") 剖析OpenHarmony3.0編譯構(gòu)建流程
剖析OpenHarmony3.0編譯構(gòu)建流程

早就打算研究下 OH3.0 的編譯框架了,最近一直在搞移植,總算有點(diǎn)進(jìn)展了,抽個(gè)空來(lái)分析下 3.0 的編譯框架。
大體看了下和 2.0 的差別不是特別大:《OpenHarmony 2.0 Canary編譯構(gòu)建流程》。
OHOS3.0 的打包鏡像腳本由原來(lái) 2.0 的 buildadapteruild_image.sh,全部修改替換為 buildohosimagesuild_image.py,將打包 image 鏡像的部分制作成 build_target。
以前是通過(guò) shell 腳本來(lái)調(diào)用,現(xiàn)在是通過(guò) gn 和 ninja 來(lái)調(diào)用。主要文件在 buildohosimages 這個(gè)文件夾下。
沒(méi)有修改的部分就不說(shuō)了,有需要的可以看我之前的帖子 這篇主要說(shuō)下不一樣的地方,看 OH3.0 是如何將編譯好的文件打包成鏡像的。
增加編譯參數(shù)
3.0 之后在 builduild_scriptsuild_common.sh 增加了 build_cmd+=" build_target=images"。
這句的意思約等于在執(zhí)行默認(rèn)編譯命令 ./build.sh --product-name Hi3516DV300 會(huì)有個(gè)默認(rèn)的參數(shù) --build-target images。
具體流程是這樣的:
builduild_scriptsuild_common.sh→buildcoregnBUILD.gn→buildohosimagesBUILD.gn
action_with_pydeps("${_platform}_${_image_name}_image"){
script="http://build/ohos/images/build_image.py"
depfile="$target_gen_dir/$target_name.d"
deps=["http://build/ohos/packages:${_platform}_install_modules"]
image_config_file=
"http://build/ohos/images/mkimage/${_image_name}_image_conf.txt"
output_image_file="$current_platform_dir/images/${_image_name}.img"
image_input_path="$current_platform_dir/${_image_name}"
if(_image_name=="userdata"){
image_input_path="$current_platform_dir/data"
}
sources=[
image_config_file,
system_module_info_list,
system_modules_list,
]
outputs=[output_image_file]
args=[
"--depfile",
rebase_path(depfile,root_build_dir),
"--image-name",
_image_name,
"--input-path",
rebase_path(image_input_path,root_build_dir),
"--image-config-file",
rebase_path(image_config_file,root_build_dir),
"--output-image",
rebase_path(output_image_file,root_build_dir),
"--build-image-tools-path",
rebase_path(build_image_tools_path,root_build_dir),
]
if(sparse_image){
args+=["--sparse-image"]
}
}
通常情況下,gn 會(huì)使用 action 運(yùn)行一個(gè)腳本來(lái)生成一個(gè)文件,但是這里使用的是 action_with_pydeps,應(yīng)該也是內(nèi)置的目標(biāo)類型。查看官方手冊(cè)是這么說(shuō)明的:
輸入和文件,將操作讀取(或執(zhí)行)的所有文件列為 inputs:
-
僅按從屬目標(biāo)列出輸入是不夠的。它們必須由使用它們的目標(biāo)直接列出,或者由 depfile 添加。
-
非系統(tǒng) Python 導(dǎo)入是輸入!對(duì)于導(dǎo)入此類模塊的腳本,請(qǐng)使用 action_with_pydeps 來(lái)確保將所有依賴的 Python 文件捕獲為輸入。
image_list=[
"system",
"vendor",
"userdata",
"updater",
]
foreach(_image_name,image_list){......}
調(diào)用 python 腳本
既然知道了 img 鏡像是由 buildohosimagesuild_image.py 來(lái)創(chuàng)建的,那就來(lái)分析下這個(gè) python 腳本。
ifos.path.exists(args.output_image_path):
os.remove(args.output_image_path)#刪除之前生成的鏡像文件夾
ifargs.image_name=='userdata':
_prepare_userdata(args.input_path)#準(zhǔn)備好userdata.img需要的文件
ifos.path.isdir(args.input_path):
_make_image(args)
_dep_files=[]
for_root,_,_filesinos.walk(args.input_path):
for_filein_files:
_dep_files.append(os.path.join(_root,_file))
build_utils.write_depfile(args.depfile,
args.output_image_path,
_dep_files,
add_pydeps=False)
===================================================================
def_make_image(args):
ifargs.image_name=='system':
_prepare_root(args.input_path)#準(zhǔn)備好system.img需要的文件
elifargs.image_name=='updater':
_prepare_updater(args.input_path)#準(zhǔn)備好updater.img需要的文件
image_type="raw"
ifargs.sparse_image:
image_type="sparse"
mk_image_args=[
args.input_path,args.image_config_file,args.output_image_path,
image_type
]
env_path="../../build/ohos/images/mkimage"
ifargs.build_image_tools_path:
env_path='{}:{}'.format(env_path,args.build_image_tools_path)
os.environ['PATH']='{}:{}'.format(env_path,os.environ.get('PATH'))
mkimages.mk_images(mk_image_args)#而真正制作鏡像使用的下面的函數(shù)
===================================================================
#buildohosimagesmkimagemkimages.py
defmk_images(args):
......
if"system.img"indevice:
src_dir=build_rootdir(src_dir)
mkfs_tools,mk_configs=load_config(config_file)
mk_configs=src_dir+""+device+""+mk_configs
res=run_cmd(mkfs_tools+""+mk_configs)#制作鏡像命令使用的是mkfs_tools
===================================================================
if"ext4"inmk_configs:
fs_type="ext4"
mkfs_tools="mkextimage.py"#而mkfs_tools根據(jù)文件系統(tǒng)類型,分別調(diào)用對(duì)應(yīng)的python腳本
elif"f2fs"inmk_configs:
mkfs_tools="mkf2fsimage.py"
fs_type="f2fs"
===================================================================
#buildohosimagesmkimagemkextimage.py#制作ext4文件系統(tǒng)
defbuild_run_mke2fs(args):
.....
blocks=int(int(args.fs_size)/BLOCKSIZE)
mke2fs_cmd+=("mke2fs"+str(mke2fs_opts)+"-t"+FS_TYPE+"-b"
+str(BLOCKSIZE)+""+args.device+""+str(blocks))
res=run_cmd(mke2fs_cmd)# mke2fs:制作文件系統(tǒng)
===================================================================
defbuild_run_e2fsdroid(args):
......
e2fsdroid_cmd+=("e2fsdroid"+e2fsdroid_opts+"-f"+
args.src_dir+"-a"+args.mount_point+
""+args.device)
res=run_cmd(e2fsdroid_cmd)# e2fsdroid:制作鏡像文件
無(wú)論前面執(zhí)行了什么操作,最終都是為了執(zhí)行 mke2fs、e2fsdroid。
關(guān)于這兩個(gè)命令:
-
mke2fs:Linux 下的命令,用于建立 ext 文件系統(tǒng)。
-
e2fsdroid:來(lái)自三方庫(kù),third_partye2fsprogs。
詳情可以參考:
http://e2fsprogs.sourceforge.net
-
Linux
+關(guān)注
關(guān)注
88文章
11760瀏覽量
219014 -
編譯
+關(guān)注
關(guān)注
0文章
694瀏覽量
35158 -
OpenHarmony
+關(guān)注
關(guān)注
33文章
3952瀏覽量
21096
原文標(biāo)題:OpenHarmony3.0編譯構(gòu)建流程!
文章出處:【微信號(hào):gh_834c4b3d87fe,微信公眾號(hào):OpenHarmony技術(shù)社區(qū)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
簡(jiǎn)單高效的鴻蒙編譯提速技巧

基于凌羽派的OpenHarmony北向應(yīng)用開(kāi)發(fā):Hello World 示例應(yīng)用
基于凌羽派的OpenHarmony北向應(yīng)用開(kāi)發(fā):Hello World 示例應(yīng)用






【OpenHarmony快速入門(mén)】本期視頻將介紹應(yīng)用開(kāi)發(fā)初學(xué)者如何構(gòu)建一個(gè)簡(jiǎn)單的應(yīng)用。
【瑞薩RA × Zephyr評(píng)測(cè)】Zephyr RTOS保姆級(jí)環(huán)境構(gòu)建與編譯下載踩坑版
電子工程師必看:TUSB501-Q1 USB 3.0轉(zhuǎn)接驅(qū)動(dòng)器深度剖析
SN75LVPE3410:四通道PCI - Express 3.0線性轉(zhuǎn)接驅(qū)動(dòng)器的深度剖析
貢獻(xiàn) OpenHarmony 庫(kù)關(guān)鍵配置
在 Windows 上編譯 KiCad
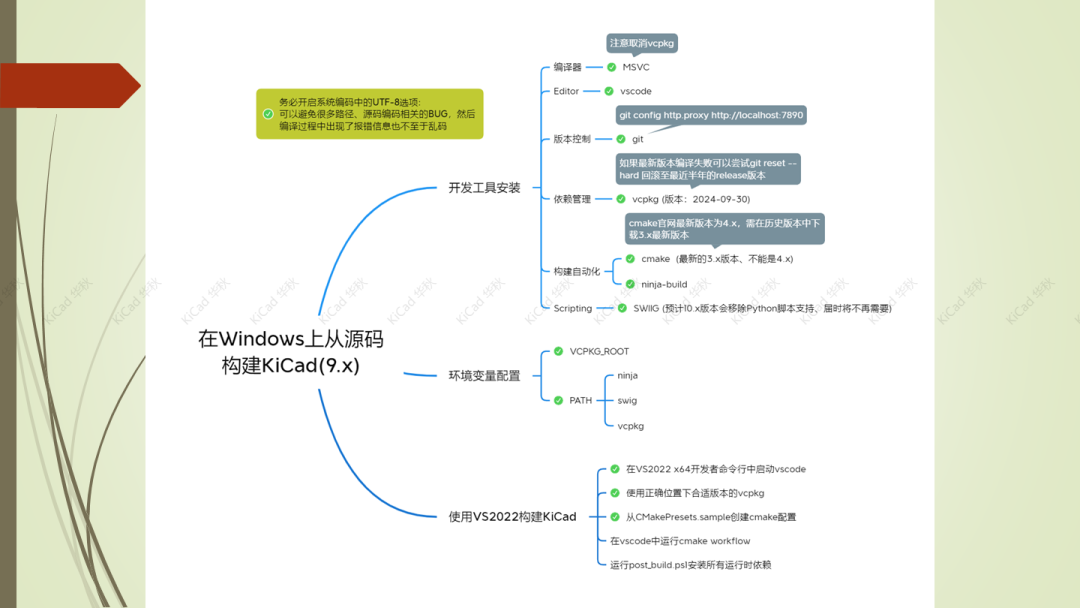
KiCad直播活動(dòng)(三):在 Windows上編譯KiCad 手把手教您編譯/構(gòu)建 KiCad 源碼




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論