 PID運算程序和初始化程序的實現
PID運算程序和初始化程序的實現

設計中采用了專門的芯片組成了PWM信號的發生系統并且對PWM信號的原理、產生方法以及如何通過軟件編程對PWM信號占空比進行調節從而控制其輸入信號波形等均作了詳細的闡述。另外本系統中使用了紅外對管對直流電機的轉速進行測量,經過整形電路后將測量值送到單片機,并且最終作為反饋值輸入到單片機進行PID運算從而實現了對直流電機速度的控制。在軟件方面,文章中詳細介紹了PID運算程序初始化程序等的編寫思路和具體的程序實現。
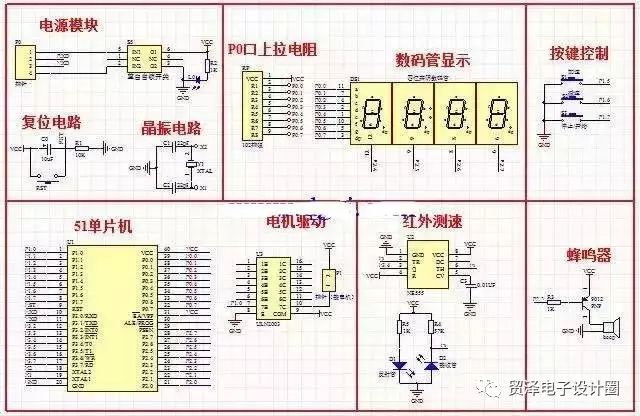
1 單片機最小系統:單片機最小系統由51單片機,晶振電路,復位電路,電源組成。大家都比較熟悉,這里不再贅述。
2 四位數碼管顯示:在應用系統中,設計要求不同,使用的LED顯示器的位數也不同,因此就生產了位數,尺寸,型號不同的LED顯示器供選擇,在本設計中,選擇4位一體的數碼型LED顯示器,簡稱“4-LED”。本系統中前三位顯示電壓的整數位,最后一位顯示轉速的小數位。4-LED顯示器引腳如圖2所示,是一個共陰極接法的4位LED數碼顯示管,其中a,b,c,e,f,g為4位LED各段的公共輸出端,1、2、3、4分別是每一位的位數選端,dp是小數點引出端,4位一體LED數碼顯示管的內部結構是由4個單獨的LED組成,每個LED的段輸出引腳在內部都并聯后,引出到器件的外部。
3 電機驅動電路:電機驅動電中是采用ULN2003來驅動。ULN2003是高耐壓、大電流達林頓陳列,由七個硅NPN達林頓管組成。該電路的特點:ULN2003的每一對達林頓都串聯一個2.7K的基極電阻,在5V的工作電壓下它能與TTL和CMOS電路直接相連,可以直接處理原先需要標準邏輯緩沖器來處理的數據,輸入5VTTL電平,輸出可達500mA/50V。ULN2003的引腳圖,其中IN1~IN7為輸入控制端;OUT1~OUT7為輸出端;8腳為芯片的接地端;9腳為公共端,該腳是內部7個續流二極管負極的公共端,各二極管的正極分別接各達林頓管的集電極。用于感性負載時,該腳接負載電源正極,實現續流作用。如果該腳接地,實際上就是達林頓管的集電極對地接通。
當P1.0中為高電平時,其內部三極管導通,使電機轉動。當P1.0為低電平時,內部三極管截止,電路斷開,電機停止轉動。所以在程序中可以利用P1.0口輸出PWM波來控制電機的轉速。
4 紅外測速電路:發射管工作時發出紅外線,當接收管收到紅外信號時,其電阻變小(本設計相當于從無窮大變到1k左右)。利用其電阻變化,改變接收管分壓情況。擋片是利用圓盤上剪四個孔,當擋片隨電機轉動時,接收管兩端電平發生變化,產生脈沖。
5 整形電路:本設計的整形電路是用555定時器接成的施密特觸發器。
6 源程序:
#include "reg52.h"
#define uchar unsigned char
#define uint unsigned int
uchar code table[10]={0x3f,0x06,0x5b,
0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; //共陰數碼管顯示碼(0-9)
sbit xiaoshudian=P0^7;
sbit wei1=P2^4; //數碼管位選定義
sbit wei2=P2^5;
sbit wei3=P2^6;
sbit wei4=P2^7;
sbit beep=P2^3; //蜂鳴器控制端
sbit motor = P1^0; //電機控制
sbit s1_jiasu = P1^4; //加速按鍵
sbit s2_jiansu= P1^5; //減速按鍵
sbit s3_jiting=P1^6; //停止/開始按鍵
uint pulse_count; //INT0接收到的脈沖數
uint num=0; //num相當于占空比調節的精度
uchar speed[3]; //四位速度值存儲
float bianhuasudu; //當前速度(理論計算值)
float reallyspeed; //實際測得的速度
float vv_min=0.0;vv_max=250.0;
float vi_Ref=60.0; //給定值
float vi_PreError,vi_PreDerror;
uint pwm=100; //相當于占空比標志變量
int sample_time=0; //采樣標志
float v_kp=1.2,v_ki=0.6,v_kd=0.2; //比例,積分,微分常數
void delay (uint z)
{
uint x,y;
for(x=z;x>0;x--)
for (y=20;y>0;y--);
}
void time_init()
{
ET1=1; //允許定時器T1中斷
ET0=1; //允許定時器T0中斷
TMOD = 0x15; //定時器0計數,模式1;定時器1定時,模式1
TH1 = (65536-100)/256; //定時器1值,負責PID中斷 ,0.1ms定時
TL1 = (65536-100)%6;
TR0 = 1; //開定時器
TR1 = 1;
IP=0X08; //定時器1為高優級
EA=1; //開總中斷
}
void keyscan()
{
float j;
if(s1_jiasu==0) //加速
{
delay(20);
if(s1_jiasu==0)
vi_Ref+=10;
j=vi_Ref;
}
while(s1_jiasu==0);
if(s2_jiansu==0) //減速
{
delay(20);
if(s2_jiansu==0)
vi_Ref-=10;
j=vi_Ref;
}
while(s2_jiansu==0);
if(s3_jiting==0)
{
delay(20);
motor=0;
P1=0X00;
P3=0X00;
P0=0x00;
}
while(s3_jiting==0);
}
float v_PIDCalc(float vi_Ref,float vi_SpeedBack)
{
register float error1,d_error,dd_error;
error1=vi_Ref-vi_SpeedBack; //偏差的計算
d_error=error1-vi_PreError; //誤差的偏差
dd_error=d_error-vi_PreDerror; //誤差變化率
vi_PreError=error1; //存儲當前偏差
vi_PreDerror=d_error;
bianhuasudu=(v_kp*d_error+v_ki*vi_PreError+v_kd*dd_error);
return (bianhuasudu);
}
void v_Display()
{
uint sudu;
sudu=(int)(reallyspeed*10); //乘以10之后強制轉化成整型
speed[3]=sudu/1000; //百位
speed[2]=(sudu00)/100; //十位
speed[1]=(sudu0)/10; //個位
speed[0]=sudu; //小數點后一位
wei1=0; //第一位打開
P0=table[speed[3]];
delay(5);
wei1=1; //第一位關閉
wei2=0;
P0=table[speed[2]];
delay(5);
wei2=1;
wei3=0;
P0=table[speed[1]];
xiaoshudian=1;
delay(5);
wei3=1;
wei4=0;
P0=table[speed[0]];
delay(5);
wei4=1;
}
void BEEP()
{
if((reallyspeed)>=vi_Ref+5||(reallyspeed
{
beep=~beep;
delay(4);
}
}
void main()
{
time_init();
motor=0;
while(1)
{
v_Display();
BEEP();
}
if(s3_jiting==0) //對按鍵3進行掃描,增強急停效果
{
delay(20);
motor=0;
P1=0X00;
P3=0X00;
P0=0x00;
}
while(s3_jiting==0);
}
void timer0() interrupt 1
{
}
void timer1() interrupt 3
{
TH1 = (65536-100)/256; //1ms定時
TL1 = (65536-100)%6;
sample_time++;
if(sample_time==5000) //采樣時間0.1ms*5000=0.5s
{
TR0=0; //關閉定時器0
sample_time=0;
pulse_count=TH0*255+TL0; //保存當前脈沖數
keyscan(); //掃描按鍵
reallyspeed=pulse_count/(4*0.6); //計算速度
pwm=pwm+v_PIDCalc(vi_Ref,reallyspeed);
if(pwm
if(pwm>100)pwm=100;
TH0=TL0=0;
TR0=1; //開啟定時器0
}
num++;
if(num==pwm) //此處的num值,就是占空比
{
motor=0;
}
if(num==100) //100相當于占空比調節的精度
{
num=0;
motor=1;
}
}
-
PID
+關注
關注
38文章
1500瀏覽量
91237 -
初始化程序
+關注
關注
1文章
4瀏覽量
6860
原文標題:厲害了我的單片機!看它如何控制PWM信號實現直流電機轉速控制~
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄

MCU工程初始化,到底該不該交給工具?
EtherCAT總線初始化步驟

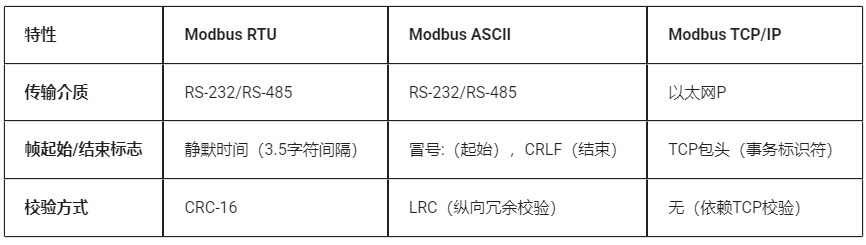
串口通信基石:Air8000下Modbus RTU串口初始化詳解!
NVMe高速傳輸之擺脫XDMA設計33:初始化功能驗證與分析
使用 ICP 編程工具編程時,用戶在啟用后是否需要在程序中初始化看門狗?
GraniStudio:IO初始化以及IO資源配置例程

GraniStudio:初始化例程

MCU外設初始化:為什么參數配置必須優先于使能
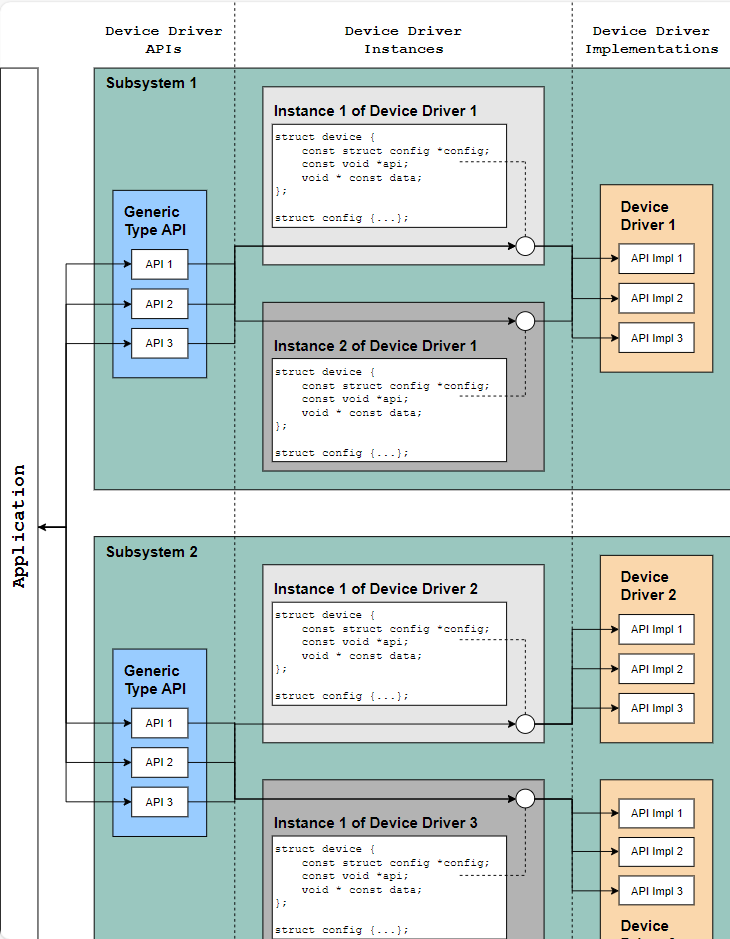
zephyr設備驅動程序模型



 工商網監
工商網監
評論