 基于圖卷積的層級圖網絡用于基于點云的3D目標檢測
基于圖卷積的層級圖網絡用于基于點云的3D目標檢測

論文:A Hierarchical Graph Network for 3D Object Detection on Point Clouds
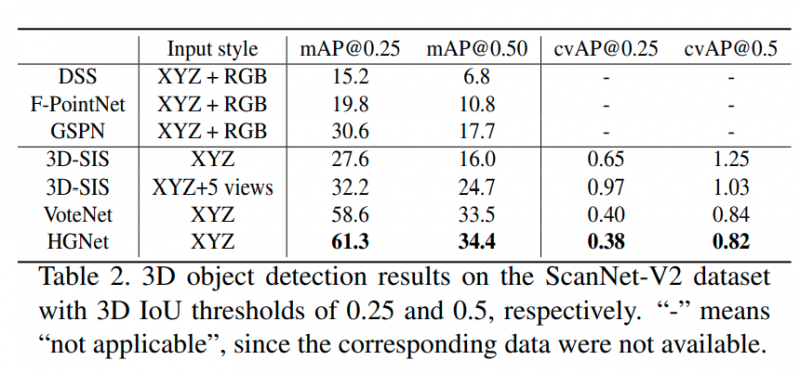
由于大多數現有的點云對象檢測方法不能充分適應點云的特征(例如稀疏性),所以一些關鍵的語義信息(如物體形狀)不能被很好的捕捉到。本文提出了一種基于層級圖網絡(HGNet)的圖卷積(GConv),可以直接將點云作為輸入來預測 3D 的邊界框。形狀注意圖卷積(SA-GConv)可以通過劍魔點的位置星系來描述物體形狀,基于 SA-GConv 的 U 形網絡可以通過改進的 voting 模塊獲取多層級的特征進而生成候選,然后一個基于圖卷積的候選推理模塊考慮全局的場景語義來對邊界框進行預測。該框架在兩個大規模點云數據上的表現超過了目前最先進的模型。
論文背景
由于點云的稀疏性,一些已有的為網格形式數據設計的方法(如 CNN)在點云上的表現并不好,為解決這一問題,最近有一些對點云數據的方法被提出,例如基于投影的方法、基于體卷積的方法和基于 PointNet 的方法。前兩種試圖將點云數據嚴格轉換為網格結構數據,而后一種則在不明確考慮點的幾何位置的情況下聚合特征。
其他方法相比,PointNet++ 可以保留點的稀疏特點,因此被廣泛作為框架的骨架。當目前仍有一些未能很好解決的挑戰,首先由于沒有考慮點的相對幾何位置,因此使用 PointNet++ 作為主干忽略了一些局部形狀信息。其次,框架的結構沒有充分利用多級語義,這可能會忽略一些有助于目標檢測的信息。
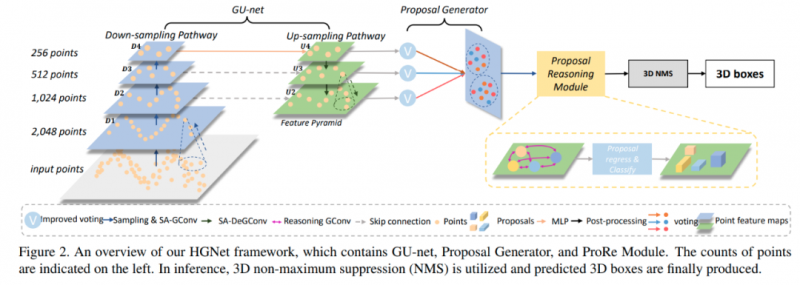
本文提出了一個基于圖卷積(GCONV)的層級圖網絡(HGNet)用于基于點云的 3D 目標檢測。HGNet 包含三部分:一個基于圖卷積的 U 形網絡(GUnet)、一個候選生成器以及一個候選推理模塊(ProRe Module)。基于層級圖網絡(HGNet)的圖卷積
整個 HGNet 以端到端的方式進行培訓。在本文的框架中,點云的局部形狀信息、多級語義和全局場景信息(候選的特征)已被層級圖模型充分捕獲、聚合和合并,充分考慮了點云數據的特征。
本文的主要貢獻如下:
(A)開發了一種新的層級圖網絡(HGNet),用于在點云上進行 3D 對象檢測,其表現好于已有方法。
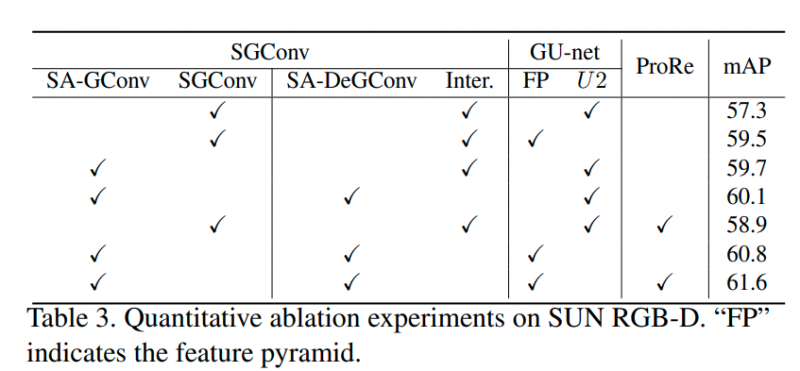
(B)提出了一種新穎的 SA-(De)GConv,它可以有效地聚合特征并捕獲點云中對象的形狀信息。
(C)構建了一個新的 GU-net,用于生成多級特征,這對于 3D 對象檢測至關重要。
(D)利用全局信息,ProRe 模塊通過對候選進行推理來提高效果。
論文模型
融合采樣
3D 目標檢測有基于點和基于體素兩種框架,前者更加耗時,由候選生成與預測細化兩個階段組成。
在第一個階段,SA 用于降采樣以獲得更高的效率以及擴大感受野,FP 用來為降采樣過程中丟掉的點傳播特征。在第二階段,一個優化模塊最優化 RPN 的結果以獲得更準確的預測。SA 對于提取點的特征是必需的。但 FP 和優化模塊會限制效率。
形狀注意圖卷積
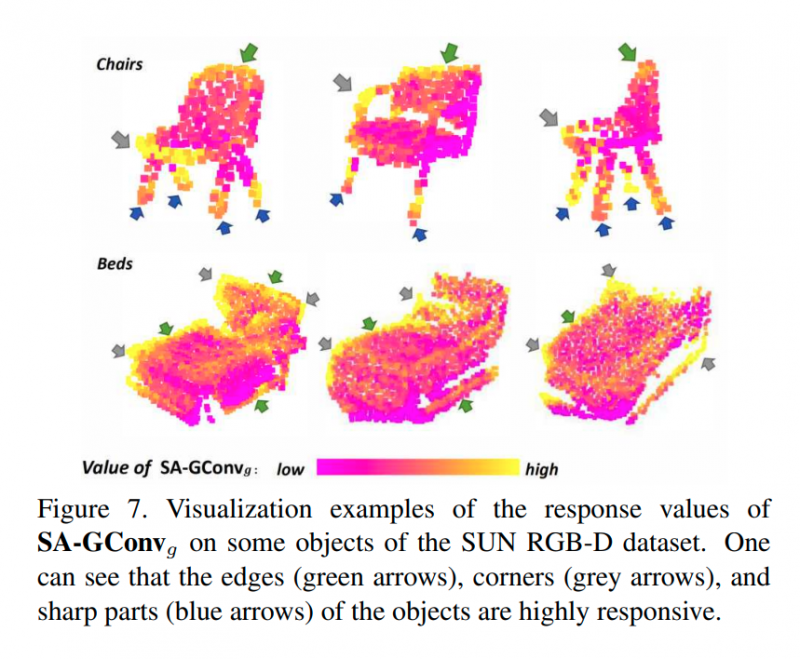
點云通常不能清楚地表示出物體的形狀,可以使用其相鄰點的相對幾何位置來描述點周圍的局部形狀。本文介紹了一種新穎的形狀注意圖卷積,它通過對點的幾何位置建模來捕獲對象形狀。
對于一個點集 X,其中每一個點由其集合位置 p_i 以及 D 維的特征 f_i 組成,我們想要生成一個 X’,本文設計了圖卷積用于聚合從 X 到 X’ 的特征。與 PointNet++的采樣層相類似,本文首先從 n 個點中采樣 n’ 個點,通常 K 最近鄰(KNN)被用來在采樣中保留局部信息將其作為中心點特征。

其中 g 表示 i 和 j 的相對位置,通過一個卷積將三維變為一維,f 是 mlp,然后二者的乘積就是中心點的 knn,其中最大的作為 i 的特征。形狀注意操作不同于簡單的基于 mlp 的操作主要就是因為這個 g 函數。雖然形式上沒有 attention 中的 softmax 這樣的歸一化,但是 g 的輸出就和 attention 一樣,每個點的 weights,然后對應的乘以特征。
GU-net
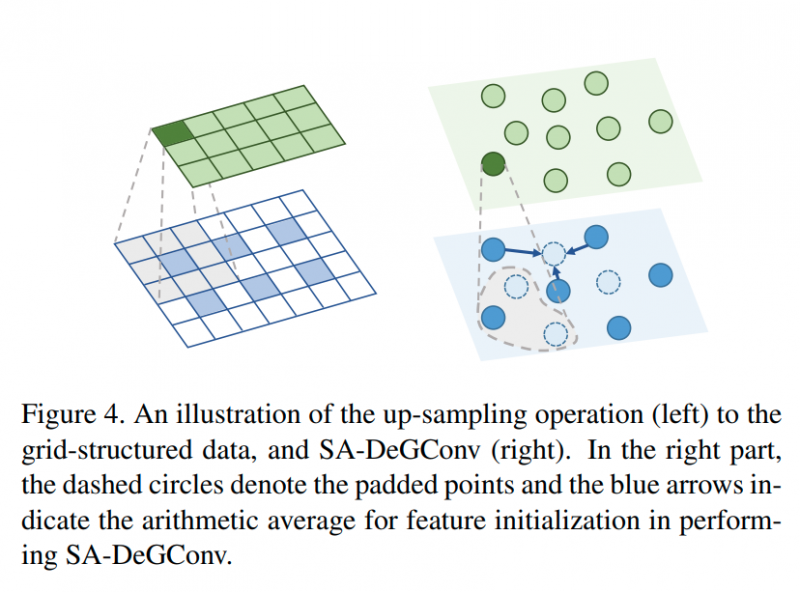
本文設計了一個下采樣模塊,并將其重復堆疊 4 次以形成下采樣路徑,而將一個上采樣模塊重復堆疊兩次以構成上采樣方式。類似 FPN、GU-net 生成三張點特征圖的特征金字塔。下采樣使用的是 FPS,然后通過 KNN 構建局部區域,再使用 SA-GConv 更新特征,上采樣模塊的過程與下采樣模塊的過程相反,主要由 SA-GConv 執行。
候選生成器
GU-net 生成了包含多級語義的三張點特征圖。一些先前的方法(如 VoteNet)僅使用一個特征圖進行目標預測。即使通過在上采樣過程中融合較低層的特征來計算較高層的特征,由于不同層的特征提供了各種語義,因此將多層特征一起用于候選生成會更加有益。本文提出了一種候選生成器,以改進的投票模塊作為主要結構來預測對象中心,該模型將多級特征轉換為相同的特征空間。接下來為了聚合特征,通過 FPS 保留 Np 的投票,該做法與 VoteNet 類似,從而融合多級特征以預測邊界框及其類別。
候選推理模塊
通過以上幾步,多層局部的語義信息已經被很好的捕捉到了,但全局信息還沒有很好的學到,或者說可能有些目標在點云中只體現出很小的一部分表面的點,在這樣少的信息下很難正確的將其識別出來。其推理過程為:

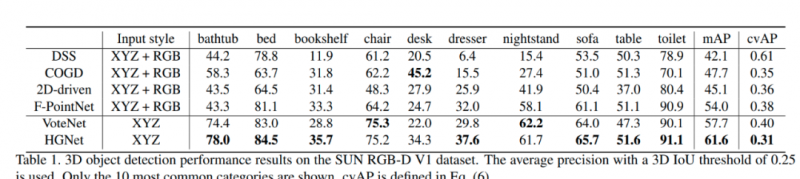
此外,本文還進行了消融實驗以證明各模快的有效性。
結論
本文提出了一種新穎的 HGNet 框架,該框架通過層級圖建模學習語義。
具體來說,作者提出了一種新穎且輕巧的形狀注意圖卷積來捕獲局部形狀語義,該語義聚合了點的相對幾何位置的特征。基于 SA-GConv 和 SA-DeGConv 構建了 GU-net,生成了包含多級語義的特征金字塔。要素金字塔投票的點將位于相應的對象中心,并且進一步聚合多級語義以生成候選。然后使用 ProRe 模塊在候選之間合并和傳播特征,從而利用全局場景語義來提高檢測性能。最后,對邊界框和類別進行了預測。
編輯:hfy
-
圖卷積網絡
+關注
關注
0文章
8瀏覽量
1650
發布評論請先 登錄
光子精密3D工業相機高效質檢連接器pin針
Vitrox的v510i系列的3D AOI光學檢測設備
3D案例丨不良率直降!光子精密3D工業相機專治汽車散熱板測量痛點
iSUN3D即將推出單組分彈性樹脂3D打印解決方案!

一些神經網絡加速器的設計優化方案
【CIE全國RISC-V創新應用大賽】+基于MUSE Pi Pro的3d激光里程計實現
玩轉 KiCad 3D模型的使用
iTOF技術,多樣化的3D視覺應用
3D激光輪廓儀可實現在線3D測量和檢測

海伯森3D閃測傳感器,工業檢測領域的高精度利器


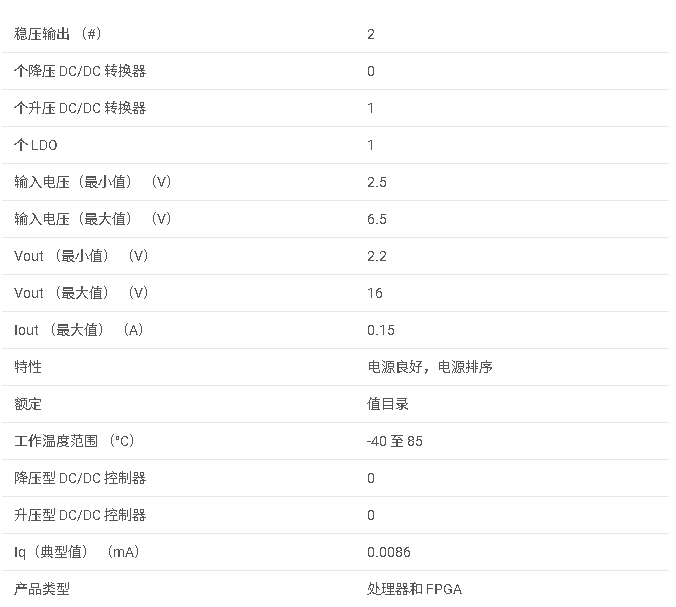
TPS65735 用于主動快門 3D 眼鏡的電源管理 IC數據手冊
一種以圖像為中心的3D感知模型BIP3D




 工商網監
工商網監
評論