 電機控制進階2——PID位置控制
電機控制進階2——PID位置控制

上篇文章講解了電機的速度環控制,可以控制電機快速準確地到達指定速度。
本篇來介紹電機的位置環控制,實現電機快速準確地轉動到指定位置。
1 位置控制與速度控制的區別
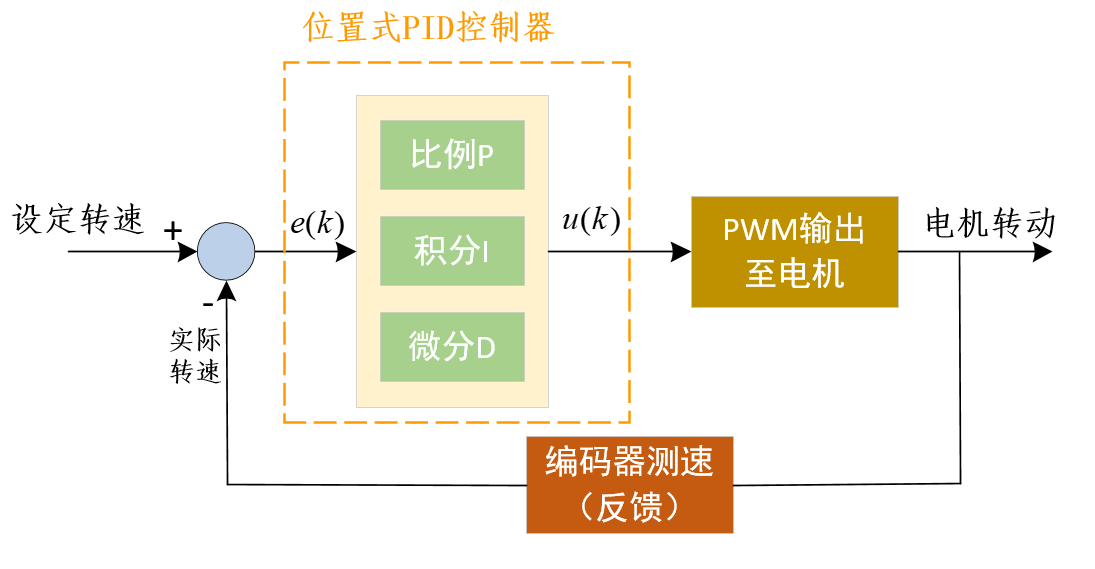
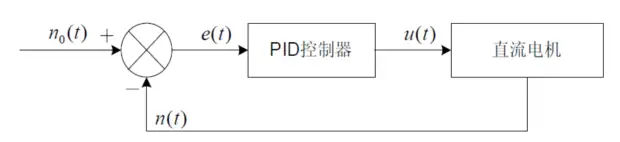
回顧上篇,電機速度PID控制的結構圖如下,目標值是設定的速度,通過編碼器獲取電機的轉速作為反饋,實現電機轉速的控制。
再來看電機位置PID控制,其結構圖如下,目標值是設定的位置,通過編碼器獲取電機累計轉動的脈沖數作為反饋,實現電機位置的控制。
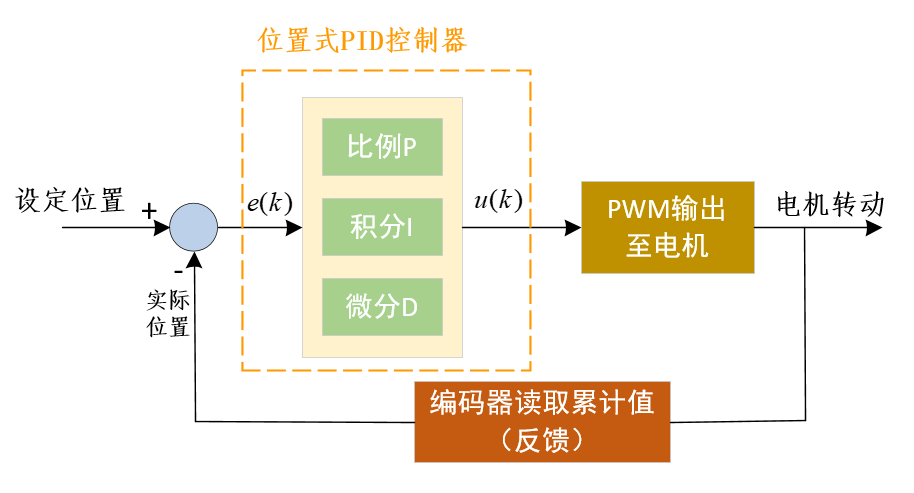
所以:對比兩張圖,速度控制與位置控制的主要區別,就是控制量的不同。
2 核心程序
了解了速度控制與位置控制的區別后,下面就可以修改程序。
2.1 編碼器相關
2.1.1 電機與編碼器參數
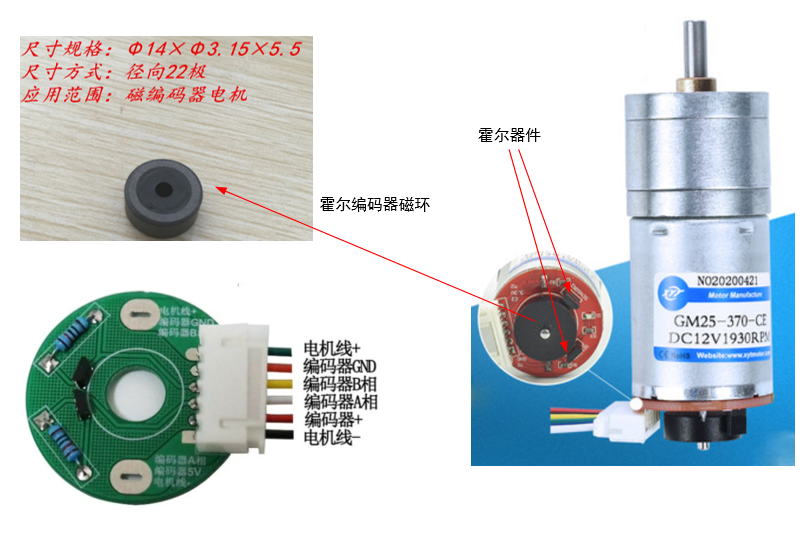
編碼器部分,需要根據自己電機的實際參數進行設定,比如我用到的電機:
編碼器一圈的物理脈沖數為11
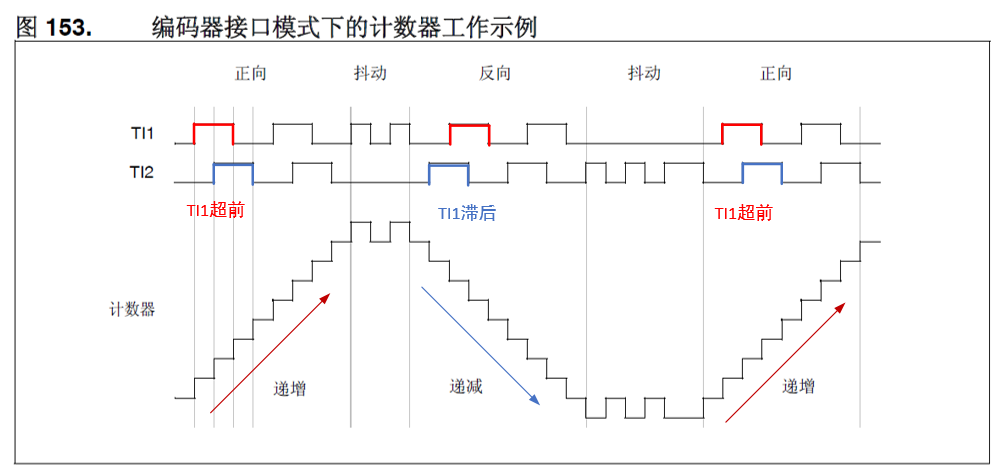
定時器編碼器模式通過設置倍頻來實現4倍頻
電機的減速齒輪的減速比為1:34
所以,電機轉一圈總的脈沖數,即定時器能讀到的脈沖數為11*4*34= 1496。
#define ENCODER_RESOLUTION 11
/*編碼器一圈的物理脈沖數*/
#define ENCODER_MULTIPLE 4
/*編碼器倍頻,通過定時器的編碼器模式設置*/
#define MOTOR_REDUCTION_RATIO 34
/*電機的減速比*/
?
/*電機轉一圈總的脈沖數(定時器能讀到的脈沖數) = 編碼器物理脈沖數*編碼器倍頻*電機減速比 */
/* 11*4*34= 1496*/
#define TOTAL_RESOLUTION ( ENCODER_RESOLUTION*ENCODER_MULTIPLE*MOTOR_REDUCTION_RATIO )
想要了解更多關于編碼器的使用,可參照之前的文章: ( http://www.3532n.com/d/1639052.html )
2.1.2 定時器編碼器模式配置
用于編碼器捕獲的定時器的一些宏定義。
#define ENCODER_TIM_PSC 0
/*計數器分頻*/
#define ENCODER_TIM_PERIOD 65535
/*計數器最大值*/
#define CNT_INIT 0
/*計數器初值*/
配置主要關注重裝載值,倍頻,溢出中斷設置。
/* TIM4通道1通道2 正交編碼器 */
void TIMx_encoder_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct; /*GPIO*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseStruct; /*時基*/
TIM_ICInitTypeDef TIM_ICInitStruct; /*輸入通道*/
NVIC_InitTypeDef NVIC_InitStructure; /*中斷*/
/*GPIO初始化*/
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE); /*使能GPIO時鐘 AHB1*/
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF; /*復用功能*/
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_100MHz; /*速度100MHz*/
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_PinAFConfig(GPIOB,GPIO_PinSource6,GPIO_AF_TIM4);
GPIO_PinAFConfig(GPIOB,GPIO_PinSource7,GPIO_AF_TIM4);
/*時基初始化*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); /*使能定時器時鐘 APB1*/
TIM_DeInit(TIM4);
TIM_TimeBaseStructInit(&TIM_TimeBaseStruct);
TIM_TimeBaseStruct.TIM_Prescaler = ENCODER_TIM_PSC; /*預分頻 */
TIM_TimeBaseStruct.TIM_Period = ENCODER_TIM_PERIOD; /*周期(重裝載值)*/
TIM_TimeBaseStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStruct.TIM_CounterMode = TIM_CounterMode_Up; /*連續向上計數模式*/
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStruct);
/*編碼器模式配置:同時捕獲通道1與通道2(即4倍頻),極性均為Rising*/
TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12,TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
TIM_ICStructInit(&TIM_ICInitStruct);
TIM_ICInitStruct.TIM_ICFilter = 0; /*輸入通道的濾波參數*/
TIM_ICInit(TIM4, &TIM_ICInitStruct); /*輸入通道初始化*/
TIM_SetCounter(TIM4, CNT_INIT); /*CNT設初值*/
TIM_ClearFlag(TIM4,TIM_IT_Update); /*中斷標志清0*/
TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE); /*中斷使能*/
TIM_Cmd(TIM4,ENABLE); /*使能CR寄存器*/
/*中斷配置*/
NVIC_InitStructure.NVIC_IRQChannel=TIM4_IRQn; //定時器4中斷
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0x01; //搶占優先級1
NVIC_InitStructure.NVIC_IRQChannelSubPriority=0x01; //子優先級1
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
想要了解更多關于定時器編碼器模式配置的詳細介紹,可參照之前的文章:
2.1.3 讀取編碼器的值
讀取值,這里直接讀取原始值即可,讀取后也不需要再設置計數初值,因為使用的溢出中斷。
uint32_t read_encoder(void)
{
uint32_t encoderNum = 0;
encoderNum = (TIM4->CNT);
return encoderNum;
}
2.1.4 編碼器計數值溢出處理
溢出中斷中,主要判斷是向上溢出還是向下溢出,因為電機可以正反轉,所以需要記錄溢出的方向。
/* 定時器溢出次數 */
__IO int16_t EncoderOverflowCnt = 0;
//定時器4中斷服務函數
void TIM4_IRQHandler(void)
{
if(TIM_GetITStatus(TIM4,TIM_IT_Update)==SET) //溢出中斷
{
if((TIM4->CR1 & TIM_CounterMode_Down) != TIM_CounterMode_Down)
{
EncoderOverflowCnt++;/*編碼器計數值[向上]溢出*/
}
else
{
EncoderOverflowCnt--;/*編碼器計數值[向下]溢出*/
}
}
TIM_ClearITPendingBit(TIM4,TIM_IT_Update); //清除中斷標志位
}
2.2 PID計算相關
2.2.1 周期定時
定時器配置,通過設置自動重裝載值和定時器分頻實現指定周期的定時。
void TIMx_calcPID_init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM7,ENABLE); ///使能TIM7時鐘
TIM_TimeBaseInitStructure.TIM_Period = arr; //自動重裝載值
TIM_TimeBaseInitStructure.TIM_Prescaler=psc; //定時器分頻
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上計數模式
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM7,&TIM_TimeBaseInitStructure);//初始化TIM7
TIM_ITConfig(TIM7,TIM_IT_Update,ENABLE); //允許定時器6更新中斷
TIM_Cmd(TIM7,DISABLE); //初始化時先不開啟定時器7
NVIC_InitStructure.NVIC_IRQChannel=TIM7_IRQn; //定時器6中斷
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0x01; //搶占優先級1
NVIC_InitStructure.NVIC_IRQChannelSubPriority=0x03; //子優先級3
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
TIMx_calcPID_init(100-1,8400-1);/*定時10ms,這句在主函數中調用*/
定時器中斷中,每10ms進行1次PID計算
void TIM7_IRQHandler(void)
{
if(TIM_GetITStatus(TIM7,TIM_IT_Update)==SET) //溢出中斷
{
AutoReloadCallback();
}
TIM_ClearITPendingBit(TIM7,TIM_IT_Update); //清除中斷標志位
}
想要了解更多關于基礎定時器的配置與使用,可參照之前的文章:( http://www.3532n.com/d/1640145.html )

2.2.2 PID電機控制邏輯
周期定時器的回調函數中進行PID的計算,程序中被注釋掉的兩句是速度控制的代碼,用于與位置控制進行對比,通過對比可以明顯的看出,位置控制與速度控制的區別在于傳入PID的控制量。
void AutoReloadCallback()
{
static __IO int encoderNow = 0; /*當前時刻總計數值*/
static __IO int encoderLast = 0; /*上一時刻總計數值*/
int encoderDelta = 0; /*當前時刻與上一時刻編碼器的變化量*/
int res_pwm = 0; /*PID計算得到的PWM值*/
/*【1】讀取編碼器的值*/
encoderNow = read_encoder() + EncoderOverflowCnt*ENCODER_TIM_PERIOD;/*獲取當前的累計值*/
encoderDelta = encoderNow - encoderLast; /*得到變化值*/
encoderLast = encoderNow;/*更新上次的累計值*/
/*【2】PID運算,得到PWM控制值*/
//res_pwm = pwm_val_protect((int)PID_realize(encoderDelta));/*傳入編碼器的[變化值],實現電機【速度】控制*/
res_pwm = pwm_val_protect((int)PID_realize(encoderNow));/*傳入編碼器的[總計數值],實現電機【位置】控制*/
/*【3】PWM控制電機*/
set_motor_rotate(res_pwm);
/*【4】數據上傳到上位機顯示*/
//set_computer_value(SEND_FACT_CMD, CURVES_CH1, &encoderDelta, 1); /*給通道1發送實際的電機【速度】值*/
set_computer_value(SEND_FACT_CMD, CURVES_CH1, &encoderNow, 1); /*給通道1發送實際的電機【位置】值*/
}
3 實驗演示
實驗中,指定目標值1496,可以實現電機正轉1圈,再指定目標值-1496,因為是相對位置,電機會反轉2圈。當指定14960轉10圈時進行觀察,若PID的參數不合適,會出現靜態誤差、或是持續抖動、或是誤差消除慢等情況。通過不斷的調整參數,可以實際感受到PID各項的調節作用。
-
電機
+關注
關注
143文章
9592瀏覽量
154106 -
控制
+關注
關注
5文章
1035瀏覽量
125300 -
PID
+關注
關注
38文章
1499瀏覽量
91197
發布評論請先 登錄

PID控制的算法
怎樣理解變頻器內置PID控制參數的含義
使用位置傳感器進行無刷電機控制

永磁同步直線電機的粒子群PID空間矢量控制
PID串級控制在同步發電機勵磁控制中的應用
掃描電機的PID恒速控制仿真及實驗
改進的BP網絡PID控制器在無刷直流電機中的應用
【電機控制】PMSM無感FOC控制



 工商網監
工商網監
評論