 特斯拉事故頻發背后,自動駕駛測試能幫什么忙?
特斯拉事故頻發背后,自動駕駛測試能幫什么忙?

電子發燒友網報道(文/黃晶晶)近日,在第九屆EEVIA年度中國電子ICT媒體論壇暨2021產業和技術展望研討會上,NI資深汽車行業客戶經理郭堉分享了“平臺化測試方案應對無限自動駕駛測試場景”的演講。
自動駕駛的現狀與挑戰
我們知道汽車行業的三大愿意是零事故、零排放、零損耗。郭堉表示,我們的半導體技術起到非常關鍵的作用,例如激光雷達等感知技術幫助我們實現L2到L4級的自動駕駛。
目前自動駕駛主要有四個趨勢,一是電子電氣結構,從原來的傳感器都有ECU,到現在用中央域控制器進行處理,這個會帶來很多的新挑戰。二是目前的汽車法規不是特別完善,我們的場景庫拾建也不完善,這會給新的測試需求帶來挑戰。三是軟件定義汽車,例如特斯拉的OTA技術,通過軟件的投入和測試會顯得非常重要。四是AI和深度學習,部署在ADAS里的算法通過真實的道路場景去不斷優化這些算法,從而提升安全性,令消費者擁有更好的自動駕駛體驗。
郭堉解析,在這個V字型汽車測試研發和驗證流程中,左邊是設計環節,從最底層系統的要求,慢慢部署到每一個子部件的研發,左邊主要依賴于軟件,包括原型驗證的環節。右邊是從部件的測試,再上升到整車級的,比如NVH可靠性的測試。但以往都是更多精力投入在右邊的測試環節,尤其是整車測試,但是我們隨著ADAS技術的不斷完善,更需要的是左邊,也就是測試需求向左移,我們需要更多進行軟件測試,提高測試效率。
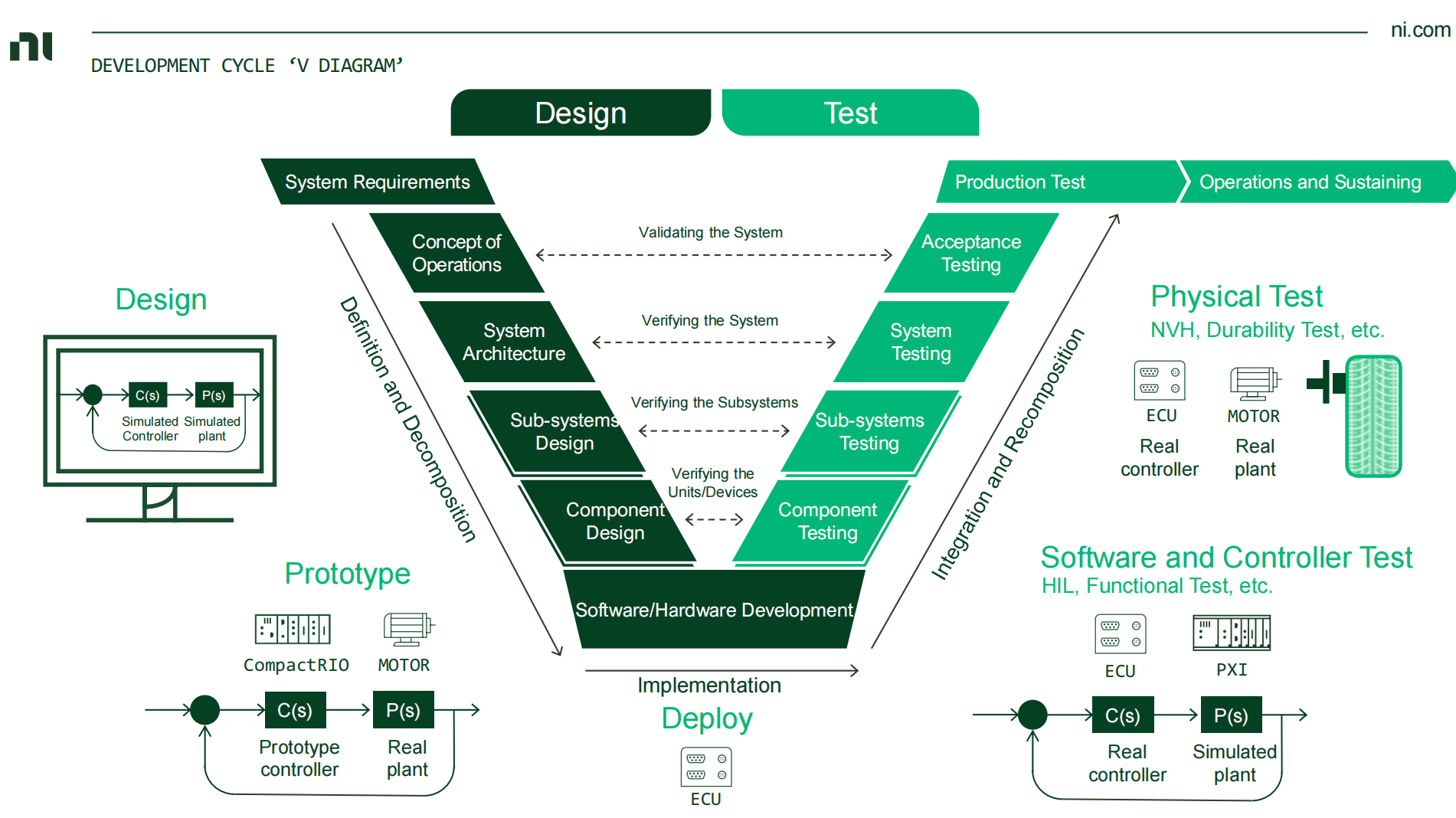
由此帶來的測試挑戰在于測試的復雜度日益增加,自動化測試硬件和軟件需要不斷迭代更新,包括提供完整的工具鏈。另外,測試開發流程的效率需要加強。因為今后汽車會向消費電子的模式去發展,就需要快速的驗證平臺,最大化測試效率。此外,還有更多的仿真。我們需要很多真實的場景不斷地訓練算法,如果部署很多車隊,讓它去跑真實的道路,要花費的成本和時間無法想象,因此我們就需要構建一個高保真度的軟件測試環境,去訓練AI的算法,識別目標物,從而達到避障和主動駕駛的功能等。
自動駕駛驗證測試流程
數字孿生與仿真測試
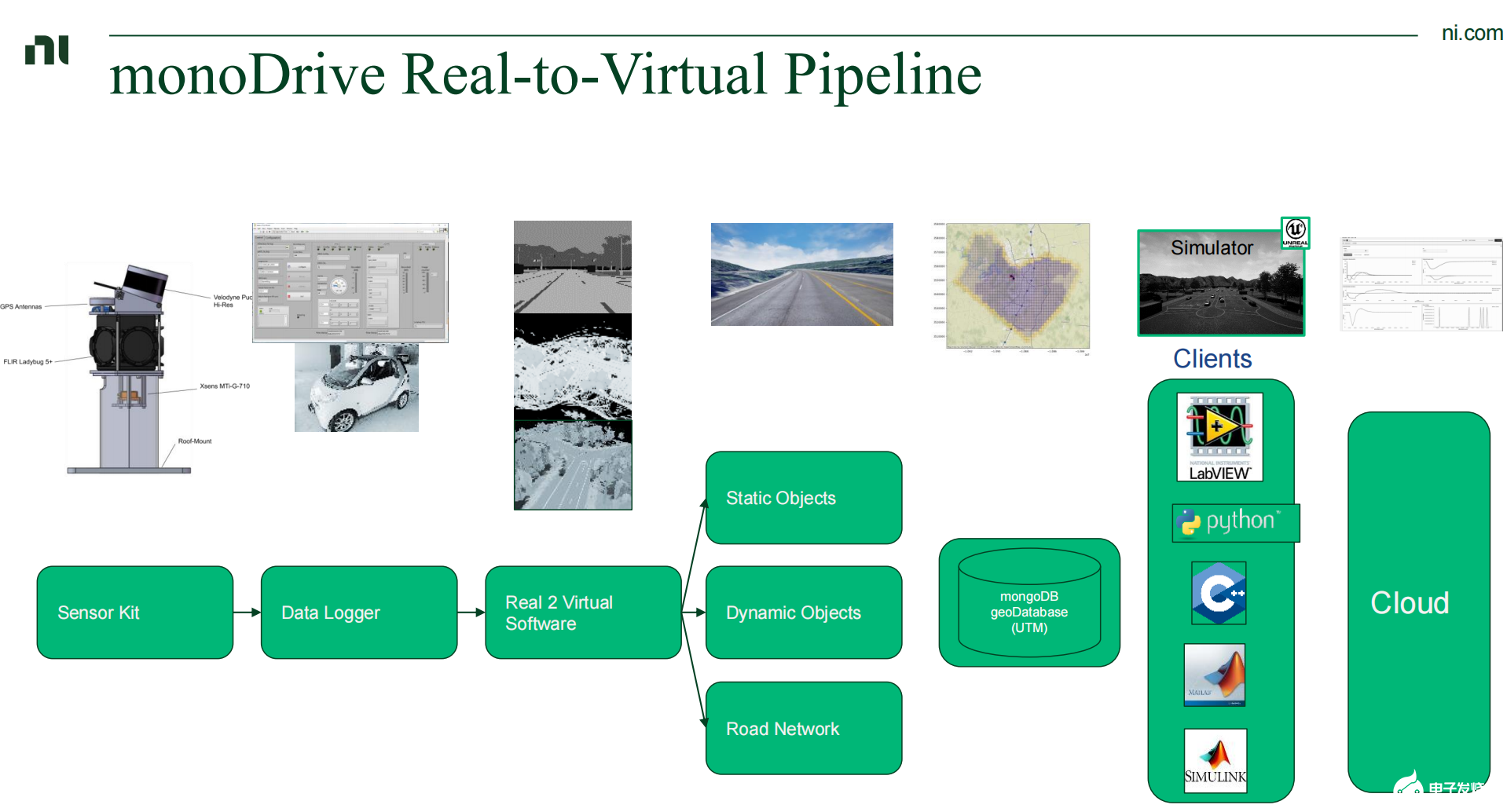
目前99.9%的測試都是通過仿真進行,那么仿真測試的數據可靠性就非常重要,怎么保證數據是真實的,可以跟真實的道路匹配,并且給傳感器一個真實的反饋。
NI在今年正式宣布收購了monoDrive公司,可以通過monoDrive的數據進行數據重構和孿生。郭堉分析,在實際效果中,我們看到,下圖是在美國奧斯汀實際錄制的場景,我們通過monoDrive進行數字孿生,重構為一個非常高保真度的場景,比如對面來車,可以還原出來,monoDrive可以把樹葉、欄桿、地面上的標志圖形完整地復現出來。目前只有monoDrive這個軟件可以做到。
 ?
?
另外不僅是道路的狀態,monoDrive也可以仿真天氣狀況,包括路面積水,路面積水狀況會影響我們反射的條件,這些反射條件會影響到傳感器的功能。monoDrive軟件甚至可以把路燈、垃圾筒表面、日落黃昏的參數系數、反射系數實時仿真出來。
道路信息記錄, 傳感器數據采集
NI也用軟件平臺做道路實時數據的記錄,目前很多算力可以支持12路攝像頭,甚至是高清攝像頭,只有這些數據都是同步被記錄下來,才是真實有效的。而對錄制的要求會有很多的挑戰,其中包括很多硬件接口。此外,我們面對的數據量是非常大的,NI提供了PXI平臺,硬件上具有豐富的接口,不僅支持攝像頭接口,還有車載以太網等,能夠保存所有數據,支持上傳云端,可進行數據壓縮、數據管理、數據回放等。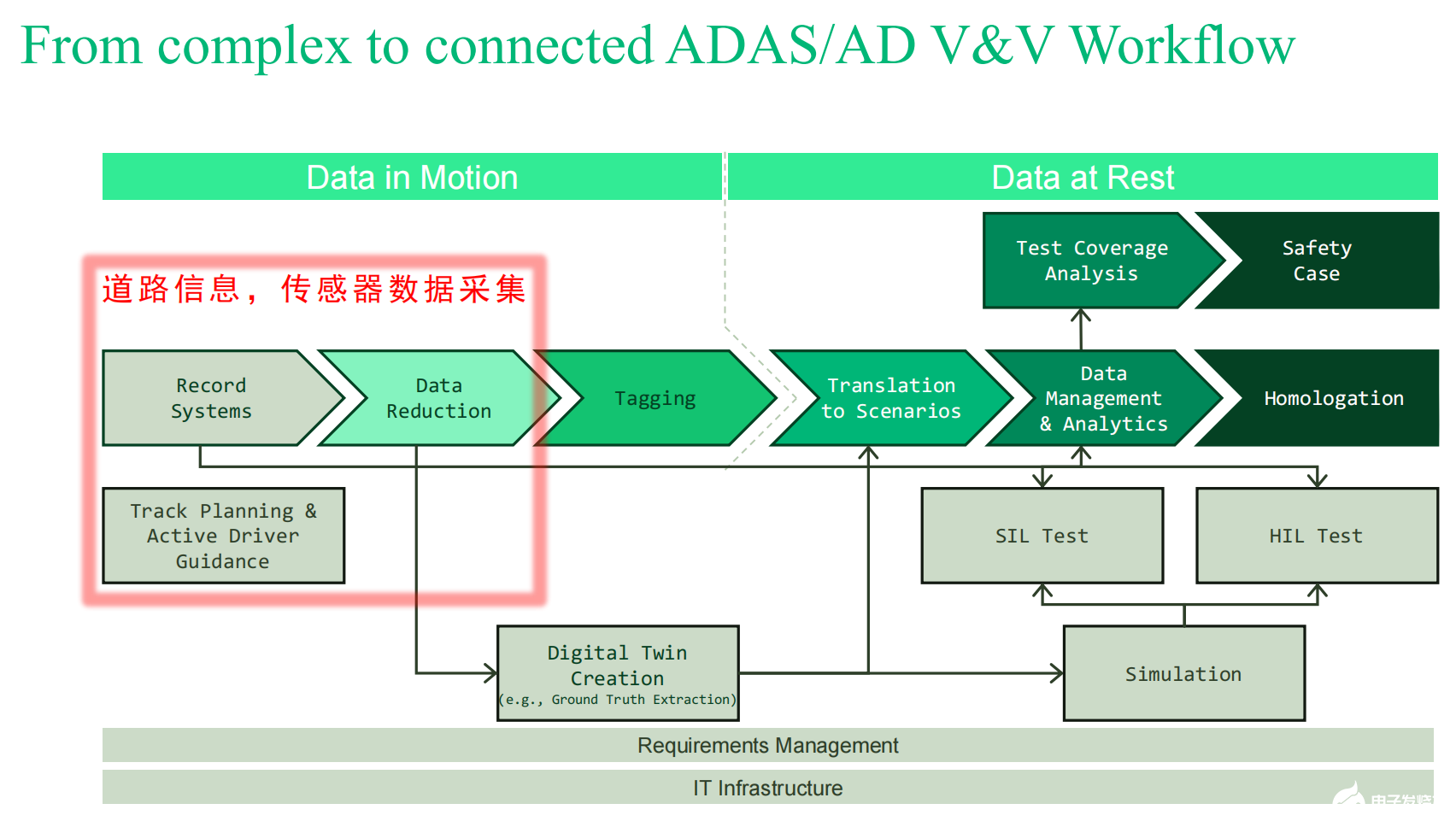
數據回放與硬件在環(HIL)
一般來說,測試對象是ECU里面的控制或算法,那就需要去模仿外圍的設備,讓ECU以為連接的是真實的電機。郭堉解析,NI提供包括FPGA板卡這樣的硬件,用軟件導入模型,部署到FPGA里面,FPGA板卡提供納秒級的運算。編輯到系統里面可以達到毫秒級的運算,就可以跑車輛動力學模型,真實的反饋車輛在虛擬場景中如何運轉。然后連到DUT,這就是用AI完整的鏈路和平臺,包括軟件去實現的一個框架。
NI的軟硬件平臺可以做到從研發開始到最后的生產部署,都用同樣的工具鏈去實現,對于一個工程師來講,就不需要去學習各種廠商不同的接口,學習各種廠商的硬件平臺的操作,學習新的軟件。用NI的平臺就可以實現整個從研發到部署的流程。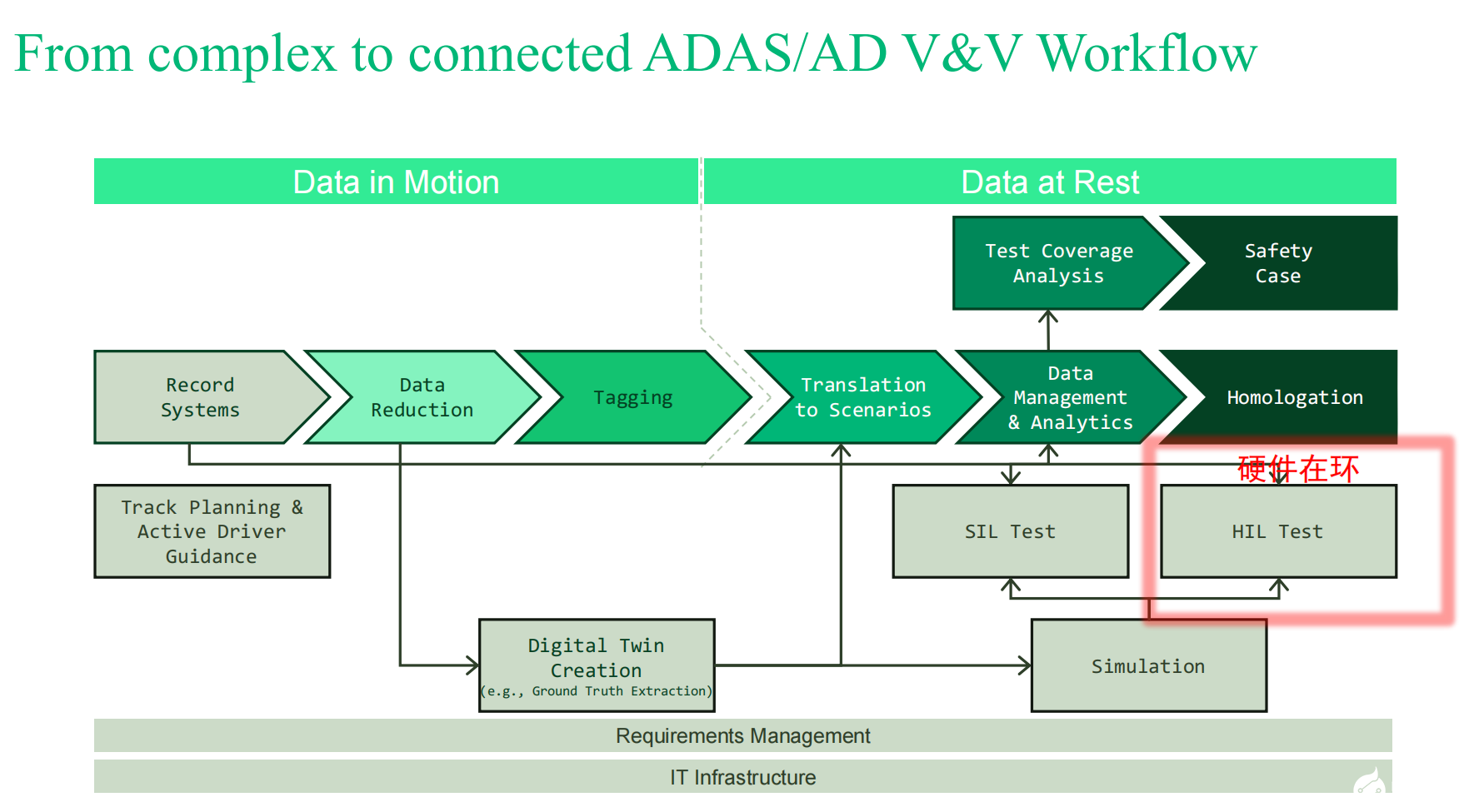
如今,NI攜手合作伙伴建立起強大的生態圈,合作伙伴包括云端的AWS、微軟云等等,以及眾多的集成商伙伴。在汽車行業的生態鏈中,NI不僅基于自己的硬件和軟件進行測試,也支持友商的接口,以開放的姿態,連接不同友商,不同協議,不同廠商的場景仿真軟件,一起攜手為客戶提供交鑰匙的解決方案。
-
測試
+關注
關注
9文章
6203瀏覽量
131371 -
NI
+關注
關注
19文章
1126瀏覽量
104858 -
自動駕駛
+關注
關注
793文章
14883瀏覽量
179910
發布評論請先 登錄
如何設計好自動駕駛ODD?
自動駕駛系統在遇到事故時是應該起作用還是立刻退出?

特斯拉的“哨兵模式”為何被告?解析自動駕駛隱私保護出路

自動駕駛仿真測試有什么具體要求?

一文讀懂特斯拉自動駕駛FSD從輔助到端到端的演進

自動駕駛事故如何判定?誰應負主要責任?

小馬智行三城開啟全天候自動駕駛測試
卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

自動駕駛技術測試有哪些?

自動駕駛技術落地前為什么要先測試?
蘿卜快跑在香港的自動駕駛測試區域再擴大
新能源車軟件單元測試深度解析:自動駕駛系統視角




 工商網監
工商網監
評論