") 基于MLX90316器件執(zhí)行角位置提取的輸出電平后端校準(zhǔn)
基于MLX90316器件執(zhí)行角位置提取的輸出電平后端校準(zhǔn)

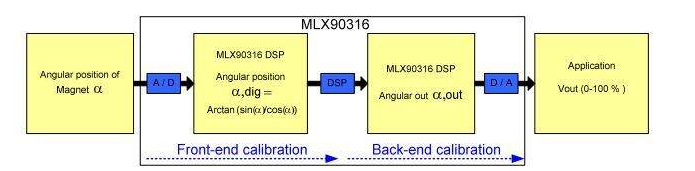
本應(yīng)用筆記描述了由MLX90316器件執(zhí)行的角位置提取(弧形插值)之后的輸出電平的后端校準(zhǔn)。
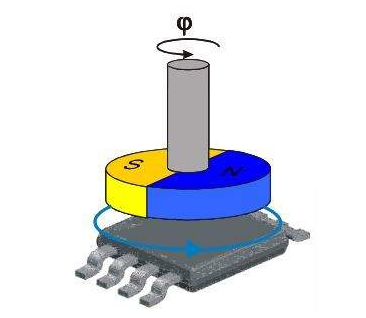
如圖1和圖2所示,如果磁體(徑向磁化)在MLX90316上方旋轉(zhuǎn),則三軸霍爾板會提供兩個正交信號余弦(α)和正弦(α)。參見MLX90316的前端校準(zhǔn)應(yīng)用筆記),將它們轉(zhuǎn)換為角度αdig。=反正切(正弦/余弦)。
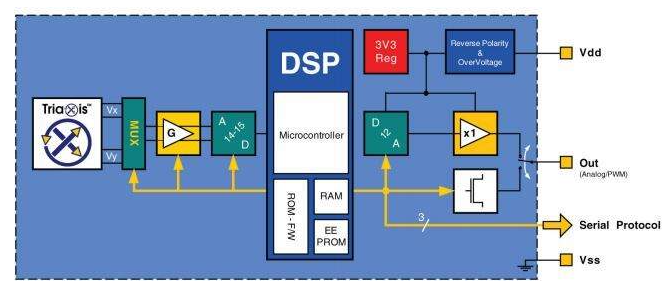
在DSP內(nèi)進(jìn)行進(jìn)一步處理,以將計算出的α,dig轉(zhuǎn)換為輸出值α,out,包括對零位或不連續(xù)點,旋轉(zhuǎn)方向和角度范圍的補(bǔ)償。
然后,將計算出的輸出以數(shù)字形式作為PWM信號/與SPI兼容的串行接口給出,或者通過模擬輸出信號進(jìn)行模擬輸出。
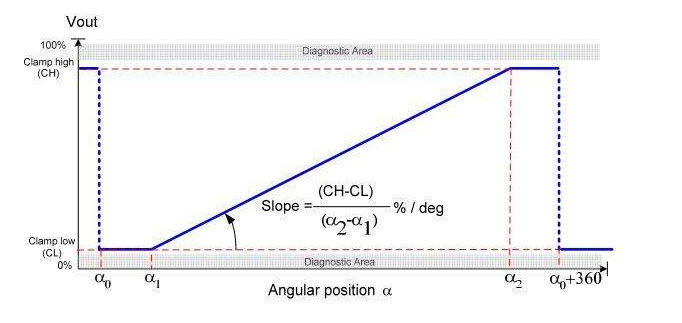
從圖4可以看出,α1和α2之間的機(jī)械輸入角度范圍被線性轉(zhuǎn)換為0-100%之間的輸出水平。MLX90316具有一個EEPROM,用于存儲與芯片功能和輸出特性相關(guān)的所有必要參數(shù)(即α0,α1,α2,CH,CL,…),從而可以調(diào)整輸出曲線特性。
后端校準(zhǔn):減少誤差
失調(diào),相位和幅度主要在IC級別上進(jìn)行修整和補(bǔ)償(請參見MLX90316前端校準(zhǔn)的應(yīng)用筆記),而理想情況下,可以通過補(bǔ)償來補(bǔ)償由于離軸,傾斜和磁誤差引起的整體應(yīng)用線性誤差。輸出傳遞特性的線性化。
結(jié)果
在補(bǔ)償了點A,B的前端和后端誤差之后,我們最終具有以下特征:選擇DP點,以使夾緊下部區(qū)域和夾緊上部區(qū)域的大小相等(= 135度)注意:不包括噪聲和熱誤差。
自動增益控制
為了獲得最佳的信噪比,必須在磁體的磁通密度變化時調(diào)整增益。磁通密度的變化與氣隙變化和溫度變化有關(guān)。90316的微控制器將自動檢查半徑(= sqrt(sin ^ 2 + cos ^ 2)),如果半徑不是ADC范圍的90%,則更改增益。
放大器增益由兩個增益級構(gòu)成:粗增益和精增益。下圖顯示了16個粗增益x 64個細(xì)增益值和相應(yīng)的可用磁場的所有可能組合。精細(xì)增益將主要補(bǔ)償由溫度變化引起的磁通密度的微小變化,而如果精細(xì)增益已達(dá)到極限,則粗增益以步長1增大或減小。
編輯:hfy
-
dsp
+關(guān)注
關(guān)注
561文章
8247瀏覽量
366744 -
放大器
+關(guān)注
關(guān)注
146文章
14345瀏覽量
222087 -
PWM
+關(guān)注
關(guān)注
116文章
5872瀏覽量
225708 -
SPI
+關(guān)注
關(guān)注
17文章
1885瀏覽量
101287
發(fā)布評論請先 登錄
探索英飛凌TLE4802:汽車角位置感應(yīng)的理想之選
Infineon TLE4801:汽車角位置感應(yīng)的理想選擇
深入解析TLE4803:汽車角位置感應(yīng)的理想之選
功率分析儀測量暫態(tài)過電壓時的精度如何校準(zhǔn)?
如何理解芯片設(shè)計中的后端布局布線
求助,關(guān)于ST的IMU和地磁計用motionfx庫融合后航向角異常的問題求解
【RA-Eco-RA4M2開發(fā)板評測】 基于MLX90614的紅外測溫(一)
Melexis的MLX90427更安全,更可靠,性能更高且成本更低

Melexis霍爾效應(yīng)磁位置傳感芯片MLX90427介紹
【RA-Eco-RA4M2開發(fā)板評測】RA-Eco-RA4M2 使用 MLX90614測溫
ST的IMU和地磁計用motionfx庫融合后航向角異常的原因?
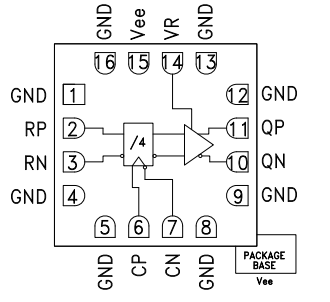
HMC959LC3提供復(fù)位功能和可編程輸出電壓的26GHz 4分頻器件,采用SMT封裝技術(shù)手冊
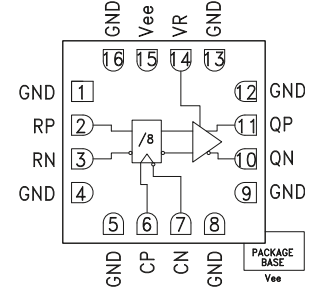
HMC859提供復(fù)位功能和可編程輸出電壓的26 GHz 8分頻器件技術(shù)手冊



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論