") 面向兩臂兩手仿人機(jī)器人的自定義阻抗控制方法
面向兩臂兩手仿人機(jī)器人的自定義阻抗控制方法

當(dāng)使用帶有機(jī)器人手臂系統(tǒng)的工具時(shí),抓取物體的剛度在與交互環(huán)境中起著關(guān)鍵作用,從而使任務(wù)得以成功執(zhí)行。然而,在機(jī)器人系統(tǒng)中,由于其魯棒性和控制的簡(jiǎn)單性,在機(jī)器人系統(tǒng)中使用欠驅(qū)動(dòng)的手的數(shù)量迅速增加,對(duì)可實(shí)現(xiàn)的目標(biāo)剛度造成了限制。事實(shí)上,由于手和手臂的串聯(lián)耦合,由此產(chǎn)生的剛度是由兩個(gè)元件中最柔順的一個(gè)決定的。
為了解決這一問題,研究者提出了一種新的控制器,該控制器考慮了驅(qū)動(dòng)約束的物體剛度橢球體的有限可達(dá)幾何形狀,并利用了機(jī)器人手臂在重塑最終剛度以達(dá)到所需輪廓方面的貢獻(xiàn)。手指頭的協(xié)調(diào)加強(qiáng)說明了這一不足。所提出的方法通過一個(gè)執(zhí)行釘入孔任務(wù)的手臂系統(tǒng)進(jìn)行了實(shí)驗(yàn)驗(yàn)證。
相關(guān)研究成果以“An approach to object-level stiffness regulation of hand-arm systems subject to under-actuation constraints”為題于2020年8月27日在《Autonomous Robots》雜志中發(fā)布。
實(shí)驗(yàn)前景
協(xié)作機(jī)器人技術(shù)是一種迅速出現(xiàn)的技術(shù),因?yàn)樵絹碓蕉嗟男袠I(yè)正在尋求柔性自動(dòng)化系統(tǒng)的競(jìng)爭(zhēng)力。這些機(jī)器人系統(tǒng)被設(shè)想與其人類同事一起工作,以便以富有成效和靈活的方式執(zhí)行廣泛的任務(wù),這通常涉及操作和交互。因此,它們必須包含:能夠執(zhí)行操作的機(jī)器人末端執(zhí)行器(例如:機(jī)器人手、夾持器、吸盤)和在任務(wù)工作區(qū)驅(qū)動(dòng)這種末端執(zhí)行器的機(jī)器人手臂。
然而,用于手臂系統(tǒng)的阻抗控制器卻鮮有研究。有人提出了一種面向兩臂兩手仿人機(jī)器人的自定義阻抗控制方法。該方法是針對(duì)一個(gè)完全可控的身體-手-手臂系統(tǒng)而設(shè)計(jì)的,忽略了手指的滾動(dòng)效應(yīng)。開發(fā)阻抗控制器,主要由手臂驅(qū)動(dòng)整個(gè)系統(tǒng)的依從性,并使用機(jī)器手提供對(duì)象的牢固把握。在這些系統(tǒng)中使用的手的高自由度(自由度)的完全可控性允許執(zhí)行精細(xì)的操作任務(wù)。然而,這不僅意味著設(shè)計(jì)及其相關(guān)成本的復(fù)雜性不斷增加,而且從控制的角度來看也是如此。這種高度的復(fù)雜性是將這些系統(tǒng)部署到實(shí)際的工業(yè)和人-機(jī)器人交互環(huán)境中的問題的根本原因。
為了克服這一障礙,正在開發(fā)機(jī)器軟手和欠驅(qū)動(dòng)手嵌入結(jié)構(gòu)柔順性,可以在減少執(zhí)行機(jī)構(gòu)數(shù)量的同時(shí)處理簡(jiǎn)單的抓取任務(wù)和安全需求。從控制的角度來看,被稱為姿勢(shì)手協(xié)同效應(yīng)的協(xié)調(diào)動(dòng)作被認(rèn)為是解決控制冗余問題的一種方法。然而,這些動(dòng)作不足的機(jī)器軟手主要被用來完成物體周圍的完全閉合。
然而,精細(xì)的操作任務(wù)可能需要更復(fù)雜的掌握。例如,在有作品中研究了執(zhí)行任務(wù)所需的手握柔順性和運(yùn)動(dòng)學(xué)。實(shí)際上,在使用工具執(zhí)行特定任務(wù)時(shí),必須正確地選擇抓取點(diǎn)和阻抗以獲得所需的交互。
實(shí)驗(yàn)想法
提出了一個(gè)控制器來調(diào)節(jié)操作任務(wù)的剛度,該控制器使用指尖抓取器和手臂系統(tǒng),并在手的水平上遵循欠驅(qū)動(dòng)原理。為了說明一個(gè)可能的應(yīng)用場(chǎng)景,使用了和配置相關(guān)剛度(CDS)欠驅(qū)動(dòng)原理的情況。假定抓取剛度的橢球表示,這樣的橢球體是由主軸的方向(橢球體的幾何學(xué))和它的整體體積來定義的。在此框架下,共模剛度(CMS)提供了手指關(guān)節(jié)的協(xié)同強(qiáng)化,即只需一個(gè)參數(shù)就可以修改所有關(guān)節(jié),從而導(dǎo)致橢球體體積的增加或者減少。通過改變手指的姿勢(shì),軸向可以以一種更節(jié)能的方式改變。
在以前的工作中,研究者開發(fā)了兩種不同的方法,在使用CMS/CDS生物啟發(fā)概念的同時(shí),提供了很大的可操作范圍。CMS原則的實(shí)現(xiàn)限制了實(shí)現(xiàn)復(fù)雜操作任務(wù)所需的控制輸入的數(shù)量,將控制引用簡(jiǎn)化為2×n參數(shù)只適用于n+1,在哪里n是手的自由度數(shù)。然而,這種欠驅(qū)動(dòng)原理導(dǎo)致在保持抓取點(diǎn)的同時(shí),手可到達(dá)的剛度幾何圖形的范圍有限,有可能限制手臂系統(tǒng)的整體行為。
因此,針對(duì)手的局限性,該控制器首先找到合適的抓取姿態(tài),以滿足特定任務(wù)的對(duì)象級(jí)剛度方面的交互要求。然后使用ARM笛卡兒阻抗控制器來定位執(zhí)行任務(wù)所需的對(duì)象。此外,所述臂的阻抗控制器用于根據(jù)任務(wù)所需調(diào)節(jié)所獲得的手剛度。因此,本工作的主要貢獻(xiàn)可以概括為:制定一種控制策略,以調(diào)整驅(qū)動(dòng)原則約束的手臂系統(tǒng)的剛度,以及在抓取剛度控制中的適應(yīng)性。一個(gè)新的場(chǎng)景,一個(gè)移動(dòng)的機(jī)器手連接在一個(gè)機(jī)器人手臂上。
分別給出了所研究的欠驅(qū)動(dòng)情況下的被研究的手臂剛度問題和方法,得出主要結(jié)論。
實(shí)驗(yàn)經(jīng)過
在手臂系統(tǒng)中,這兩種元件都有助于完成任務(wù)所需的整體剛度。此外,在與環(huán)境互動(dòng)時(shí),需要對(duì)工具進(jìn)行適當(dāng)?shù)亩ㄎ弧R虼耍瑢⒆ト偠葏?shù)定義在對(duì)象/工具框架層次上比在世界框架中更為合適。
對(duì)于仿真和實(shí)驗(yàn),扭矩控制在自由度為7的機(jī)器人手臂,使用。這只手用一個(gè)定制的法蘭連接到機(jī)器人手臂的末端。
這個(gè)模型是需要的,以找到手的配置,在所期望的方向上給出最高的剛度在目標(biāo)水平,并建立一個(gè)穩(wěn)定的軌道朝它。使用該軟件,手臂也可以建模為一個(gè)手指的手,實(shí)際的手基礎(chǔ)位置可以定義從手臂末端-效應(yīng)器之一。請(qǐng)注意,一個(gè)額外的固定連接是建立在手臂上,以說明法蘭連接臂與手。
在這項(xiàng)工作中,ARM被認(rèn)為是完全可控的,是指導(dǎo)任務(wù)執(zhí)行的一種。因此,在給定手的欠驅(qū)動(dòng)約束和期望的基于任務(wù)的剛度的情況下,該方法首先嘗試找到通過任務(wù)在所需方向上最大限度地提高剛度的手配置。接下來,臂被配置成在任務(wù)所需的方向上定位對(duì)象和由此產(chǎn)生的剛度幾何學(xué),從而要求做出嚴(yán)格的響應(yīng)。最后,手臂直角剛度控制器調(diào)整所產(chǎn)生的抓取剛度(在物體坐標(biāo)中)向預(yù)定的,期望的輪廓。
結(jié)論
經(jīng)過一系列的實(shí)驗(yàn)結(jié)果,需要正確調(diào)整機(jī)器手和機(jī)器手臂兩種元件的剛度,才能實(shí)現(xiàn)適當(dāng)?shù)娜蝿?wù)執(zhí)行,即驅(qū)動(dòng)孔內(nèi)釘。當(dāng)兩個(gè)系統(tǒng)中的一個(gè)沒有適當(dāng)調(diào)整時(shí),手臂系統(tǒng)無法執(zhí)行任務(wù)。通過適當(dāng)調(diào)整每個(gè)欠驅(qū)動(dòng)情況下產(chǎn)生的限制,該方法可推廣到任何具有完全可控臂和欠驅(qū)動(dòng)手的系統(tǒng)。
給定任務(wù)的所需剛度被描述為一組方向,用于最大限度地提高剛度或滿足要求。通過多個(gè)實(shí)驗(yàn)驗(yàn)證了該方法的有效性,證明了采用該方法可以實(shí)現(xiàn)手臂系統(tǒng)剛度的正確調(diào)整,從而成功地完成一項(xiàng)任務(wù)。
責(zé)任編輯:tzh
-
控制器
+關(guān)注
關(guān)注
114文章
17795瀏覽量
193360 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
31092瀏覽量
222347
發(fā)布評(píng)論請(qǐng)先 登錄
復(fù)合機(jī)器人對(duì)比傳統(tǒng)AGV和機(jī)械臂的優(yōu)勢(shì)何在?

高精度機(jī)器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運(yùn)動(dòng)控制方案
中國科學(xué)院研發(fā)3D手型微納機(jī)器人
Arduino Uno l兩輪自平衡機(jī)器人 電機(jī)驅(qū)動(dòng)無輸出求解
機(jī)器人機(jī)械臂效率提升的革命性解決方案:上海永銘電容器實(shí)踐

海默RC系列機(jī)器人控制器

LOTO示波器自定義解碼功能—CANFD解碼


RDK × 腿臂機(jī)器人:這只 “機(jī)械汪” 竟會(huì)說人話、走花路!

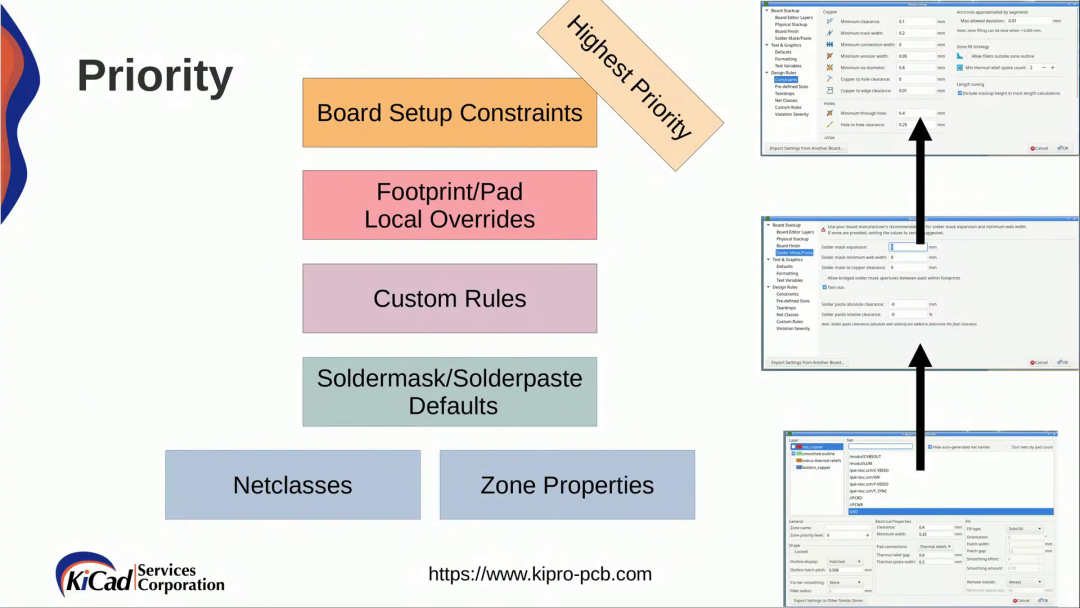
KiCad 中的自定義規(guī)則(KiCon 演講)
HarmonyOS應(yīng)用自定義鍵盤解決方案
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門的引路書
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開源六軸機(jī)械臂產(chǎn)品
LabVIEW運(yùn)動(dòng)控制(三):EtherCAT運(yùn)動(dòng)控制器的高效加工指令自定義封裝



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論