") 基于線性編程和模糊邏輯的控制系統(tǒng)
基于線性編程和模糊邏輯的控制系統(tǒng)

為由兩個蓄水池和兩個互連的獨立注水井組成的注水系統(tǒng),開發(fā)了一種先進(jìn)的控制策略。使用化工過程仿真軟件,創(chuàng)建動態(tài)仿真模型,可研究不同瞬態(tài)工況,并證明控制策略的可行性,并且無需進(jìn)行現(xiàn)場測試。
該模型仿真了完整的注水系統(tǒng),包括抽油機(jī)、管線和設(shè)施之間的相互作用。利用線性編程技術(shù)(單純形法)和模糊邏輯,為蓄水池和注水井建立獨立的非常規(guī)控制策略,并為系統(tǒng)(注水井)制定通用策略,以保持產(chǎn)出水與注入水之間質(zhì)量平衡的穩(wěn)定。通過與現(xiàn)場歷史數(shù)據(jù)的比較,分析了控制系統(tǒng)在不同運行工況和不必要情況下的過程行為和功能。
石油生產(chǎn)的自動化控制
注水作為一種二次采油技術(shù),在世界范圍內(nèi)被認(rèn)為是最常用的方法之一,也是對石油生產(chǎn)貢獻(xiàn)最大的一種方法。在哥倫比亞,許多油田都采用這種方法擴(kuò)大產(chǎn)量。抽油系統(tǒng)的自動化和控制是調(diào)節(jié)注水量、有效提高原油產(chǎn)量的基礎(chǔ)。
位于哥倫比亞Meta的一個油田具備注水的條件,但沒有自動化控制系統(tǒng)來穩(wěn)定設(shè)施以避免產(chǎn)生運營報警,也就無法在預(yù)防和糾正措施上產(chǎn)生有效的響應(yīng)方式。
該系統(tǒng)的設(shè)施可以處理采出水,然后將其泵送至注水井1和注水井3。常見問題包括工業(yè)用水的泵機(jī)組損失、兩個互聯(lián)設(shè)施(注水井)中注入裝置的損失以及注入流量或生產(chǎn)水量的變化。
為了解決這一系列問題,該油田開發(fā)了包括過程工程和先進(jìn)控制策略的先進(jìn)工程系統(tǒng)。這包括使用過程仿真器軟件構(gòu)建動態(tài)模型,以動態(tài)方式觀察系統(tǒng)行為,并將其與預(yù)設(shè)的控制策略集成。開發(fā)的控制方案包括基于模糊邏輯的非常規(guī)策略,在這種策略中,泵組的吸入和排出壓力可與通過每個裝置的流量相互作用。
通過先進(jìn)的控制策略來統(tǒng)一管理注入系統(tǒng)(生產(chǎn)水處理和注入設(shè)施),其重點是實現(xiàn)和維持生產(chǎn)量與注入量之間的質(zhì)量平衡,在每個設(shè)施中自動分配注入流量設(shè)定值。這種策略可以為整個注水系統(tǒng)提供更大的自治性、穩(wěn)定性和運行連續(xù)性。
生產(chǎn)水處理設(shè)施由兩個相互連接的蓄水池組成,每個水池配置8個抽水裝置,包括多級離心泵和內(nèi)燃機(jī)泵等,這些抽水裝置通過3個直徑為30英寸的管道,將水轉(zhuǎn)移到注水井中。
由于運行變量之間存在多種相互作用,因此該系統(tǒng)被認(rèn)為是非線性的,需要非常規(guī)工具來建模和定義要實施的控制策略。
動態(tài)仿真和控制策略
在化學(xué)工藝仿真軟件中,建立注水系統(tǒng)的動態(tài)仿真模型。初始階段,在穩(wěn)態(tài)下構(gòu)建該模型,以確保系統(tǒng)的穩(wěn)定性。然后將其切換到動態(tài),以表征實際過程行為,并對任何干擾進(jìn)行評估。在此階段,確定系統(tǒng)中存在的流體屬性、初始運行條件、泵送裝置數(shù)量、管道直徑和長度以及其它附件。邊界條件包括諸如系統(tǒng)出、入口流體中的壓力規(guī)格,并且用各自曲線來表征的泵。池裝置的效率損失約為15%。
隨后,通過模擬特定現(xiàn)場條件,并與歷史數(shù)據(jù)進(jìn)行比較,對模型進(jìn)行驗證,結(jié)果發(fā)現(xiàn)平均偏差為5%。該模型的行為與歷史數(shù)據(jù)相符,因此可將其用于分析系統(tǒng)的行為。
最后,對不同的案例研究進(jìn)行評估。分析設(shè)施的行為,就好像它在工廠設(shè)備上運行一樣。利用這些研究結(jié)果對控制系統(tǒng)進(jìn)行優(yōu)化,并為過程提供適當(dāng)?shù)目刂撇呗浴?/p>
在高級控制區(qū)域,重建了設(shè)施中安裝在可編程邏輯服務(wù)器仿真器上的控制系統(tǒng),并開發(fā)了雙向通信接口,該接口允許過程模擬器和仿真控制系統(tǒng)之間進(jìn)行實時通信。仿真工具有助于重現(xiàn)為注入系統(tǒng)運行開發(fā)的控制邏輯。
通過仿真可以確定感興趣變量的非線性行為,因此基于模糊邏輯的控制可以更好的適應(yīng)系統(tǒng)的行為,因為它提供了一種推理機(jī)制,允許在基于知識的系統(tǒng)中模擬人類推理的過程,這意味著可以模仿諸如操作人員在已知情況下加速或減速泵的行為。
為了統(tǒng)一注入系統(tǒng),質(zhì)量平衡被解釋為成本函數(shù),并通過線性編程技術(shù)解決,重點是使流量最大化。每個設(shè)施必須優(yōu)化流量設(shè)定值,以使注入量最大化,但受限于上述條件。
單純形法是一個迭代過程,可以在每個步驟中改進(jìn)目標(biāo)函數(shù)。在無法繼續(xù)提高時,過程結(jié)束,這意味著已實現(xiàn)滿足所有限值的最佳解決方案。在注入系統(tǒng)中實施高級控制策略分為兩個階段。
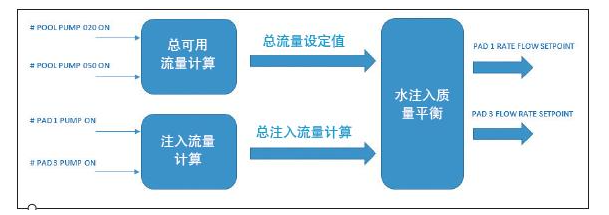
圖1:階段1–集成注入系統(tǒng)的全局控制策略:高級控制區(qū)在可編程邏輯服務(wù)器仿真器上重建控制系統(tǒng),并開發(fā)了雙向通訊接口,用于過程仿真器之間的實時通訊和仿真控制系統(tǒng)。本文圖片來源:ProctekSAS
階段1:注入系統(tǒng)集成
第一階段的策略是尋求增加油田產(chǎn)量。為此,選擇直接影響生產(chǎn)的變量:注入流量。隨后發(fā)現(xiàn)一個數(shù)學(xué)函數(shù),來描述約束和系統(tǒng)元素限制條件下的變量行為。以最大化為目標(biāo)解決該功能,展示最佳工作點,可以最大程度地提高流量注入并提高采油量。與注入系統(tǒng)集成的控制系統(tǒng)如圖1所示。
成本函數(shù)的重點是在從池中抽出的采出水與每個注水井的注入水之間找到質(zhì)量平衡。為了確定平衡,可從每個池中立式泵的運行特性出發(fā)。必須將總流量有效地分配到每個注水井上。分配標(biāo)準(zhǔn)取決于幾個因素:
●每個注水井中啟動的可用裝置的數(shù)量;
●每個裝置的注入量;
●將管道連接到每個注水井的閥門位置。
分配算法的功能是找到最佳流速設(shè)定值,并將其自動分配給每個擴(kuò)散控制面板以注入流量,并建立平衡。為了實現(xiàn)此目標(biāo),必須考慮以下條件:
●必須利用安裝在水池出口處的流量計以及安裝在互連點和每個注水井入口處的流量計,對質(zhì)量平衡進(jìn)行不間斷驗證。
●如果無法通過注入系統(tǒng)的瞬時工況達(dá)到規(guī)劃的質(zhì)量平衡,則控制系統(tǒng)通知運行人員啟動或停止注水井的泵送裝置。
●如果在水池和注水井中存在泵送裝置的損失,控制系統(tǒng)應(yīng)重新計算流量設(shè)定值,以確定喪失的注入能力并重新計算新的質(zhì)量平衡。
階段2:控制策略設(shè)計
這一階段的策略是尋求為系統(tǒng)提供更優(yōu)的穩(wěn)定性和自治性,以解決過程中出現(xiàn)的、無法通過手動操作及時有效緩解的干擾。所提出的控制策略需要在注入系統(tǒng)中相互作用的3個變量(流量、吸入壓力和排出壓力)之間實現(xiàn)動態(tài)平衡。
由于該模型具有很強的非線性(通過動態(tài)過程模型證明),無法對唯一的常規(guī)控制回路進(jìn)行調(diào)節(jié),沒有考慮吸入和排出壓力的變化。因此,基于模糊邏輯的控制器,可以更好地適應(yīng)系統(tǒng)行為。然而,模糊邏輯控制器的概念開發(fā)是一項復(fù)雜的工程,并且具有很高的計算需求。
由于這些原因,確定需要為與泵相互作用的每個變量,設(shè)計一個擴(kuò)散控制器。唯一可以使用的控制元件,是調(diào)節(jié)內(nèi)燃機(jī)速度的調(diào)速器。必須為調(diào)速器選擇唯一的控制輸出。遵循與模糊控制器一樣的方案,最終輸出根據(jù)每個模糊控制器的輸出隨時間變化的動態(tài)行為而確定。
模糊控制塊
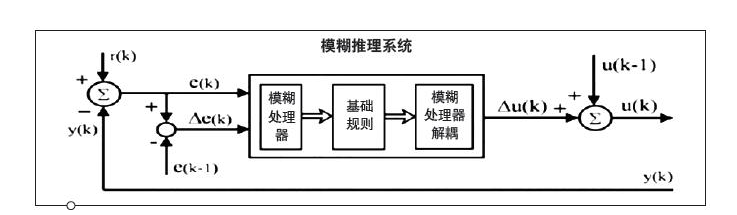
圖2:模糊邏輯控制器的一般方案。過程模擬器展示了注入系統(tǒng)運行的控制邏輯。
模糊邏輯控制器由控制塊組成,控制塊負(fù)責(zé)接收過程變量偏差(過程變量相對于設(shè)定值的百分比誤差)。圖2給出了“模糊控制”塊所有回路的基本方案。在該案例中,過程變量的輸入偏差為:
e(k)=PV(k)SP(k)
增量偏差為:
e(k)=e(k)-e(k-1)
該方案采用模糊設(shè)計器工具,其中有兩個模糊輸入集,第一個用于輸入偏差,第二個用于增量偏差。
該想法是通過與模糊輸入集的相互作用,來模仿專家行為。在這種情況下,目標(biāo)是檢測到目標(biāo)變量出現(xiàn)偏差時采取措施,來模仿運行人員的專業(yè)知識。為了重現(xiàn)該知識,創(chuàng)建規(guī)則來評估每個模糊集的交互,并將它們與輸出關(guān)聯(lián)。
在此輸出集的擴(kuò)散控制器上執(zhí)行一系列操作,允許每個控制面板獲得唯一的受控變量值。依次對這些參數(shù)進(jìn)行評估,以確定在3個參數(shù)中選擇哪個參數(shù)應(yīng)用于調(diào)速器。
為控制器做出的決定應(yīng)基于運行人員的經(jīng)驗,并在啟發(fā)式方法的基礎(chǔ)上建立規(guī)則。如果關(guān)閉注水井1,則會重新計算流速設(shè)定值,并將喪失的流量分配給注水井3的設(shè)定值。這樣,盡管泵送裝置喪失,但仍能維持相同的注入率。維持主動分配策略,可以看到注入流量的增加,從而增加石油產(chǎn)量。
過程模擬器的好處
通過開發(fā)一套先進(jìn)的工程系統(tǒng),可以將過程工程和先進(jìn)的控制策略相結(jié)合,以實現(xiàn)對采油設(shè)施中注水流量的優(yōu)化。由于系統(tǒng)呈現(xiàn)非線性,因此新方案采用了線性編程技術(shù)(單純形法)和基于模糊邏輯的控制。最初開發(fā)的控制策略,已在化工過程仿真軟件中進(jìn)行了動態(tài)仿真測試,以評估動態(tài)系統(tǒng)行為和可能影響正常運行的常見干擾。
在對多個系統(tǒng)和過程工廠進(jìn)行優(yōu)化時,利用過程模擬器可顯示由此獲得的諸多好處。這是由于模型的更改所致,它允許評估不同的方案,而無需花費很長時間和大量資源進(jìn)行現(xiàn)場測試。
基于高級控制的注水系統(tǒng)允許控制總的注入流量,提高油田產(chǎn)量。此外,在過程中檢測到偏差時,能夠及時響應(yīng),減少這些偏差可能會導(dǎo)致人員傷害、貨物損失或產(chǎn)量降低的可能性。(作者:Juan David,Medina Gonzalez)
編輯:hfy
-
調(diào)速器
+關(guān)注
關(guān)注
8文章
149瀏覽量
33788 -
模擬器
+關(guān)注
關(guān)注
2文章
1010瀏覽量
45668 -
邏輯控制器
+關(guān)注
關(guān)注
0文章
44瀏覽量
9767
發(fā)布評論請先 登錄
PLC控制系統(tǒng)應(yīng)用的抗干擾問題分析及處理措施




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論