取到相關的數據AD值和電壓值。
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
寄存器
+關注
關注
31文章
5607瀏覽量
129766 -
數據
+關注
關注
8文章
7332瀏覽量
94573 -
串口
+關注
關注
15文章
1617瀏覽量
82592
發布評論請先 登錄
相關推薦
熱點推薦
不用編程不用組態,實現CODESYS控制器與西門子、三菱等不同品牌的PLC之間數據通訊
PLC通訊智能網關作為工業通訊樞紐,支持包括CODESYS、西門子、三菱、羅克韋爾AB 等幾乎所有PLC控制器的原生協議,不用編程不用組態,僅需在網關配置軟件中定義數據標簽映射關系,即

不用編程不用聯網,快速實現PLC與數據庫雙向數據通訊的案例
?IGT-SER系列智能網關方便實現多臺PLC與SQL數據庫之間的數據通訊,既可以讀取PLC的數據上報到數據庫,也可以從
發表于 01-14 10:51
ProfiNet轉Ethernet/IP 配置案例:實現三菱FR-E800變頻器與S7-1500通訊
Profinet轉EtherNet/IP 專業通訊網關應運而生,成為實現二者高效數據通訊的核心樞紐。 在某大型自動化生產車間,為優化電機驅動控制流程,提升生產效率,需要實現 Prof

E+H 91W電磁流量計hart轉485通訊應用
1.E+H 91W電磁流量計2.E+H hart轉485裸板
91W電磁流量計內嵌式hart轉485裸板安裝
91W電磁流量計內嵌式hart轉485數據通訊
發表于 11-12 15:20
如何在下載程序時保護flash中的用戶數據不被覆蓋?
使用stm32cubeide或stm32cubeprogrammer燒寫程序,stlink下載器,芯片stm32h743,芯片內部flash的0x08100000地址中寫有用戶
發表于 08-14 06:38
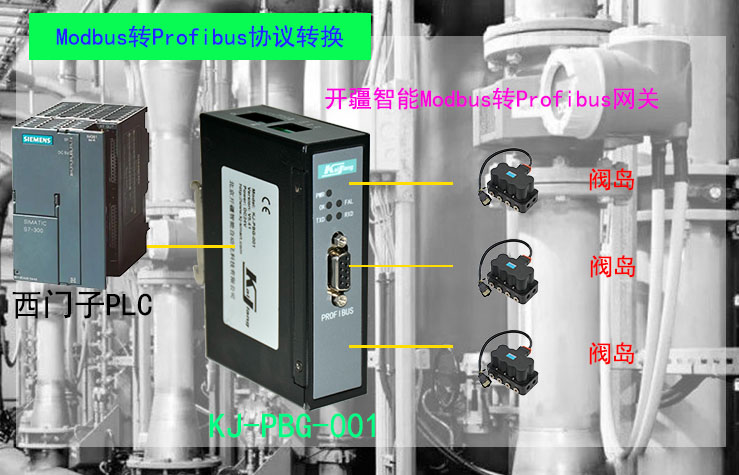
閥島如何通過Modbus轉Profibus網關實現高效通訊!
在現代工業自動化領域,不同設備和系統間的數據通訊是確保生產效率與安全的關鍵因素之一。為了實現不同通信協議的設備無縫對接,提高整個自動化系統的兼容性和靈活性,開疆智能Modbus轉Profibus網關

Profibus轉Modbus網關:大屏數據通訊的協議轉換方案
廣泛使用的通訊協議,各自在不同工業自動化系統中發揮著重要作用。當面對特定應用需求如LED大屏顯示時,實現這兩種協議之間的無縫連接和數據通訊顯得尤為重要。無錫耐特森Profibus轉Modbus網關
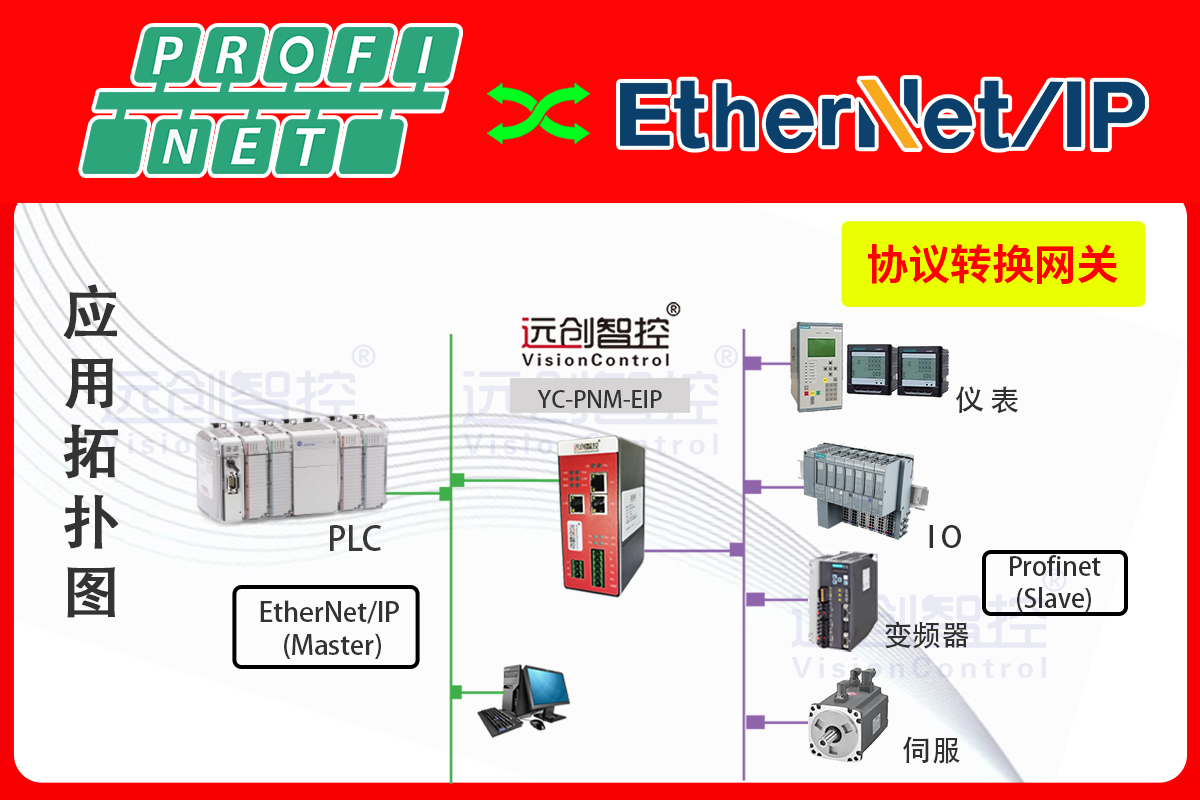
ProfiNet轉Ethernet/IP協議網關實現三菱FR-E800系列變頻器與西門子S7-1500系列PLC通訊的配置案例
智控YC-PNM-EIPProfinet轉EtherNet/IP專業通訊網關應運而生,成為實現二者高效數據通訊的核心樞紐。 在某大型自動化生產車間,為優化電機驅動控制流程,提升生產效率,需要實
通過標準化數據通路來實現數據共享
標準化的數據接入與讀取接口。
標準化數據通路的定義和實現
標準化數據通路是為各種業務場景提供的跨應用的數據接入與讀取通路,它可以暫存應用需
發表于 06-17 06:57
RS232轉Profinet網關實現掃碼槍高速入網的關鍵方案
在當今的工業自動化和信息化時代,數據通訊技術發揮著至關重要的作用。RS232和Profinet協議,兩者都是工業領域中廣泛使用的數據通訊標準。RS232是一種歷史悠久的串行通信協議,而
STM32與機智云連接實現步驟與技巧(下篇):機智云代碼移植與優化
在《STM32與機智云連接實現步驟與技巧(上篇)》中,我們介紹了硬件連接和通信協議配置。本篇將重點講解如何將機智云相關代碼移植到STM32,完成數據

不用聯網不用編程,PLC通過智能網關快速實現HTTP協議JSON格式與MES等系統平臺雙向數據通訊
進行解析后將數據寫入到PLC,實現PLC與HTTP服務端雙向通訊;作為服務端時根據客戶端URL中的路徑查找所配置的數據,打包成JSON文件后

如何實現不同品牌多網段PLC數據通訊
,網段為192.168.2.x。隨著工廠智能化管理的推進,需要將所有PLC的數據進行集中采集與分析,以實現生產過程的優化控制和高效管理。但由于不同品牌PLC的協議差異,以及網段的不同,導致數據通訊難以直接

STM32H747I DSI模塊采用一個數據通道無法顯示圖片怎么解決?
的是STM32H747I-DISCO,顯示屏采用的是MB1166-A09。
大佬們能不能提供一些思路,應該怎么實現一個數據通道通信?感激!
發表于 03-07 08:11



 工商網監
工商網監
評論