") 香港中文大學(xué)開發(fā)出“FreeBOT”球形機(jī)器人
香港中文大學(xué)開發(fā)出“FreeBOT”球形機(jī)器人

香港中文大學(xué)的研究團(tuán)隊(duì)開發(fā)了“FreeBOT”球形機(jī)器人,其大小比壘球略大,可以在平面上滾動(dòng)并在墻壁和斜坡上攀爬。機(jī)器人彼此粘在一起,也可以彼此分開,并共同創(chuàng)造各種形狀和動(dòng)作。
FreeBOT模塊是一個(gè)內(nèi)部裝有磁鐵的球形機(jī)器人,它由兩部分組成:磁鐵球形殼體和內(nèi)部驅(qū)動(dòng)機(jī)構(gòu)。內(nèi)部驅(qū)動(dòng)機(jī)構(gòu)有兩個(gè)輪子,并由兩個(gè)直流電動(dòng)機(jī)通過齒輪驅(qū)動(dòng)。內(nèi)輪在球殼中的位置通過電機(jī)控制,并且獨(dú)立在平面上滾動(dòng)。強(qiáng)大的內(nèi)部磁體允許在鐵磁壁上垂直移動(dòng)。
原型的內(nèi)部結(jié)構(gòu)
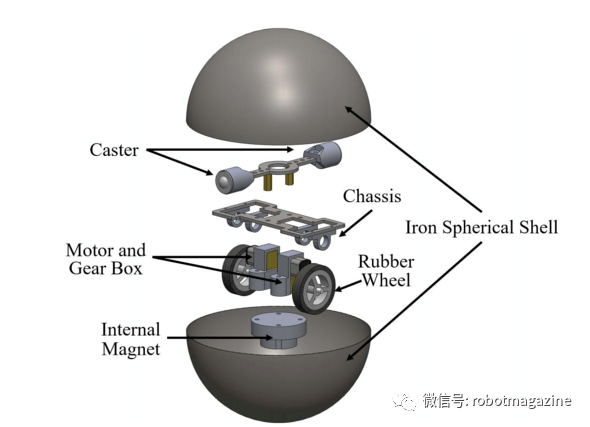
FreeBOT的分解圖
FreeBOT內(nèi)部磁鐵很小,但是會(huì)產(chǎn)生很強(qiáng)的外部磁場(chǎng)。它集成了其他模塊,以便被磁場(chǎng)吸引,甚至在集成后也沿模塊移動(dòng)。由于幾乎整個(gè)模塊都是接觸點(diǎn),集成機(jī)器人組可以各種形狀移動(dòng)。例如,兩個(gè)機(jī)器人可以一起工作以攀登非鐵磁紙板臺(tái)階,或攀登其他模塊(例如梯子)。
原文標(biāo)題:一組球形協(xié)作移動(dòng)的機(jī)器人“Free BOT”
文章出處:【微信公眾號(hào):機(jī)器人技術(shù)與應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
責(zé)任編輯:haq
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222267
原文標(biāo)題:一組球形協(xié)作移動(dòng)的機(jī)器人“Free BOT”
文章出處:【微信號(hào):robotmagazine,微信公眾號(hào):機(jī)器人技術(shù)與應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
英特爾攜手產(chǎn)學(xué)合作伙伴發(fā)布《具身智能機(jī)器人安全子系統(tǒng)白皮書》

高精度機(jī)器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運(yùn)動(dòng)控制方案
RK3576機(jī)器人核心:三屏異顯+八路攝像頭,重塑機(jī)器人交互與感知
小蘿卜機(jī)器人的故事
機(jī)器人看點(diǎn):寧德時(shí)代入股銀河通用機(jī)器人 機(jī)器人企業(yè)扎堆赴港上市
MATLAB 助力香港中文大學(xué)解決生物醫(yī)學(xué)圖像處理挑戰(zhàn)
工業(yè)機(jī)器人的特點(diǎn)
輪式移動(dòng)機(jī)器人電機(jī)驅(qū)動(dòng)系統(tǒng)的研究與開發(fā)
明遠(yuǎn)智睿SSD2351開發(fā)板:語音機(jī)器人領(lǐng)域的變革力量
盤點(diǎn)#機(jī)器人開發(fā)平臺(tái)
商湯科技與中國移動(dòng)香港、香港中文大學(xué)法律學(xué)院簽署合作備忘錄
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】視覺實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門的引路書
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】+內(nèi)容初識(shí)
面向大學(xué)的樹莓派 RemoteLab 機(jī)器人開發(fā)!




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論