") 關(guān)于Ardupilot移植的經(jīng)驗(yàn)分享
關(guān)于Ardupilot移植的經(jīng)驗(yàn)分享

Ardupilot移植經(jīng)驗(yàn)分享(1)簡要介紹了移植Ardupilot的思路,重點(diǎn)講述了下載編譯源碼的要點(diǎn)和搭建源碼閱讀環(huán)境的方法。下載編譯源碼,一方面是為了搭建源碼閱讀環(huán)境,另一方面是當(dāng)閱讀源碼遇到疑問時(shí),可以稍作修改后進(jìn)行調(diào)試驗(yàn)證。搭建便捷高效的源碼閱讀環(huán)境,更是非常重要。若是選擇的源碼閱讀器不能進(jìn)行函數(shù)跳轉(zhuǎn),不能查看函數(shù)調(diào)用棧,不能快速導(dǎo)航到目標(biāo)函數(shù)或變量,閱讀70萬行ardupilot代碼的工作將寸步難行。這就是筆者花費(fèi)很大的篇幅來講解的原因,沒看過第一篇的同學(xué)先點(diǎn)擊上面的鏈接噢。
下面開始閱讀源碼之旅。剛才提到,ardupilot工程有700k行代碼,這個(gè)統(tǒng)計(jì)出版官方開發(fā)者wiki。
雖然龐大的體量令人望而生畏,但若明確了目標(biāo),把握了脈絡(luò),閱讀也非難事。下面讓筆者按著當(dāng)初的思路,分享閱讀的步驟和要點(diǎn),帶領(lǐng)大家體驗(yàn)一次奇妙的閱讀之旅。
下面的內(nèi)容分為三個(gè)部分:
明確目標(biāo)
把握脈絡(luò)
深入細(xì)節(jié)
明確目標(biāo)
我們的最終目標(biāo)是通過底層適配的方法,移植ardupilot到自己的硬件平臺。不清楚底層適配的同學(xué),請看Ardupilot移植經(jīng)驗(yàn)分享(1)的“移植Ardupilot的方法有兩種”部分。而閱讀源碼的目標(biāo),也就非常簡單,即要搞清楚如何進(jìn)行適配:
要適配哪些接口(或者說函數(shù))?
實(shí)現(xiàn)這些接口時(shí),可參考哪些代碼?
會不會有難以實(shí)現(xiàn)的接口?
明確了這幾個(gè)問題,可以幫我們縮小閱讀的范圍。我們并不需要真去閱讀那700k行代碼,而是圍繞移植,這個(gè)中心目標(biāo),有目的有范圍地進(jìn)行閱讀。
前篇文章介紹ardupilot時(shí),提到代碼分為5個(gè)部分,筆者帶領(lǐng)大家回憶下最重要的3個(gè):
載具代碼:業(yè)務(wù)層的代碼,比如飛行器初始化,飛行模式控制。
共享庫:libraries中除以AP_HAL開頭的所有子目錄。包含傳感器驅(qū)動,姿態(tài)位置估算與控制。
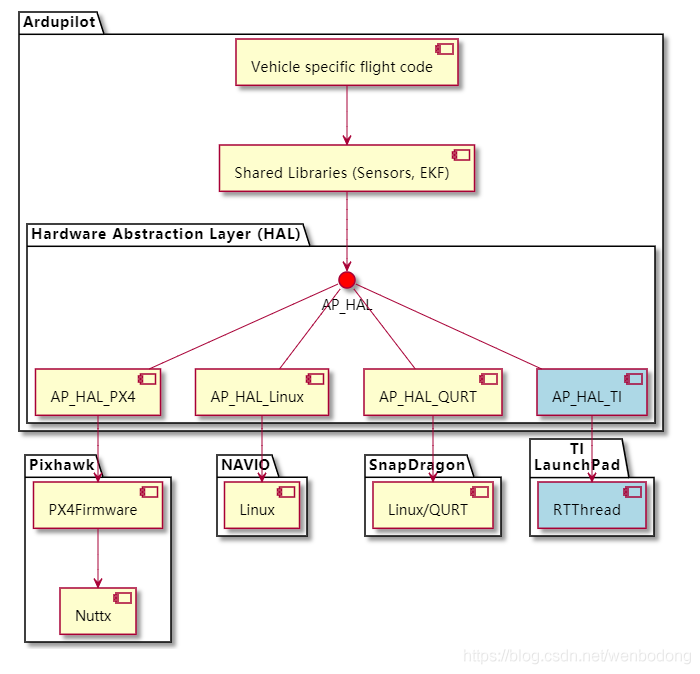
硬件抽象層(HAL):libraries中以AP_HAL開頭子目錄,如AP_HAL, AP_HAL_PX4, AP_HAL_Linux。
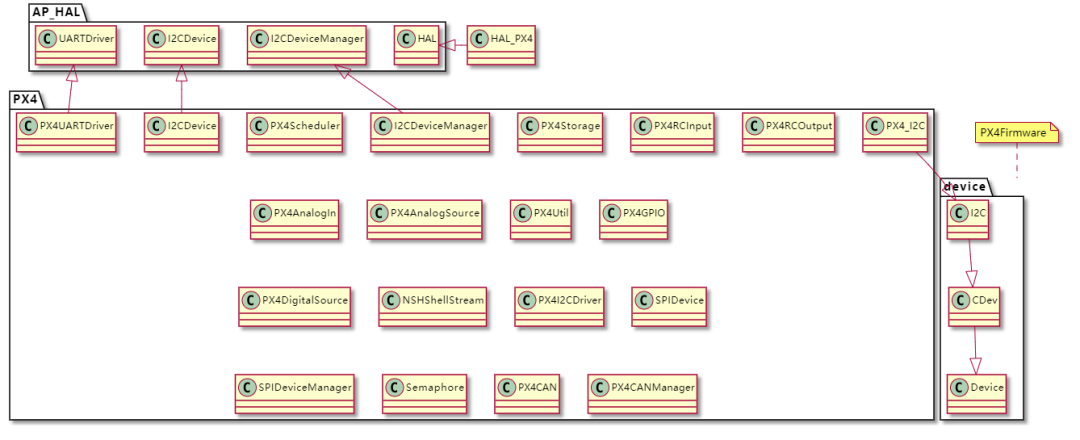
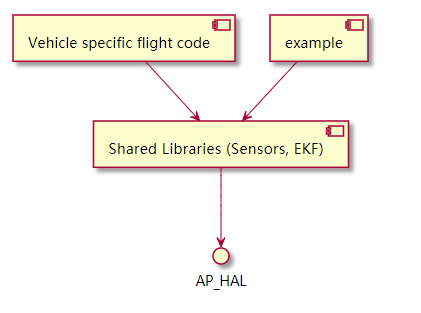
明白了這三塊之間的相互關(guān)系,上述問題就迎刃而解。一圖以蔽之:
UML圖示說明
本文多處使用UML圖來展示ardupilot的框架和流程,有些遵循標(biāo)準(zhǔn)語法,有些則是筆者自己習(xí)慣。無論如何,為方便大家理解,筆者會在第一次出現(xiàn)該種圖示時(shí)做必要說明。
上述是UML組件圖,非標(biāo)準(zhǔn)語法。
實(shí)線箭頭表示使用,比如Vehicle specific flight code使用Shared Libraries。
實(shí)線表示關(guān)聯(lián)。AP_HAL_PX4實(shí)現(xiàn)了AP_HAL接口,準(zhǔn)確說是繼承的關(guān)系。不過筆者在UML類圖中才見過繼承的語法,所以這里僅使用實(shí)線。
我們要實(shí)現(xiàn)的是AP_HAL接口,是上圖中的紅色圓圈。現(xiàn)有的實(shí)現(xiàn)有AP_HAL_PX4(對應(yīng)Pixhawk平臺),AP_HAL_Linux(對應(yīng)NAVIO)。我們要添加一個(gè)平臺,為圖中藍(lán)色部分,即AP_HAL_TI。
閱讀的重點(diǎn)也就確定了:
搞清楚AP_HAL的每一個(gè)接口,位于libraries/AP_HAL。
參考AP_HAL_PX4的實(shí)現(xiàn),位于libraires/AP_HAL_PX4。
不過若想完成移植大業(yè),僅閱讀這兩塊內(nèi)容是不夠的。
AP_HAL接口被飛控業(yè)務(wù)代碼以及共享庫調(diào)用,有些接口確切的功能必須結(jié)合具體的使用場景才能搞清楚。并且,想讓飛行器飛起來,還是要跑業(yè)務(wù)代碼。在這過程中遇到異常時(shí),若完全不了解業(yè)務(wù)代碼,那將很難定位問題。
AP_HAL_PX4依賴于底層平臺(PX4Firmware)所提供的功能。當(dāng)你想?yún)⒖糀P_HAL_PX4是如何實(shí)現(xiàn)某個(gè)接口的時(shí)候,你可能會發(fā)現(xiàn)它只是簡單地把任務(wù)交給了PX4Firmware。當(dāng)然,這只是少數(shù)情況。參考大部分的實(shí)現(xiàn)時(shí),看AP_HAL_PX4本身的代碼就足夠了。
因此,除了重點(diǎn)閱讀AP_HAL和AP_HAL_PX4外,我們需要適當(dāng)?shù)南蛏虾拖蛳卵由臁S绕涫窍蛏希莆诊w控業(yè)務(wù)代碼的整體框架,在需要深入某個(gè)細(xì)節(jié)時(shí),至少要知道去哪兒看。
把握脈絡(luò)
在深入了解HAL的每一個(gè)接口之前,我們需要先了解程序的整體框架。
main函數(shù)在哪兒?
了解整體框架的第一步,莫過于找到程序入口。
主函數(shù)的定義位于ArduCopter/ArduCopter.cpp的結(jié)尾處。
AP_HAL_MAIN_CALLBACKS(&copter);
AP_HAL_MAIN_CALLBACKS用于定義主函數(shù)。
#define AP_HAL_MAIN_CALLBACKS(CALLBACKS) extern “C” {
int AP_MAIN(int argc, char* const argv[]);
int AP_MAIN(int argc, char* const argv[]) {
hal.run(argc, argv, CALLBACKS);
return 0;
}
}
主函數(shù)的名稱不一定是大家熟悉的main,對于pixhawk平臺來說,其是Ardupilot_main。
#if CONFIG_HAL_BOARD == HAL_BOARD_PX4 || CONFIG_HAL_BOARD == HAL_BOARD_VRBRAIN
#define AP_MAIN __EXPORT ArduPilot_main
#endif
經(jīng)過預(yù)編譯后,其最終的形態(tài)如下,這就是ardupilot的主函數(shù)。
extern “C”
{
int __attribute__ ((visibility (“default”))) ArduPilot_main(int argc, char* const argv[]);
int __attribute__ ((visibility (“default”))) ArduPilot_main(int argc, char* const argv[])
{
hal.run(argc, argv, &copter);
return 0;
}
}
也許你會疑惑,為什么要如此大費(fèi)周章地定義主函數(shù)呢?
首先,主函數(shù)的名稱依平臺而定,這肯定是要用宏的。
其次,ardupilot項(xiàng)目不僅僅是ArduCopter,它還有APMrover2,AntennaTracker,ArduPlane和ArduSub,即ardupilot工程有多個(gè)入口函數(shù),在編譯時(shí)根據(jù)目標(biāo)類型來選擇。使用AP_HAL_MAIN_CALLBACKS來定義,可避免重復(fù)代碼,并且后續(xù)修改時(shí)只需要修改AP_HAL_MAIN_CALLBACKS宏即可。
放一起看下效果:
ArduCopter/ArduCopter.cpp
AP_HAL_MAIN_CALLBACKS(&copter);
ArduSub/ArduSub.cpp
AP_HAL_MAIN_CALLBACKS(&sub);
如果你想知道筆者是如何找到這個(gè)入口的,請看尋找ardupilot的main函數(shù)。
HAL引用
ArduPilot_main中只有一行關(guān)鍵代碼:
hal.run(argc, argv, &copter);
hal是HAL實(shí)例的引用,這個(gè)引用定義在Copter.cpp中。
const AP_HAL::HAL& hal = AP_HAL::get_HAL();
get_HAL()函數(shù)為業(yè)務(wù)層提供獲取HAL實(shí)例的接口,其在AP_HAL_Namespace.h中聲明,由HAL_PX4實(shí)現(xiàn)。
libraries/AP_HAL/AP_HAL_Namespace.h
// Must be implemented by the concrete HALs.
const HAL& get_HAL();
libraires/AP_HAL_PX4/HAL_PX4_Class.cpp中實(shí)現(xiàn)了get_HAL函數(shù),其創(chuàng)建并返回HAL實(shí)例。
const AP_HAL::HAL& AP_HAL::get_HAL() {
static const HAL_PX4 hal_px4;
return hal_px4;
}
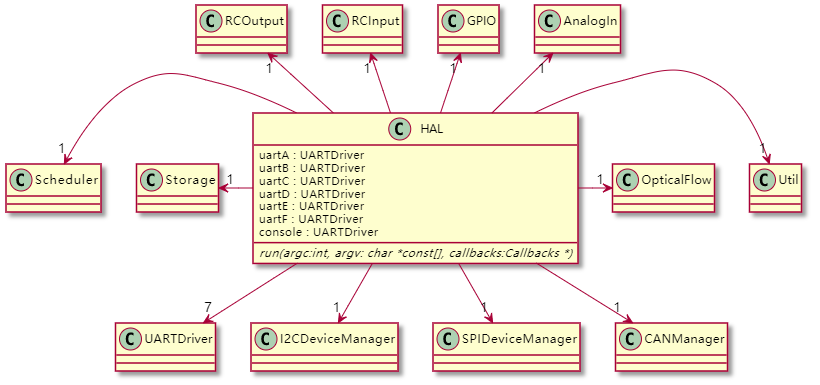
HAL類是硬件抽象層(HAL)的一個(gè)集合類,它包含了對硬件抽象層其他類的實(shí)例的引用。HAL類、get_HAL()以及HAL類引用的其他類,聲明在AP_HAL命名空間中。具體可查看AP_HAL_Namespace.h,這里就不貼代碼了,給張類圖:
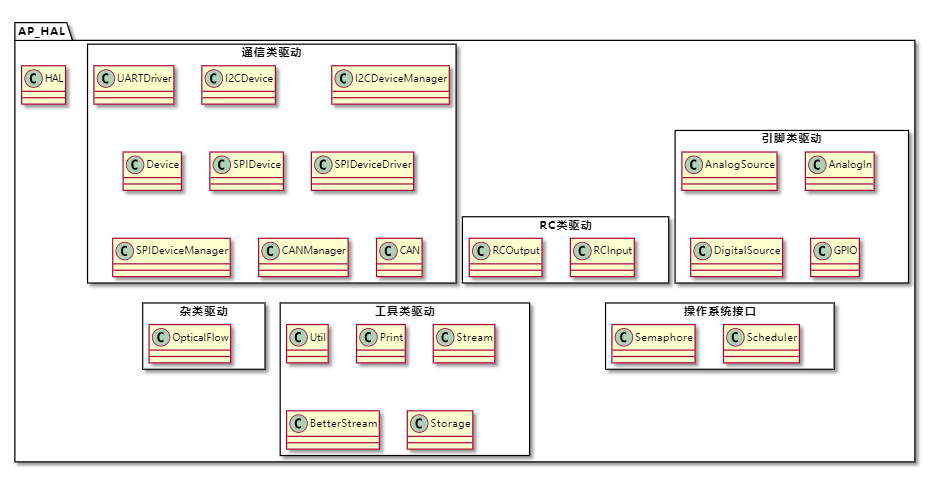
HAL類定義在HAL.h中,它用于管理其他各種類的實(shí)例,從而為業(yè)務(wù)層提供便捷的訪問。
UML圖示說明
上圖為UML類圖。每一個(gè)帶C標(biāo)記的方框表示一個(gè)類。方框中可添加成員變量和函數(shù)的說明。
成員變量的格式為:name:type
成員函數(shù)的格式為:name (parameter-list) : return-type,每一個(gè)形參的格式為:name:type
除了在方框中定義成員變量,還可以使用箭頭指向類的方式來表示。所以,上圖展示出HAL類中有著各種驅(qū)動類的實(shí)例。
業(yè)務(wù)層在獲得了hal后,就可以通過它訪問具體的驅(qū)動接口,比如說:
使用hal.console-》printf()打印日志
使用AP_HAL::millis()和AP_HAL::micros() 獲取上電啟動到現(xiàn)在所經(jīng)過的時(shí)間
使用hal.scheduler-》delay() 和 hal.scheduler-》delay_microseconds() 睡眠一定的時(shí)間
使用hal.gpio-》pinMode(), hal.gpio-》read() 和 hal.gpio-》write() 訪問GPIO引腳
通過hal.i2c_mgr訪問I2C設(shè)備
通過hal.spi訪問SPI設(shè)備
AP_HAL_PX4框架
libraries/AP_HAL之中定義的是HAL接口,順帶著介紹下其實(shí)現(xiàn)。
PX4的實(shí)現(xiàn)位于libraries/AP_HAL_PX4之中,其結(jié)構(gòu)為:
定義了PX4命名空間,基本上所有驅(qū)動類位于其中。
每一個(gè)AP_HAL空間中的驅(qū)動類,都在PX4空間中能找到實(shí)現(xiàn)。比如PX4UARTDriver繼承自UARTDriver,實(shí)現(xiàn)了其定義的全部接口。
HAL_PX4類繼承自HAL類。
PX4中的驅(qū)動類依賴于PX4Firmware中間件以實(shí)現(xiàn)具體的驅(qū)動功能,比如PX4_I2C繼承自PX4Firmware中的I2C類。
下圖描述了AP_HAL空間,PX4空間以及PX4Firmware的關(guān)系。只繪制了少部分AP_HAL中的類以做示意。若全放出來的話,那這圖就沒法兒看了。
HAL_PX4的初始化詳見其構(gòu)造函數(shù),在HAL_PX4_Class.cpp之中
HAL_PX4::HAL_PX4() :
AP_HAL::HAL(
&uartADriver, /* uartA */
&uartBDriver, /* uartB */
&uartCDriver, /* uartC */
&uartDDriver, /* uartD */
&uartEDriver, /* uartE */
&uartFDriver, /* uartF */
&i2c_mgr_instance,
&spi_mgr_instance,
&analogIn, /* analogin */
&storageDriver, /* storage */
&uartADriver, /* console */
&gpioDriver, /* gpio */
&rcinDriver, /* rcinput */
&rcoutDriver, /* rcoutput */
&schedulerInstance, /* scheduler */
&utilInstance, /* util */
nullptr, /* no onboard optical flow */
nullptr) /* CAN */
{}
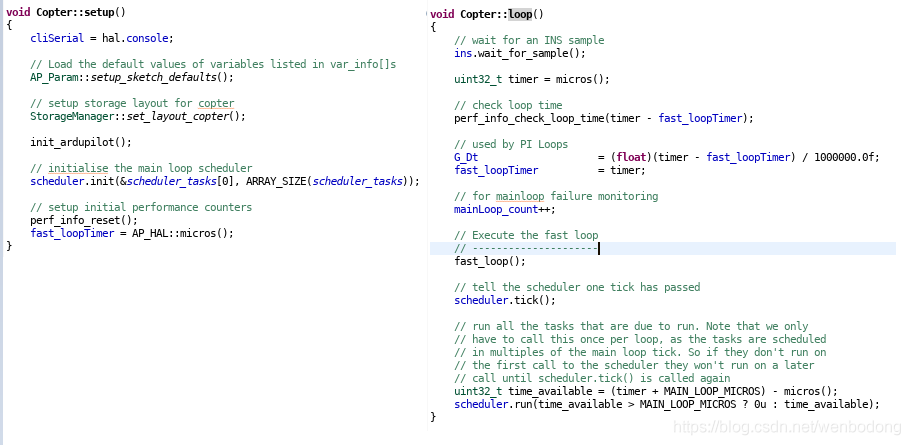
setup()和loop()
ArduCopter的主要工作,在setup()和loop()中執(zhí)行。setup()進(jìn)行初始化,而loop()如其名稱一樣,將被底層循環(huán)調(diào)用,以主持飛行工作的大局。
搞清聯(lián)系
至目前為止,我們了解了程序框架的4要素,它們是:
程序入口:AP_HAL_MAIN_CALLBACKS(&copter)
隨處可用的hal引用:const AP_HAL::HAL& hal = AP_HAL::get_HAL();
setup()
loop()
我們知道setup()會被底層調(diào)用一次,還知道loop()會被底層循環(huán)調(diào)用。不過它們是在哪兒被調(diào)用的呢?這與AP_HAL_MAIN_CALLBACKS定義出的入口函數(shù)有什么關(guān)聯(lián)嗎?如果不搞清楚這些問題,筆者覺得并不算是掌握了脈絡(luò)。好的,現(xiàn)在筆者來深入剖析它們的關(guān)系。
setup,loop和底層的關(guān)系是這樣的:
Callbacks接口定義了兩個(gè)純虛函數(shù)setup和loop。
ArduCopter.cpp中定義了Copter類,繼承Callbacks接口,所以Copter的實(shí)例就是Callbacks對象。
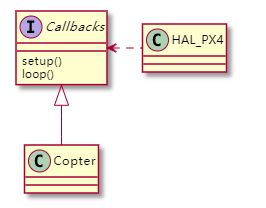
ArduCopter.cpp將創(chuàng)建出的Callbacks對象傳遞給HAL_PX4,以供其調(diào)用。就是ArduPilot_main中的那行代碼:
hal.run(argc, argv, &copter);
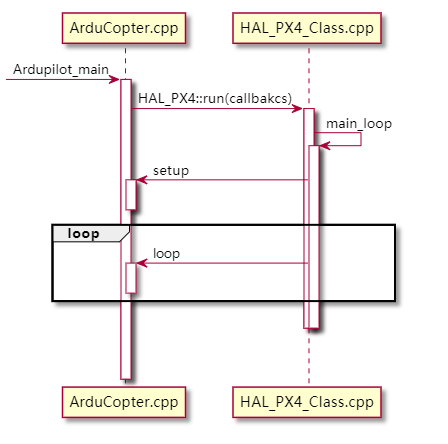
具體的調(diào)用流程是這樣的:
AHRS_Test.cpp通過宏AP_HAL_MAIN定義出了Ardupilot_main()。
上電啟動后,硬件平臺調(diào)用Ardupilot_main()。
Ardupilot_main()調(diào)用HAL層的入口函數(shù)HAL_PX4::run(),并將自己的Callbacks對象傳遞給它。
HAL_PX4::run()調(diào)用了自己的main_loop()。
main_loop先調(diào)用AHRS_Test.cpp的setup()進(jìn)行業(yè)務(wù)初始化。
main_loop循環(huán)調(diào)用AHRS_Test.cpp的loop(),直到斷電。
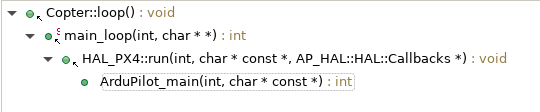
一圖以蔽之
也可以用eclipse的查看調(diào)用棧功能來展示:
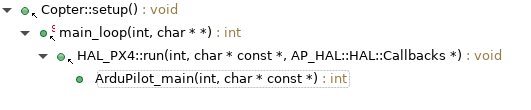
看完上述內(nèi)容,是不是感覺有點(diǎn)復(fù)雜呢。筆者來總結(jié)一下:
首先,記住兩點(diǎn)最關(guān)鍵的:
ArduCopter代碼定義setup()和loop(),setup()進(jìn)行初始化,而運(yùn)行時(shí)的主要工作是在loop()之中。
HAL_PX4_Class負(fù)責(zé)程序調(diào)度,即調(diào)用setup()和loop()。
不過呢,有點(diǎn)繞的是:HAL_PX4_Class并不提供程序入口,程序入口由ArduCopter提供,它們會定義Ardupilot_main()。由Ardupilot_main()啟動HAL_PX4_Class。
為什么不由HAL_PX4_Class來定義程序入口?再想想?因?yàn)槌绦蛴泻芏嗫蛇x入口嘛。還記得APMrover2,AntennaTracker,ArduPlane和ArduSub嗎。
深入淺出
我們了解了程序框架的4要素,并且深入研究了它們之間的調(diào)度邏輯,是時(shí)候“淺出”一下了。我們來看一個(gè)ardupilot里面的example。
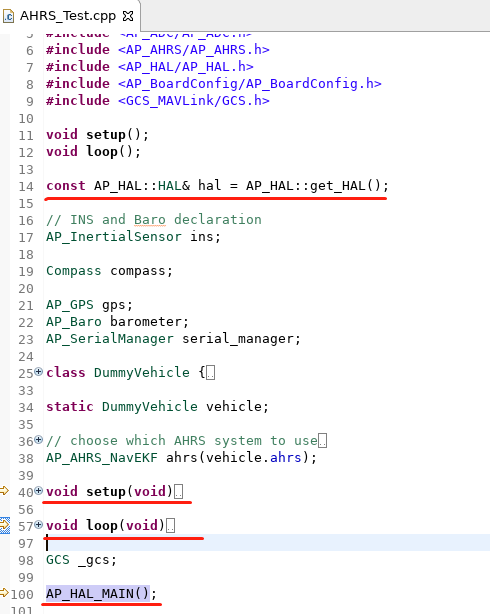
為一覽全貌,筆者折疊了很多代碼塊。大家發(fā)現(xiàn)什么了沒?程序4要素都在其中。example是獨(dú)立于業(yè)務(wù)代碼之外,可單獨(dú)運(yùn)行的代碼。其與業(yè)務(wù)代碼處在相同的層次上,它們都依賴于共享庫和HAL。
AHRS_Test.cpp是姿態(tài)解算的示例。ardupilot工程中有各種示例代碼,有AP_HAL驅(qū)動的example,也有各種共享庫的example,有兩個(gè)作用:
演示功能模塊的用法。
對功能模塊進(jìn)行測試。當(dāng)我們實(shí)現(xiàn)了新平臺的HAL接口時(shí),使用example來驗(yàn)證,遠(yuǎn)比直接跑業(yè)務(wù)代碼要方便有效。
在工程根目錄下查找所有示例:
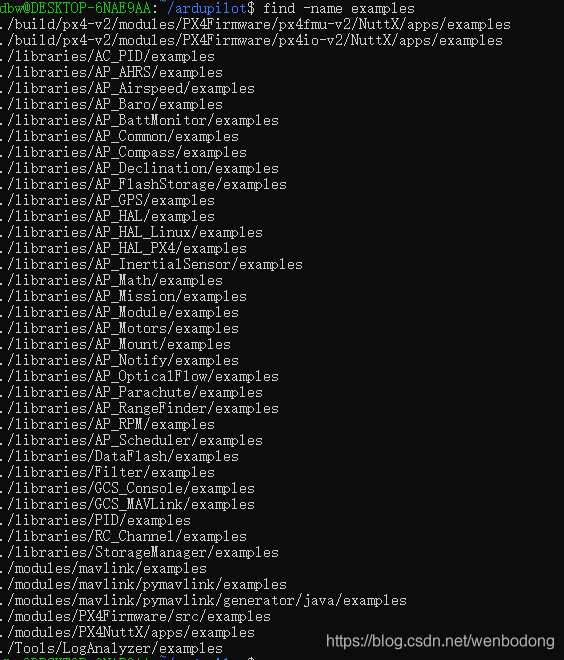
怎么用這個(gè)示例呢,使用如下命令編譯固件并上傳:
。/waf build --target examples/AHRS_Test --upload
ardupilot是單線程的嗎?
看了由setup()和loop()組成的框架,你可能會認(rèn)為ardupilot是單線程的。早期的ardupilot跑在ardunio上,setup()和loop()就是歷史的痕跡。那時(shí)的ardupilot確實(shí)是loop外加一個(gè)定時(shí)器回調(diào),算是2個(gè)線程。
從pixhawk開始,這一切就不同了。pixhawk平臺的底層系統(tǒng)是Nuttx實(shí)時(shí)操作系統(tǒng),其支持帶優(yōu)先級的多線程功能,而AP_HAL_PX4充分利用了這一特性。請看筆者嘔心瀝血繪制的高清大圖(請?jiān)谛?a target="_blank">標(biāo)簽頁中打開圖片):
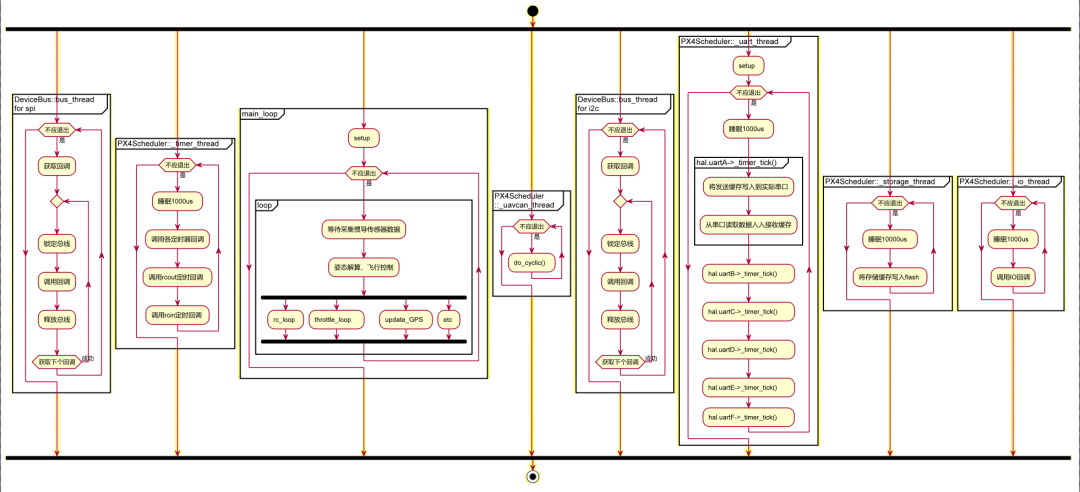
上圖展示了各個(gè)線程的大體框架,左邊線程的優(yōu)先級大于右邊的。除了main_loop和timer_thread,還有許多其他的線程。最多的是總線通信線程,有SPI, I2C, CAN, Uart。也可通過下表進(jìn)行了解,優(yōu)先級的數(shù)值越大代表優(yōu)先級越高。
名稱優(yōu)先級定時(shí)間隔函數(shù)名說明
bus242
DeviceBus::bus_thread用于SPI
timer1811msPX4Scheduler::_timer_thread
main1802.5msmain_loop主線程
uavcan1791msPX4Scheduler::_uavcan_thread
bus178
DeviceBus::bus_thread用于I2C
uart601msPX4Scheduler::_uart_thread
storage5910msPX4Scheduler::_storage_thread
io581msPX4Scheduler::_io_thread
main_loop里面的并行實(shí)際上是一個(gè)偽并行,由ardupilot自己設(shè)計(jì)的AP_Scheduler系統(tǒng)來進(jìn)行調(diào)度。這里就不展開了,后續(xù)有機(jī)會的話會單獨(dú)介紹。
深入細(xì)節(jié)
不知不覺寫了好多,下一篇再講具體的HAL接口。對了,講解移植流程,就得等Ardupilot移植經(jīng)驗(yàn)分享(4)了。
原文標(biāo)題:Ardupilot移植經(jīng)驗(yàn)分享(2)
文章出處:【微信公眾號:RTThread物聯(lián)網(wǎng)操作系統(tǒng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
責(zé)任編輯:haq
-
代碼
+關(guān)注
關(guān)注
30文章
4968瀏覽量
73988
原文標(biāo)題:Ardupilot移植經(jīng)驗(yàn)分享(2)
文章出處:【微信號:RTThread,微信公眾號:RTThread物聯(lián)網(wǎng)操作系統(tǒng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
HPM知識庫 | HPMicro Ardupilot支持包v0.1.0發(fā)布!

GPS時(shí)鐘授時(shí)裝置常見問題與實(shí)戰(zhàn)經(jīng)驗(yàn)分享

GPS北斗衛(wèi)星校時(shí)器:真實(shí)使用經(jīng)驗(yàn)與避坑指南

求助STM32H563關(guān)于LWESP配置UART問題
開源鴻蒙MNN AI應(yīng)用開發(fā)與MNN移植經(jīng)驗(yàn)
恩智浦MCU教程 基于MCUXpresso和FRDM-MCXA346的RT-Thread Nano移植

機(jī)智云配網(wǎng)教程第三期:單片機(jī)代碼移植實(shí)戰(zhàn)

求助,關(guān)于K230 linux SENSOR 移植讀取CIF的RAW數(shù)據(jù)的疑問?
STM32與機(jī)智云連接實(shí)現(xiàn)步驟與技巧(下篇):機(jī)智云代碼移植與優(yōu)化
簡述電源設(shè)計(jì)經(jīng)驗(yàn)技巧
STM32G431移植FreeModbus
工業(yè)控制PCBA抗震設(shè)計(jì)要點(diǎn):經(jīng)驗(yàn)分享與技術(shù)探討
從DeepSeek到Qwen,AI大模型的移植與交互實(shí)戰(zhàn)指南-飛凌嵌入式

GaN E-HEMTs的PCB布局經(jīng)驗(yàn)總結(jié)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論