 機械手通過三種不同的抓取動作“學會”抓取不同形狀和硬度的物體
機械手通過三種不同的抓取動作“學會”抓取不同形狀和硬度的物體

Images: FZI
接近附近的物體似乎是一項無意識的行為,但該行為的發生需要一個復雜的神經網絡,人類花了數百萬年才進化到此。現在,機器人正通過人工神經網絡獲得同樣的能力。在最近的一項研究中,一只機械手通過三種不同的抓取動作“學會”了抓取不同形狀和硬度的物體。
這種發展的關鍵是一種叫做尖峰神經元(spiking neuron)的東西。就像大腦中的真實神經元一樣,尖峰神經網絡(spiking neural network,SNN)中的人工神經元一起對時間信息進行編碼和處理。研究人員研究SNN是因為這種方法可以深入了解生物神經網絡的功能,包括我們自己的神經網絡。
德國FZI Forschungszentrum Informatik的研究人員Juan Camilo Vasquez Tieck說:“類人機器人或仿生機器人的編程非常復雜。而傳統的機器人編程方法并不總是適合利用它們的能力。”
Tieck說,傳統的機器人系統必須進行廣泛的計算,以跟蹤軌跡和抓取物體。但像本文研究的依賴SNN的機器人系統,首先訓練的是神經網絡,來更好地模擬系統和物體的運動。之后,它通過實時適應運動,更自主地掌握項目。
Tieck和他的同事們的新機器人系統使用了一種現有的機械手,名為Schunk SVH 5-finger hand,它的手指和關節數量與人手相同。研究人員在他們的系統中加入了一個SNN,這個系統被分成幾個子網絡。一個子網絡單獨控制每個手指,或彎曲或伸展手指。
對于每個手指,神經電路利用馬達的電流和關節的速度來檢測與物體的接觸。當檢測到與物體接觸時,控制器被激活以調節手指施加的力。
Tieck說:“這樣一來,一般抓取動作可以適應不同形狀、剛度和大小的物體。當物體移動或變形時,該系統還可以快速適應抓取運動。”
機器人抓取系統的具體研究成果發表在10月24日的IEEE Robotics and Automation快報上。研究人員的機械手在不知道物體屬性的情況下,用三種不同的抓取動作來抓物體。目標物體包括一個塑料瓶、一個軟球、一個網球、一塊海綿、一只橡膠鴨子、不同的氣球、一支筆和一個紙巾袋。研究人員發現,首先,捏捏動作比圓柱形或球形抓取動作需要更高的精度。
Tieck說:“對于這種方法,下一步要做的是整合基于事件的攝像機的視覺信息,并將手臂運動與SNN相結合。此外,我們還想用觸覺傳感器來伸展手部。”
他說,長期目標是開發“一種系統,可以執行與人類相似的抓取動作,無需對接觸點進行密集規劃或進行嚴格的穩定性分析,并且能夠利用視覺和觸覺反饋來適應不同的物體。”
責任編輯:PSY
原文標題:人工智能引導機械手學習如何抓取
文章出處:【微信公眾號:IEEE電氣電子工程師學會】歡迎添加關注!文章轉載請注明出處。
-
機器人
+關注
關注
213文章
31079瀏覽量
222266 -
神經網絡
+關注
關注
42文章
4838瀏覽量
107776 -
機械手
+關注
關注
7文章
358瀏覽量
31464
原文標題:人工智能引導機械手學習如何抓取
文章出處:【微信號:IEEE_China,微信公眾號:IEEE電氣電子工程師】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
適配FOUP載具的晶圓搬運機械手,哪些型號維護更便捷?
力傳感器在工業自動化機器人中的應用:精確抓取/裝配作業/搬運作業/柔順控制

商品銷量數據抓取接口

FOSAN 富捷科技:揭秘掃地機器人 “長手” 背后的硬核半導體支撐

應用案例 | 賦能半導體良率躍升!深視智能高速攝像機揭秘晶元抓取微觀世界
拼多多電商 API 接口與競品,數據抓取速度大較量


Allegro Skill布局功能之遠程抓取器件介紹


復合機器人抓取精度的影響因素及提升策略

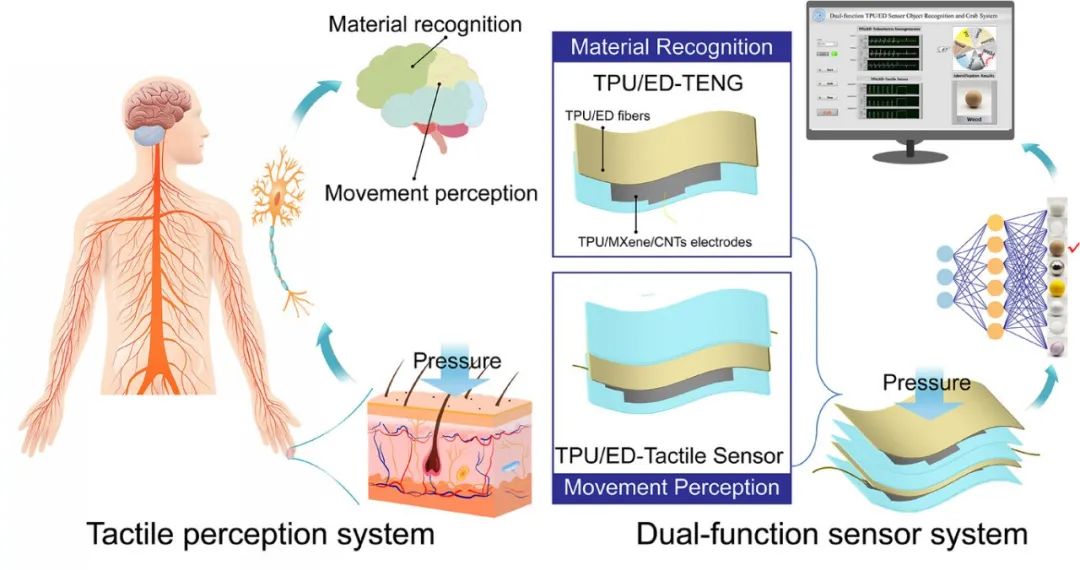
研究基于多功能離子纖維傳感器系統的物體識別和抓取的人工觸覺感知
profinet轉ethercat網關的自動上料機械手集成案例




 工商網監
工商網監
評論