") 一種機器人的仿真處理方法及裝置
一種機器人的仿真處理方法及裝置

近日,珠海格力電器股份有限公司公開多條機器人相關專利信息,專利名稱分別為“機器人的仿真處理方法及裝置”、“時鐘同步方法、機器人控制系統(tǒng)和機器人”、“關節(jié)臂結構、機器人”。
首先來看第一項專利“機器人的仿真處理方法及裝置”,2020年10月13日申請,2021年1月22日公開,公開號為CN112247989A。
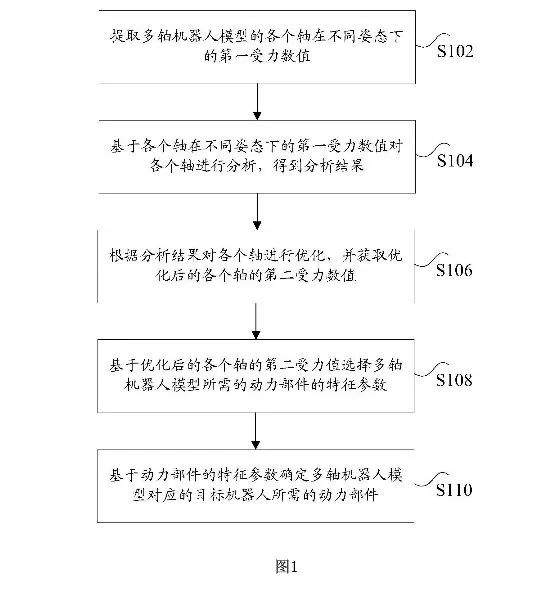
根據專利摘要,本發(fā)明公開了一種機器人的仿真處理方法及裝置。其中,該方法包括:提取多軸機器人模型的各個軸在不同姿態(tài)下的第一受力數值;基于各個軸在不同姿態(tài)下的第一受力數值對各個軸進行分析,得到分析結果;根據分析結果對各個軸進行優(yōu)化,并獲取優(yōu)化后的各個軸的第二受力數值;基于優(yōu)化后的各個軸的第二受力值選擇多軸機器人模型所需的動力部件的特征參數;基于動力部件的特征參數確定多軸機器人模型對應的目標機器人所需的動力部件。
本發(fā)明解決了相關技術中無法對多軸機器人的各個關節(jié)的關節(jié)載荷進行計算,導致的無法合理地對機器人的電機、減速機等部件進行選型的技術問題。
第二項專利“時鐘同步方法、機器人控制系統(tǒng)和機器人”,2020年9月21日申請,2021年1月22日公開,公開號為CN112247985A。
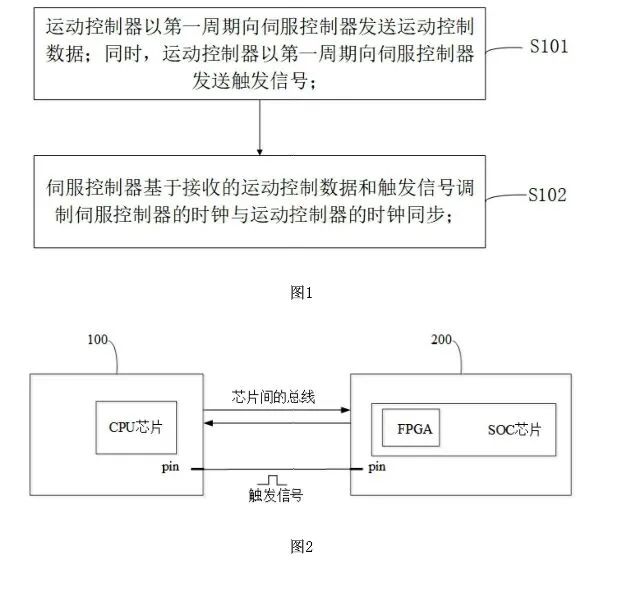
根據專利摘要,本發(fā)明涉及機器人控制技術領域,公開了一種時鐘同步方法、機器人控制系統(tǒng)和機器人。其中,時鐘同步方法應用于機器人控制系統(tǒng),包括:運動控制器以第一周期向伺服控制器發(fā)送運動控制數據;同時,運動控制器以第一周期向伺服控制器發(fā)送觸發(fā)信號;伺服控制器基于接收的運動控制數據和觸發(fā)信號調制伺服控制器的時鐘與運動控制器的時鐘同步。滿足了時鐘同步的實時性,從而極大地降低了機器人在高速運行過程中的速度波動或抖動,提升了機器人在高速下運行的軌跡精度,最終提高了控制器在高帶寬響應下的整體控制性能。
第三項專利“關節(jié)臂結構、機器人”,2020年9月10日申請,2021年1月22日公開,公開號為CN112248028A。
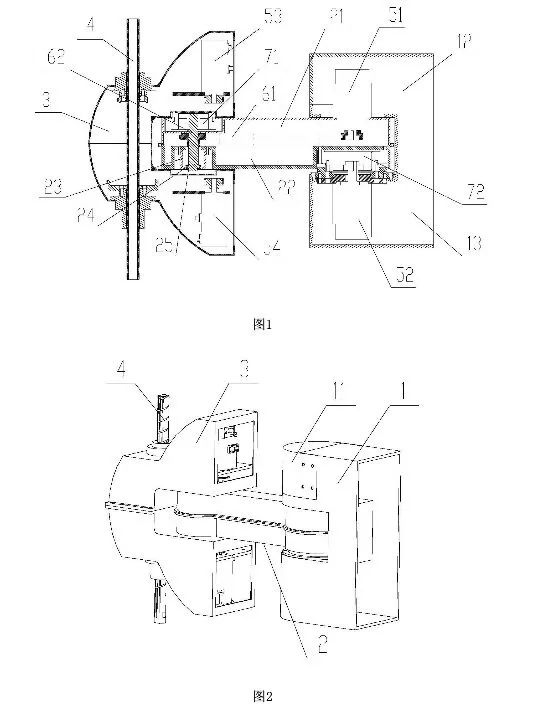
根據專利摘要,本申請?zhí)峁┮环N關節(jié)臂結構、機器人,包括第一關節(jié)臂、第二關節(jié)臂、第一電機和傳動部,所述第二關節(jié)臂能夠轉動地設置在所述第一關節(jié)臂上,所述第一電機設置在所述第二關節(jié)臂外,所述第一電機通過所述傳動部帶動所述第二關節(jié)臂在所述第一關節(jié)臂上轉動。
本申請?zhí)峁┮环N關節(jié)臂結構、機器人,能夠減少關節(jié)臂結構末端的慣量,提高關節(jié)臂結構的相應速度。
責任編輯:lq
-
控制系統(tǒng)
+關注
關注
41文章
6953瀏覽量
114088 -
機器人
+關注
關注
213文章
31076瀏覽量
222201 -
電機
+關注
關注
143文章
9590瀏覽量
154083
原文標題:格力公開3項機器人相關專利 涉及關節(jié)臂結構、時鐘同步方法等
文章出處:【微信號:tjrobot,微信公眾號:天津機器人】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
探索RISC-V在機器人領域的潛力
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
什么是機器人?追溯機器人技術的演變和未來

機器人看點:宇樹新專利可提升機器人表演效果 蔚來資本入股具身智能公司原力靈機 美信科技新設機器人制
機器人關節(jié)模組:類型、設計、工作原理及應用




 工商網監(jiān)
工商網監(jiān)
評論