") 詳解基于FPGA的圖像旋轉(zhuǎn)系統(tǒng)的運(yùn)用
詳解基于FPGA的圖像旋轉(zhuǎn)系統(tǒng)的運(yùn)用

一、圖像旋轉(zhuǎn)原理
圖像旋轉(zhuǎn)是指圖像按照某個(gè)位置轉(zhuǎn)動(dòng)一定角度的過(guò)程,旋轉(zhuǎn)中圖像仍保持這原始尺寸。圖像旋轉(zhuǎn)后圖像的水平對(duì)稱軸、垂直對(duì)稱軸及中心坐標(biāo)原點(diǎn)都可能會(huì)發(fā)生變換,因此需要對(duì)圖像旋轉(zhuǎn)中的坐標(biāo)進(jìn)行相應(yīng)轉(zhuǎn)換。
如圖,原圖像經(jīng)過(guò)順時(shí)針旋轉(zhuǎn)角度為 θ 后,源圖像的坐標(biāo)為 P0 ( Xo, Yo ) 的點(diǎn)移動(dòng)到了 P1(X1, Y1)。
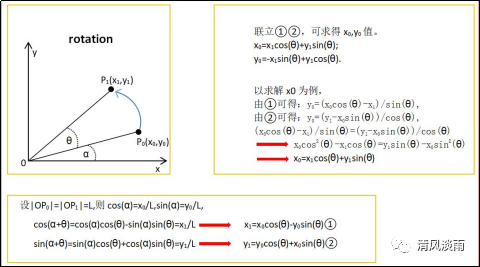
經(jīng)過(guò)推導(dǎo),可以得到上述的 P0 和P1 的坐標(biāo)變換關(guān)系式。
方案一、【正向預(yù)設(shè)】從原圖映射到目標(biāo)圖像在此方案中,實(shí)現(xiàn)代碼的方式是正向的思路,將原圖中的像素點(diǎn)的坐標(biāo)進(jìn)行坐標(biāo)的旋轉(zhuǎn),然后直接幅值到輸出的圖像中,此方案旨在找到輸入坐標(biāo)與輸出坐標(biāo)之間的代數(shù)對(duì)應(yīng)關(guān)系。
在該方法中,首先將原始坐標(biāo)以及目標(biāo)坐標(biāo)放入了極坐標(biāo)中,并且通過(guò)在極坐標(biāo)中的關(guān)系,找到了同時(shí)滿足X0,Y0,X1,Y1四個(gè)參量的方程組,以此來(lái)解出對(duì)應(yīng)的坐標(biāo)關(guān)系,并以此為基礎(chǔ)得到了輸入與輸出之間的矩陣運(yùn)算關(guān)系如下:

Matlab代碼實(shí)現(xiàn)如下:
clear allclc
% 讀入圖片im = imread(‘1.jpg’);figure;imshow(im);
% 求出旋轉(zhuǎn)矩陣a = 40 / 180 * pi;R = [cos(a), -sin(a); sin(a), cos(a)];
% 求出圖片大小 ch為通道數(shù) h為高度 w為寬度sz = size(im);h = sz(1);w = sz(2);ch = sz(3);c = [h; w] / 2;
% 初始化結(jié)果圖像im2 = uint8(zeros(h, w, 3));
for k = 1:ch for i = 1:h for j = 1:w p = [i; j]; % round為四舍五入 pp = round(R*(p-c)+c); if (pp(1) 》= 1 && pp(1) 《= h && pp(2) 》= 1 && pp(2) 《= w) im2(pp(1), pp(2), k) = im(i, j, k); end end endend
% 顯示圖像figure;imshow(im2);
但在實(shí)際的測(cè)試中發(fā)現(xiàn),這種方法所旋轉(zhuǎn)得到的圖像有著較為嚴(yán)重的失真現(xiàn)象,具體情況如下圖所示:
原圖
旋轉(zhuǎn)后的圖像
很明顯可以看到,在旋轉(zhuǎn)之后這兩張圖片出現(xiàn)了較大的差別,首先是原圖像被裁減了,其次是目標(biāo)圖像中有較多的瑕點(diǎn)(雜點(diǎn))。究其原因在于,從原圖旋轉(zhuǎn)后得到的目標(biāo)圖像的像素位置在原圖中找不到。另外就是邊緣被裁剪的問(wèn)題,由于在這個(gè)方案中約束了顯示區(qū)域,因此在旋轉(zhuǎn)的過(guò)程中,部分像素點(diǎn)就會(huì)由于超出邊界而被裁剪。針對(duì)以上的兩個(gè)問(wèn)題,進(jìn)行了如下改進(jìn)。
方案二、【逆向預(yù)設(shè)】從目標(biāo)圖像映射到原圖
由于在之前的方案中出現(xiàn)了雜點(diǎn)以及圖像邊緣裁剪的問(wèn)題,因此在本方案中,我們采用了逆向思維,用目標(biāo)圖像的坐標(biāo)去與原圖的坐標(biāo)進(jìn)行坐標(biāo)匹配,若在原圖像中能找到匹配的圖像,就顯示該點(diǎn)旋轉(zhuǎn)后的點(diǎn)坐標(biāo),若在原圖中找不到該點(diǎn),則不顯示該點(diǎn),通過(guò)這樣就解決了雜點(diǎn)的問(wèn)題。 其中,pp為旋轉(zhuǎn)在后的坐標(biāo)對(duì)應(yīng)矩陣,在if語(yǔ)句中限定了原圖的區(qū)域,用此區(qū)域則可以到原圖中的坐標(biāo)點(diǎn),以此來(lái)排除不在區(qū)域中的坐標(biāo)點(diǎn),這樣就可以解決雜點(diǎn)的問(wèn)題。
在這種方案下,坐標(biāo)的對(duì)應(yīng)關(guān)系如下:

MATLAB仿真代碼如下:
clear allclc
% 讀入圖片im = imread(‘1.jpg’);figure;imshow(im);
% 求出旋轉(zhuǎn)矩陣a = 20 / 180 * pi;R = [cos(a), sin(a); -sin(a), cos(a)];
% 求出圖片大小 ch為通道數(shù) h為高度 w為寬度
sz = size(im);h = sz(1);w = sz(2);ch = sz(3);c = [w;h] /2;
% 初始化結(jié)果圖像im2 = uint8(zeros(h, w, 3));for k = 1:ch %遍歷輸出圖像所有位置的像素 for i = 1:h for j = 1:w p = [j; i]; % p :輸出圖像的像素坐標(biāo) % round為四舍五入 pp = round(R*(p-c)+c); %pp :對(duì)應(yīng)到輸入圖像的像素坐標(biāo) %逆向進(jìn)行像素的查找 if (pp(1) 》= 1 && pp(1) 《= w && pp(2) 》= 1 && pp(2) 《= h) im2(i, j, k) = im(pp(2), pp(1), k); end end endend
% 顯示圖像figure;imshow(im2);
這樣,該旋轉(zhuǎn)后的圖像就有了較好的還原度,達(dá)到了相應(yīng)的題目要求,具體的方案的效果如下圖所示:
原圖
旋轉(zhuǎn)后的圖像
如圖所示,相對(duì)方案一而言,圖像的效果就好了很多,但圖像邊緣仍然存在邊緣被切割的現(xiàn)象。 方案三:考慮到未對(duì)旋轉(zhuǎn)后的圖像進(jìn)行顯示區(qū)域的劃分,因此此類旋轉(zhuǎn)只是對(duì)單一像素點(diǎn)的旋轉(zhuǎn),然后在原圖像的顯示區(qū)域上進(jìn)行坐標(biāo)點(diǎn)的重新組合,得到顯示的圖像。在解決的方法的思路上,采用目標(biāo)顯示區(qū)域的重新劃分來(lái)解決該問(wèn)題。
具體思路是,采用原圖像的長(zhǎng)寬作為基準(zhǔn),再用坐標(biāo)轉(zhuǎn)換的關(guān)系,將長(zhǎng)和寬轉(zhuǎn)換到旋轉(zhuǎn)后的坐標(biāo)系中,得到目標(biāo)圖像在旋轉(zhuǎn)后坐標(biāo)系中的顯示區(qū)域,代碼具體如下:
% 讀入圖片im = imread(‘1.jpg’);
figure;imshow(im);
% 求出旋轉(zhuǎn)矩陣a = 30 / 180 * pi;R = [cos(a), -sin(a); sin(a), cos(a)];R = R‘; % 求出旋轉(zhuǎn)矩陣的逆矩陣進(jìn)行逆向查找
% 計(jì)算原圖大小sz = size(im);h = sz(1);w = sz(2);ch = sz(3);c1 = [h; w] / 2;
% 計(jì)算顯示完整圖像需要的畫布大小hh = floor(w*sin(a)+h*cos(a))+1;ww = floor(w*cos(a)+h*sin(a))+1;c2 = [hh; ww] / 2;
% 初始化目標(biāo)畫布im2 = uint8(ones(hh, ww, 3)*128);for k = 1:ch for i = 1:hh for j = 1:ww p = [i; j]; pp = (R*(p-c2)+c1); mn = floor(pp); ab = pp - mn; a = ab(1); b = ab(2); m = mn(1); n = mn(2); % 線性插值方法 if (pp(1) 》= 2 && pp(1) 《= h-1 && pp(2) 》= 2 && pp(2) 《= w-1) im2(i, j, k) = (1-a)*(1-b)*im(m, n, k) + a*(1-b)*im(m+1, n, k)。.. + (1-a)*b*im(m, n, k) + a*b*im(m, n, k); end end endend
% 顯示圖像figure;imshow(im2);
這樣,就解決了圖像邊緣被裁剪的問(wèn)題,是整個(gè)圖像得以完整的顯示,實(shí)際的效果如下:
原圖
旋轉(zhuǎn)后的圖像
從圖示的效果可以看出,邊緣區(qū)域被裁剪的問(wèn)題被解決了,但問(wèn)題是圖片加陰影的區(qū)域面積比原圖大很多。 綜合以上三種方案,結(jié)合實(shí)際需求,由于我們的顯示是在一塊固定大小的屏幕上進(jìn)行顯示,整個(gè)圖像的顯示范圍有限,采用CORDIC算法進(jìn)行坐標(biāo)變換產(chǎn)生的延時(shí)太大。最終基于處理速度和資源占用的均衡考慮,最終選擇方案二作為我們圖像旋轉(zhuǎn)的設(shè)計(jì)方案。
三、旋轉(zhuǎn)坐標(biāo)計(jì)算
在該設(shè)計(jì)中,要求圖像擁有0到360的任意角度的旋轉(zhuǎn),坐標(biāo)變換需要角度的正弦和余弦值。 利用matlab生成正余弦表,并將其擴(kuò)大256倍,打印到文件中。利用得到的正余弦表數(shù)值,將其寫入verilog代碼中,生成正余弦查找表。通過(guò)輸入角度值來(lái)索引其正余弦數(shù)值。Matlab生成正余弦列表的代碼如下:
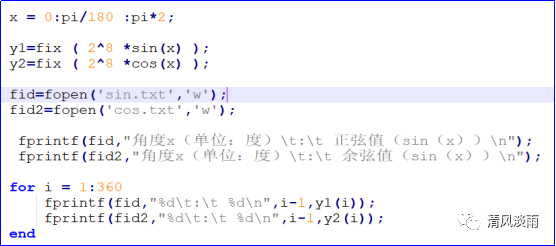
該正弦,余弦通過(guò)MATLAB計(jì)算得到,并預(yù)先儲(chǔ)存到FPGA的片上儲(chǔ)存空間中,在進(jìn)行坐標(biāo)變換時(shí),讀取對(duì)應(yīng)角度的正弦,余弦值,進(jìn)行坐標(biāo)變換。由于計(jì)算得到的正弦和余弦值為浮點(diǎn)數(shù),而FPGA擅長(zhǎng)于進(jìn)行整數(shù)運(yùn)算。故要進(jìn)行浮點(diǎn)數(shù)到整數(shù)的轉(zhuǎn)換,具體的實(shí)現(xiàn)方法是,將計(jì)算得到的浮點(diǎn)正弦,余弦值乘上 256 后再取整,計(jì)算得到的結(jié)果于原結(jié)果相比被擴(kuò)大了256倍,而在數(shù)字電路中,除法操作可以用移位來(lái)進(jìn)行。結(jié)果右移8位即等效于除于256 。 坐標(biāo)變換的核心代碼如下:

將坐標(biāo)變換計(jì)算模塊封裝為一個(gè)子模塊,輸入輸出圖像的坐標(biāo)和旋轉(zhuǎn)角度后,即可計(jì)算出對(duì)應(yīng)的輸入圖像對(duì)應(yīng)的像素的坐標(biāo)。然后讀取該坐標(biāo)的像素值,寫入到旋轉(zhuǎn)重建的圖像對(duì)應(yīng)的坐標(biāo)位置即可。
四、效果展示(Results show)
0、原圖 (正常顯示)
1、順時(shí)針旋轉(zhuǎn)22度
2、順時(shí)針旋轉(zhuǎn)90度
3、順時(shí)針旋轉(zhuǎn)270度
4、順時(shí)針旋轉(zhuǎn)341度
五、說(shuō)明
在公眾號(hào)對(duì)話框回復(fù) FPGA2019 ,即可獲得該項(xiàng)目的工程源代碼,詳細(xì)的文檔說(shuō)明,MATLAB仿真代碼。
編輯:lyn
-
FPGA
+關(guān)注
關(guān)注
1660文章
22411瀏覽量
636260 -
MATLAB仿真
+關(guān)注
關(guān)注
4文章
176瀏覽量
20932 -
圖像旋轉(zhuǎn)
+關(guān)注
關(guān)注
0文章
3瀏覽量
2298
原文標(biāo)題:基于FPGA的圖像旋轉(zhuǎn)系統(tǒng)設(shè)計(jì)
文章出處:【微信號(hào):HXSLH1010101010,微信公眾號(hào):FPGA技術(shù)江湖】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
如何以編程方式在觸摸屏 MIPI 顯示器上旋轉(zhuǎn)圖像?
JG024Z-DX系列 光電旋轉(zhuǎn)測(cè)徑儀 360度高精高速
圖像采集卡分類、接口與性能指標(biāo)詳解

隨鉆測(cè)量系統(tǒng)中旋轉(zhuǎn)閥脈沖器的設(shè)計(jì)與優(yōu)化
圖像采集卡:機(jī)器視覺(jué)時(shí)代的圖像數(shù)據(jù)核心樞紐
基于FPGA的CLAHE圖像增強(qiáng)算法設(shè)計(jì)
友思特方案 | FPGA 加持,友思特圖像采集卡高速預(yù)處理助力視覺(jué)系統(tǒng)運(yùn)行提速增效
基于米爾MYC-YM90X安路飛龍DR1開(kāi)發(fā)板儀表圖像識(shí)別系統(tǒng)開(kāi)發(fā)
FPGA 加持,友思特圖像采集卡高速預(yù)處理助力視覺(jué)系統(tǒng)運(yùn)行提速增效
基于FPGA的數(shù)字識(shí)別系統(tǒng)設(shè)計(jì)

itop-3588開(kāi)發(fā)板Android系統(tǒng)開(kāi)發(fā)筆記-旋轉(zhuǎn) Android系統(tǒng)
【FPGA新品】正點(diǎn)原子L22開(kāi)發(fā)板來(lái)了!采用紫光的Logos系列FPGA,適合工業(yè)控制、圖像處理、高速通信等領(lǐng)域!
技術(shù)分享|iTOP-RK3588開(kāi)發(fā)板Ubuntu20系統(tǒng)旋轉(zhuǎn)屏幕方案



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論