 EV中自動駕駛的功耗挑戰
EV中自動駕駛的功耗挑戰

作者:Hirotaka Hara
Senior Distinguished Engineer
下一代汽車的車輛電子系統正在以電動化和自動駕駛為中心發展。圖中描述了車輛電控系統的演進。
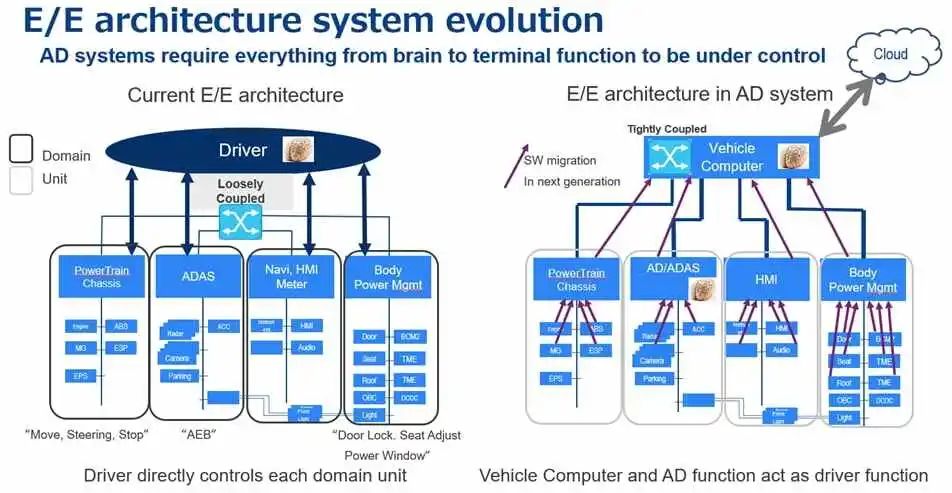
現有的車輛電子控制系統中,由于每個功能域由駕駛員直接控制,因此每個域之間的通信是松散耦合的,并且為了不受其它域的影響,域之間是相對獨立的。另一方面,自動駕駛時代的電控系統是由一個名為Vehicle computer的中央控制系統來代替駕駛員來控制自動駕駛功能,各域之間的通信會相對多一些(緊耦合),域之間的獨立性會低一些。
此外,隨著控制程序的規模呈指數級增長,安全的OTA(Over the air)變得至關重要,OTA的目標硬件將從終端硬件轉向中心硬件,以確保OTA的控制。(紫色箭頭)此外,中控系統與Cloud之間的通信也是系統的必備條件。
EV自動運轉中的電力影響
接下來,我們將討論EV中自動駕駛的功耗挑戰。
我們來考慮一下典型的EV汽車行駛100Km所需的電池容量。例如,如果您以EPA城市模式行駛,100公里時耗電量為14.6 KWh,但如果您以22.7 Km的平均時速在城市中行駛,100公里需要4.4小時。
這里考慮到目前的Robo taxi,假設整個自動駕駛功能耗電量為2KW左右,行駛4.4小時需要8.8 KWh的電量,如果這輛EV車的搭載電池為75KWh,那么在100Km自動行駛過程中,自動駕駛功能消耗了12%的電池容量。
為了讓這個電池容量的消耗降到1%以下,整個自動駕駛功能的功耗必須降到150W以下。在自動駕駛中,消耗最多計算功率的深度學習的低功耗是多么重要,從這個數字也可以看出。而且,隨著深度學習的應用領域今后也將不斷增加,這一改進在SDGs和ESG的觀點上也將變得更加重要。
邊緣設備異構計算中的性能優化
與數據中心中使用的CPU和GPU不同,邊緣設備的電源和目標成本受到嚴格限制。因此,在邊緣設備中,異構體系結構與硬件或特定應用處理器相結合,具有最適合目標應用的功能,是產品的關鍵。因此,在ADAS和AD領域,R-Car V系列提供硬件IP,可編程處理器和CPU的組合LSI。下圖顯示了R-Car V3H的硬件配置示例。
采用Streaming Architecture
ADAS和AD領域的深度學習引擎(CNN-IP)需要較高的TOPS值,CNN-IP的低功耗是決定整個芯片功率的一大因素。因此,Renesas采用了多種體系結構中能效最高的Streaming architecture。在Streaming Architecture中,CNN-IP最大限度地減少了對外部存儲器的訪問,并以低功耗在每個處理器元件(PE)和SRAM之間高效地傳輸數據。
瑞薩的ADAS/AD在執行深度學習時的LSI功率目標在前攝ECU中為5W或更低,在中央ADAS ECU中為30W或更低,這使得系統的風冷散熱成為可能。這些功率目標成為在量產普及車中實際應用ADAS/AD系統的重要指標。
瑞薩的AI架構
在自動駕駛領域,深度學習的應用將繼續推進,適應新的網絡將變得至關重要。因此,除了Streaming architecture以外,面向特定用途的添加了programmable processor的形式也被定義為面向汽車的AI computing architecture,并繼續進行開發。在Streaming processor側對占現狀調整的95%以上的卷積運算、Activation、Pooling處理等進行處理,在programmable processor側對應新的函數,尋求兼顧電力和靈活性。
最后,我將介紹瑞薩汽車AI解決方案的應用開發中不可或缺的開發工具。汽車AI需要不同的開發環境,包括相機,網關和中央ADAS,如下圖所示,我們與在R-Car聯盟多年合作的強大合作伙伴提供交鑰匙解決方案和應用開發工具。
有關更多信息,請訪問R-Car聯盟。
編輯:jq
-
OTA
+關注
關注
7文章
628瀏覽量
38286 -
Ev
+關注
關注
2文章
217瀏覽量
37032 -
自動駕駛
+關注
關注
793文章
14882瀏覽量
179837
原文標題:工程師說 | 新一代汽車深度學習架構趨勢
文章出處:【微信號:賽靈思,微信公眾號:Xilinx賽靈思官微】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
自動駕駛汽車如何實現自動駕駛

如何設計好自動駕駛ODD?
FCB-EV9520L+CM2001U如何破解自動駕駛視覺難題?
汽車自動駕駛的太陽光模擬應用研究

不同等級的自動駕駛技術要求上有何不同?
索尼FCB-EV9520L機芯如何賦能自動駕駛安全
塑造自動駕駛汽車格局的核心技術
太陽光模擬器 | 在汽車自動駕駛開發中的應用
自動駕駛汽車是如何準確定位的?

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

自動駕駛是為了“增強人”,還是為了“替代人”?
自動駕駛安全基石:ODD




 工商網監
工商網監
評論