") pld控制原理是什么
pld控制原理是什么

pld控制原理是什么
編程數(shù)據(jù)存儲(chǔ)單元以陣列形式分布在FPGA中,一般把所有超過某一集成度PLD器件都稱為CPLD。 編程數(shù)據(jù)流由開發(fā)軟件自動(dòng)生成,數(shù)據(jù)以串行方式移入移位寄存器圍繞一個(gè)可編程互連矩陣構(gòu)成,對(duì)于可編程邏輯器件PLD能完成任何數(shù)字器件的功能。
pld控制原理:
邏輯控制
確定積分時(shí)間常數(shù)
計(jì)數(shù)控制
步進(jìn)(順序)控制
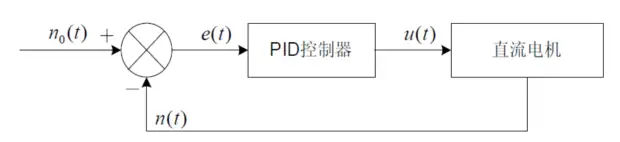
PID控制
PLC具有數(shù)據(jù)處理、通信和聯(lián)網(wǎng)能力
PID控制器參數(shù)的工程整定方法可以按照工程經(jīng)驗(yàn)公式對(duì)控制器參數(shù)進(jìn)行整定,再對(duì)PID參數(shù)進(jìn)行微調(diào),直至滿足要求。
本文綜合整理自電工之家 運(yùn)控伺服 電工電氣學(xué)習(xí)
責(zé)任編輯:pj
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
FPGA
+關(guān)注
關(guān)注
1662文章
22473瀏覽量
638298 -
控制器
+關(guān)注
關(guān)注
114文章
17841瀏覽量
194732 -
PLD
+關(guān)注
關(guān)注
6文章
230瀏覽量
61334 -
可編程邏輯器件
+關(guān)注
關(guān)注
5文章
145瀏覽量
31017
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
步進(jìn)電機(jī)的位置控制與速度控制
步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換為角位移或線位移的執(zhí)行元件,其 位置控制 與 速度控制 是兩大核心應(yīng)用。雖然兩者在實(shí)現(xiàn)上緊密相關(guān),但控制目標(biāo)和策略有本質(zhì)區(qū)別。 一、 核心原理回顧 步進(jìn)電機(jī)的運(yùn)動(dòng)由

立宏安全#SM-602可編程安全控制器#LHS可編程安全控制器
設(shè)計(jì)的理念我們一定要記住三個(gè)詞:
(1)冗余
(2)相異
(3)自檢測
SM-602安全控制器端子接線說明
SM-602安全控制器軟件操作說明
如何架構(gòu)安全回路可靠性達(dá)到PLd以上,安全

伺服電機(jī)的控制方式簡述
伺服電機(jī)作為自動(dòng)化控制系統(tǒng)的核心執(zhí)行元件,其控制方式直接決定了設(shè)備的動(dòng)態(tài)響應(yīng)、定位精度和運(yùn)行效率。隨著工業(yè)4.0和智能制造的發(fā)展,伺服控制技術(shù)已從傳統(tǒng)的模擬量控制演變?yōu)閿?shù)字化、網(wǎng)絡(luò)化的

PWM控制器的控制方法
總結(jié)了脈寬調(diào)制(PWM ) 技術(shù)的幾種控制方法 敘述了它們的基本工作原理 并分析了它們的優(yōu)缺 點(diǎn)。介紹一種非線性控制方法 單周控制法 通過分析對(duì)比得出單周控制法能在每個(gè)周期內(nèi)消除
發(fā)表于 10-23 16:17
?3次下載
CW32電機(jī)控制基礎(chǔ)——PID控制原理
將偏差的比例(Proportion)、積分(Integral)和微分(Differential)通過線性組合構(gòu)成控制量,用這一控制量對(duì)被控對(duì)象進(jìn)行控制,這樣的控制器稱PID
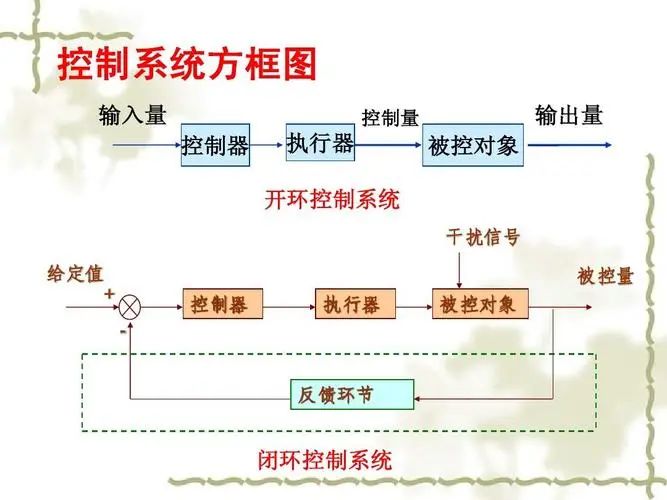
自動(dòng)控制系統(tǒng)中什么叫開環(huán)控制,半閉環(huán)控制,閉環(huán)控制?三者有何區(qū)別?
在自動(dòng)控制系統(tǒng)中,開環(huán)控制、半閉環(huán)控制和閉環(huán)控制是三種基礎(chǔ)的控制方式,它們以不同的信息處理機(jī)制實(shí)現(xiàn)系統(tǒng)調(diào)節(jié),廣泛應(yīng)用于工業(yè)自動(dòng)化、機(jī)器人、數(shù)
舵機(jī)如何控制?
舵機(jī)是一種高精度的角度控制執(zhí)行器,廣泛應(yīng)用于機(jī)器人、遙控模型、自動(dòng)化設(shè)備等場景。其控制核心是通過 PWM(脈沖寬度調(diào)制)信號(hào) 調(diào)節(jié)角度,配合內(nèi)部閉環(huán)反饋實(shí)現(xiàn)精準(zhǔn)定位。以下從原理、控制方式、關(guān)鍵參數(shù)
常用控制柜的分類
在工業(yè)自動(dòng)化和電氣控制領(lǐng)域,控制柜是關(guān)鍵設(shè)備的核心,負(fù)責(zé)系統(tǒng)控制、監(jiān)測與保護(hù)。隨著技術(shù)發(fā)展和應(yīng)用擴(kuò)展,控制柜種類日益豐富。以下是常見控制柜的

英特爾Agilex FPGA在雙軸電機(jī)控制系統(tǒng)的應(yīng)用
Cat. 3 PLd 安全等級(jí),更以 Agilex 5 SoC FPGA 為核心載體,巧妙融合基于模型的開發(fā)方式與靈活且可移植的安全架構(gòu),為工業(yè)控制領(lǐng)域的安全與效能平衡提供了硬核技術(shù)支撐。

強(qiáng)實(shí)時(shí)運(yùn)動(dòng)控制內(nèi)核MotionRT750(一):驅(qū)動(dòng)安裝 #正運(yùn)動(dòng)技術(shù) #正運(yùn)動(dòng) #運(yùn)動(dòng)控制 #
運(yùn)動(dòng)控制
正運(yùn)動(dòng)技術(shù)
發(fā)布于 :2025年07月03日 14:16:07

強(qiáng)實(shí)時(shí)運(yùn)動(dòng)控制內(nèi)核MotionRT750(一):CPU配置 #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制 #正運(yùn)動(dòng) #
運(yùn)動(dòng)控制
正運(yùn)動(dòng)技術(shù)
發(fā)布于 :2025年07月03日 14:15:14
油液監(jiān)測設(shè)備維護(hù)管理導(dǎo)則
維護(hù)管理導(dǎo)則本管理導(dǎo)則是對(duì)對(duì)旗下產(chǎn)品PLD-0201、PLD-810/810S、PLD-0202、PLD-0203、PLD-601、PMT-


工程機(jī)械控制器廠家 控制器國產(chǎn)替代 #國產(chǎn)控制器#控制器廠家#控制器品牌
控制器
長沙碩博電子科技股份有限公司
發(fā)布于 :2025年04月29日 14:15:05
FOC控制算法詳解
一、基本概念:FOC(field-orientedcontrol)為磁場導(dǎo)向控制,又稱為矢量控制(vectorcontrol),是一種利用變頻器(VFD)控制三相電機(jī)的技術(shù),利用調(diào)整變頻器的輸出頻率
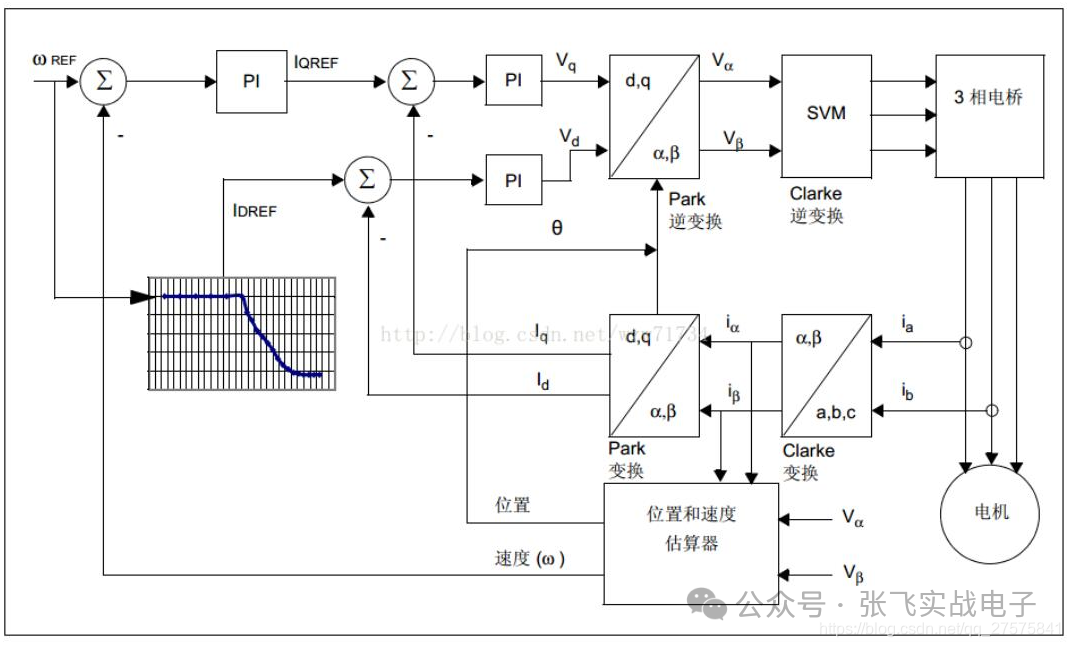
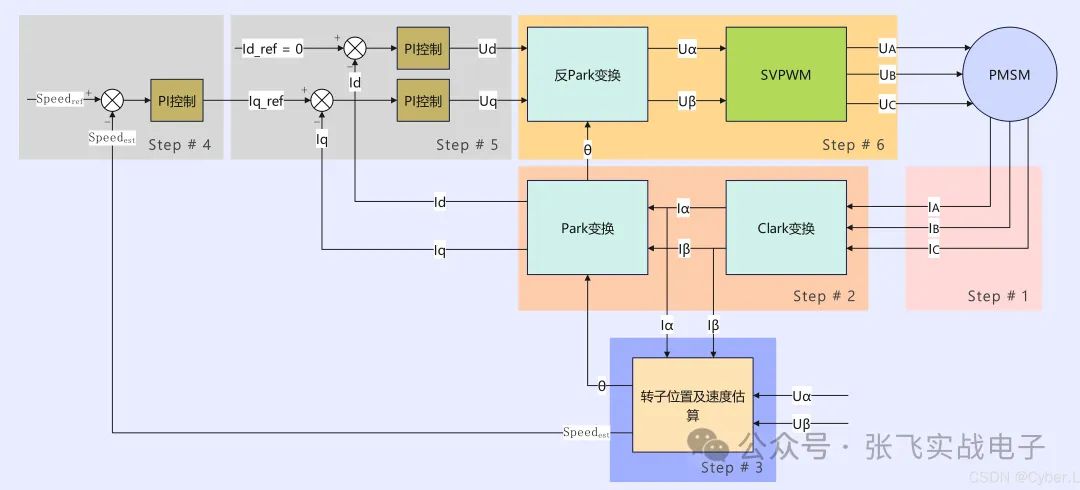
【電機(jī)控制】PMSM無感FOC控制
0.前言前段時(shí)間做了一個(gè)永磁同步電機(jī)無感控制的項(xiàng)目,想總結(jié)一下,做個(gè)比較基礎(chǔ)易懂的文章方便大家入門,主要介紹以下幾個(gè)方面:1.FOC控制算法、坐標(biāo)變換2.PID控制器3.SVPWM4.過調(diào)制5.



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論