") 以己之長攻彼之短!FPGA在機器人市場如何突圍?
以己之長攻彼之短!FPGA在機器人市場如何突圍?

上一期中,聊到MCU在機器人行業(yè)中的發(fā)展時提到,目前在工業(yè)機器人和服務(wù)機器人上用量最多的是MCU。隨著工業(yè)領(lǐng)域每一步自動化升級,機器人所需的運算效能也同步增長,各種高效能要求,人機協(xié)同應(yīng)用以及各類即時運算都要求機器人除了提供精準的電機控制外還能兼顧靈活性和拓展性。
顯然,FPGA廠商是不會任由MCU靠著電機控制的紅利大刀闊斧收割機器人市場的。目前工業(yè)機器人有多軸化和協(xié)同化的發(fā)展趨勢,這種靈活性和拓展性要求都是為了機器人能夠執(zhí)行多種精密復雜的擬人動作。在這種發(fā)展趨勢下工業(yè)機器人的電機及軸數(shù)都必須增加,當其中一個軸旋轉(zhuǎn)到特定角度時,與其同處一個連動系統(tǒng)的軸也須旋轉(zhuǎn)至相應(yīng)的正確角度,這樣的要求下,不同系統(tǒng)之間的搭配協(xié)調(diào)也變得格外重要。
FPGA可以應(yīng)用在分散控制的小節(jié)點上,也可以在大節(jié)點上應(yīng)用更高效能的FPGA SoC。通過FPGA控制的系統(tǒng)最明顯的優(yōu)勢點就是驅(qū)動反應(yīng)時間會大大縮短,對整個系統(tǒng)的運行速度而言會是一個大提升。復雜的多軸運算需求將FPGA的擴展性及運作效能優(yōu)勢凸顯,在單一節(jié)點運作的MCU在應(yīng)對這種高效能需求時會顯得乏力。而DSP雖然有更高的處理效能,但在拓展性上仍給了FPGA一定的喘息空間。如何充分利用好高效能和高拓展性優(yōu)勢成了FPGA在和MCU,DSP三足鼎立的機器人市場中突圍的關(guān)鍵點。
機器人FPGA高效能運控應(yīng)用

(Artix-7 FPGA,Xilinx)
單從Artix-7 FPGA來看提供了高性能的功耗比結(jié)構(gòu)(約50%)、收發(fā)器線速、DSP處理能力以及AMS集成。215K的邏輯單元和 AXI IP以及模擬混合信號集成對給予了系統(tǒng)足夠高的可編程集成性。

(Zynq-7000 SoC,Xilinx)
而Zynq-7000則是采用與 28nm Artix-7可編程邏輯配對的單核ARM Cortex-A9處理器,同時提供6.25Gb/s收發(fā)器,在電機控制與嵌入式視覺等工業(yè)應(yīng)用上既能控制成本又能優(yōu)化系統(tǒng)集成。
基于上述元件構(gòu)成的機器人控制Versal AI Edge,可以從視覺和非視覺傳感器進行元數(shù)據(jù)處理執(zhí)行低時延電機控制和確定性聯(lián)網(wǎng),以實現(xiàn)整個系統(tǒng)的同步。對于需要移動功能的機器人,可加速動作規(guī)劃滿足導航需求。這種通過控制環(huán)路的并行處理,對可擴展的運動軸數(shù)量進行精確確定性控制,在多軸運動上具有很高的拓展性。
不僅是Xilinx,另一家FPGA大廠Altera也是用28/20nm FPGA打入機器人控制市場。基于FPGA以及FPGA SoC的設(shè)計,除了運動控制,傳感器總線管理,攝像頭總線管理包括HMI等等都被集成到一起。通過高層次的集成,縮小物理尺寸并降低功耗。這樣的控制似乎更能體現(xiàn)機器人的智能性和適應(yīng)性。
機器視覺FPGA可拓展性應(yīng)用
具備強大平行運算功能的FPGA,不只能應(yīng)付多軸機器人運動的需求,也能實現(xiàn)機器視覺系統(tǒng)高彈性的靈活配置。lattice就是這樣的策略,lattice的FPGA雖然也涉及多軸電機控制,但主要應(yīng)用放在了機器視覺上。
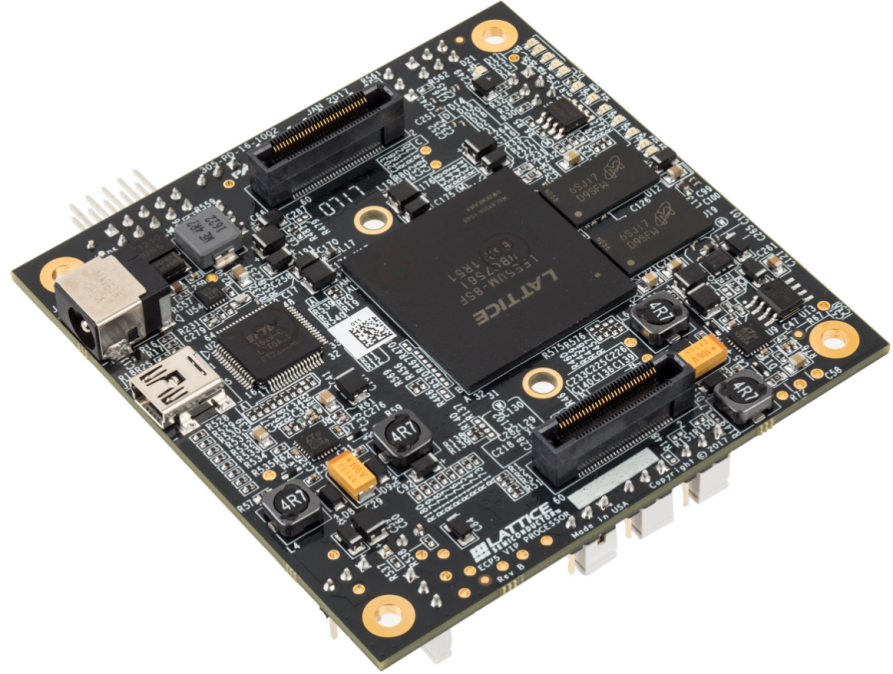
(ECP5 VIP處理器板,lattice)
FPGA與生俱來的可編程優(yōu)勢使其能支援多種工業(yè)通訊協(xié)定,也讓FPGA成為用來擴充通訊的不錯選擇。從ECP5處理器板上來看,它的輸入和輸出板之間能夠組合和匹配,以連接到各類圖像傳感器和顯示屏,最大限度的提供靈活的互連性。
ECP5 VIP處理器板上帶了ECP5-85 FPGA,專門圖像信號進行處理處理。單獨說一下ECP5 VIP中的VIP,是lattice面向開發(fā)者用于嵌入式視覺應(yīng)用的模塊化視頻接口平臺。就ECP5 FPGA本身特性而言,178個I/O、20個差分I/O對、4個5G SERDES通道和85K LUT,如此多的I/O資源對機器人設(shè)計者而言也是不小的助力。
可能不同廠家能提供給機器人客戶的拓展性不一樣,但FPGA固有的高拓展性優(yōu)勢是一定的。
可能不同廠家能提供給機器人客戶的拓展性不一樣,但FPGA固有的高拓展性優(yōu)勢是一定的。
寫在最后
不難看出FPGA依靠高效能和拓展性在機器人行業(yè)已經(jīng)有相當大的發(fā)揮。不管是依靠高效能處理能力從MCU手中奪取電機控制的份額,還是憑借拓展性大舉進軍機器視覺與DSP正面對壘,在機器人市場中FPGA與MCU,DSP可謂是互不相讓,暗流涌動。畢竟誰都不愿意在這個大市場上被壓一頭。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
FPGA
+關(guān)注
關(guān)注
1660文章
22412瀏覽量
636379 -
機器視覺
+關(guān)注
關(guān)注
165文章
4798瀏覽量
126073 -
工業(yè)機器人
+關(guān)注
關(guān)注
91文章
3534瀏覽量
98196
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
再談低溫燒結(jié)銀的應(yīng)用:從春晚四家機器人出鏡的幕后推手說起
半導體三重驅(qū)動,低溫燒結(jié)銀市場年增速超 40%,2025–2030 年進入規(guī)模化替代傳統(tǒng)焊料的關(guān)鍵期。
總結(jié):春晚四家機器人的驚艷表現(xiàn),是AS系列低溫燒結(jié)銀在電機、傳感器、芯片、功率模塊四大核心環(huán)節(jié)賦能
發(fā)表于 02-17 14:07
工業(yè)機器人TOP1,切入人形機器人賽道,意欲何為?
滲透率同比提升2個百分點。埃斯頓機器人實現(xiàn)近20%的同比增長,占中國機器人市場份額10.3%,成為首個登頂中國機器人市場的國產(chǎn)

機器人內(nèi)部零配件的生產(chǎn)加工廠從哪找?
機器人內(nèi)部零配件生產(chǎn)廠家哪里找?東莞力存科技為您揭秘數(shù)控車床加工的關(guān)鍵要素
隨著機器人文化在中國的快速普及,機器人市場呈現(xiàn)出爆發(fā)式增長態(tài)勢。
發(fā)表于 12-09 18:22
探索RISC-V在機器人領(lǐng)域的潛力
探索RISC-V在機器人領(lǐng)域的潛力
測評人:洄溯
測評時間: 2025年11月
測評對象: MUSE Pi Pro開發(fā)板(基于進迭時空K1系列高性能RISC-V CPU)
一、 開篇引言
發(fā)表于 12-03 14:40
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
時人臉識別、物體檢測與跟蹤等。同時,在高負載下,芯片溫度穩(wěn)定在65℃左右,證明了其優(yōu)異的高能效比和低發(fā)熱特性,非常適合對功耗和散熱敏感的機器人產(chǎn)品。
為什么RK3576是機器人開發(fā)的理想之
發(fā)表于 10-29 16:41
小蘿卜機器人的故事
經(jīng)過我的申請,
馬老師發(fā)放了,
小蘿卜機器人的,
開發(fā)權(quán)限,
原來的小蘿卜公司,
因為經(jīng)營不善倒閉,
作為科研產(chǎn)品,
幾個技術(shù)對此惋惜,
自掏腰包,
要讓小蘿卜機器人,
再生,
每次聽到小蘿卜說
發(fā)表于 10-23 05:24
自制巡線解迷宮機器人(上)
作為上層決策單元,是整個機器人硬件架構(gòu)中的核心。在本次的巡線解迷宮機器人中,它主要用于采樣紅外反射傳感器回傳的模擬數(shù)據(jù)并根據(jù)PID算法進行數(shù)學運算,最后將計算結(jié)果以邏輯電平信號的形式反
發(fā)表于 10-20 10:39
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
幫助機器人實時修正重心,大幅降低翻倒風險。
在關(guān)節(jié)運動控制上,磁傳感器芯片實現(xiàn) “毫米級精度保障”。以昆泰芯 KTM59 系列磁編碼器的離軸應(yīng)用為例,其非接觸式磁信號捕捉技術(shù),解決了傳統(tǒng)光學編碼器
發(fā)表于 08-26 10:02
關(guān)于機器人以及人形機器人的在認知
機器人無疑伴隨著AI人工智能已成為智能時代不二人選的平臺載體。為了更好的讓人們盡快體驗享受到人工智能機器人帶來的快樂與幸福。而不僅僅一直是美好未來的展望。我們從事機器人

工業(yè)機器人的特點
生產(chǎn)可以提高產(chǎn)品品質(zhì)。通過設(shè)定相同的程序,機器人可實現(xiàn)重復操作,保證了產(chǎn)品的標準化;在精細化生產(chǎn)方面,工業(yè)機器人可實現(xiàn)低于0.1毫米的運動精度,可以完成精細的雕刻工作。提高產(chǎn)出
由于機器人
發(fā)表于 07-26 11:22
明遠智睿SSD2351開發(fā)板:語音機器人領(lǐng)域的變革力量
接口則讓語音機器人可以連接到互聯(lián)網(wǎng),實時獲取最新的信息,增強其智能性和交互能力。 在實際應(yīng)用場景中,以智能客服語音機器人為例。SSD2351開發(fā)板可以驅(qū)動語音識別模塊,準確識別用戶的問
發(fā)表于 05-28 11:36
盤點#機器人開發(fā)平臺
Athena機器人****開發(fā)平臺思嵐推出Athena機器人開發(fā)平臺,有望主導機器人開發(fā)平臺未來市場-電子發(fā)燒友網(wǎng)AUTO CUBEROS機器人
發(fā)表于 05-13 15:02
詳細介紹機場智能指路機器人的工作原理
路徑。路徑規(guī)劃算法會考慮多種因素,如距離最短、避開人流密集區(qū)域、優(yōu)先選擇寬闊通道等,以確保旅客能夠快速、順暢地到達目的地。
實時導航與避障 :在機器人引導旅客的過程中,導航系統(tǒng)會實時監(jiān)控機器人
發(fā)表于 05-10 18:26
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統(tǒng)
ROS的 目的 :ROS支持通用庫,是通信總線,協(xié)調(diào)多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速開發(fā)
發(fā)表于 04-30 01:05
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+內(nèi)容初識
機器人技術(shù)的飛速發(fā)展,ROS 2 作為其核心工具之一,為開發(fā)者提供了強大的支持。與傳統(tǒng)的理論書籍不同,本書深入淺出地講解了 ROS 2 的架構(gòu)、開發(fā)流程以及在智能機器人項目中的應(yīng)用,以
發(fā)表于 04-27 11:24



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論