") 基于靈動微電子MM32F013x 系列的UART硬件自適應(yīng)波特率
基于靈動微電子MM32F013x 系列的UART硬件自適應(yīng)波特率

嵌入式工程師在開發(fā)產(chǎn)品中經(jīng)常會用到MCU的片上UART和其它模塊進行通信,為了在某些非正常的惡劣環(huán)境下能正常使用串口通信,可能需要對UART通信波特率進行自適應(yīng)校準,在我們之前的微課堂中講解過關(guān)于MM32通用MCU的UART串口通信方面的基礎(chǔ)知識,這里我們增加基于靈動微電子MM32F013x 系列UART硬件自適應(yīng)波特率的使用。
1、原理
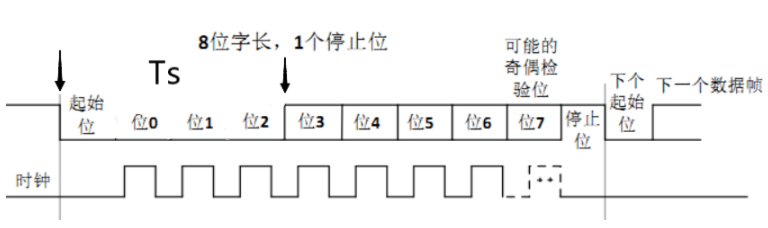
UART硬件波特率自適應(yīng)檢測首個通信字節(jié)的位寬(1bit、2bit、4bit、8bit),檢測前一個邊沿和后一個邊沿之間的位長,即檢測前一個邊沿為下降沿,后一個邊沿為上升沿或前一個邊沿為下降沿,后一個邊沿為下降沿,可通過軟件靈活配置。
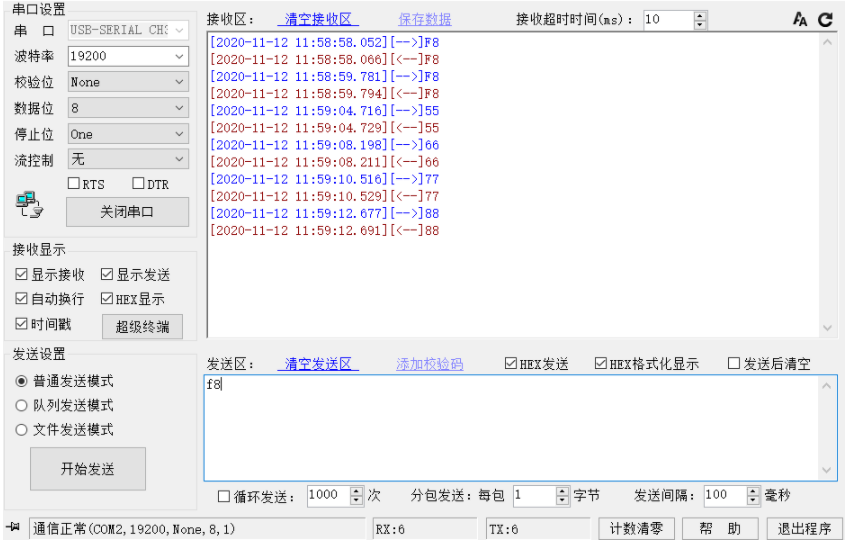
本實例以串口工具作為上位機,MM32F013x的UART1作為下位機,MCU端初始化為非標準波特率9200,使能空閑中斷及其他狀態(tài)標志位,上位機切換不同的波特率,由于上位機和MCU端的波特率不同,可能出現(xiàn)通信失敗的情況,啟動UART硬件波特率自適應(yīng)功能,即檢測上位機發(fā)的首個字節(jié)位寬來識別上位機的波特率,MCU端通過硬件波特率自適應(yīng)切換到對應(yīng)的波特率,與上位機維持后續(xù)正常的通信。
如下圖所示,以首字節(jié)0XF8為例,首字節(jié)位寬為4bit的原理說明:
2、程序配置
2.1 初始化MM32F013x UART1串口
從官網(wǎng)下載MM32F013x例程,這里我們在MM32F0133C7P的樣例程序中添加注釋并對代碼修改。
#include "bsp_UART.h" #include "led.h" /******************************************************************************* * 函數(shù)名稱:void bsp_UART1_Init(u32 baudrate) * 函數(shù)功能:初始化UART1 PA9/PA10分別作為UART1的TX/RX * 輸入?yún)?shù):無 * 返回數(shù)值:無 ******************************************************************************/ void bsp_UART1_Init(u32 baudrate) { //GPIO初始化結(jié)構(gòu)體 GPIO_InitTypeDef GPIO_InitStructure; //UART初始化結(jié)構(gòu)體 UART_InitTypeDef UART_InitStructure; //NVIC初始化結(jié)構(gòu)體 NVIC_InitTypeDef NVIC_InitStructure; //使能UART1時鐘 RCC_APB2PeriphClockCmd(RCC_APB2Periph_UART1, ENABLE); //使能GPIOA時鐘 RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE); //開啟GPIOA PA9復(fù)用于UART1_TX功能 GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_1); //開啟GPIOA PA10復(fù)用于UART1_RX功能 GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_1); //UART1_TX GPIOA.9 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //配置GPIOA.9 速度為高速50MHz GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //配置GPIOA.9為復(fù)用推挽輸出 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //根據(jù)GPIO結(jié)構(gòu)體初始化UART1_TX GPIOA.9 GPIO_Init(GPIOA, &GPIO_InitStructure); //UART1_RX GPIOA.10 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //配置UART1_RX GPIOA.10為上拉輸入 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //根據(jù)GPIO結(jié)構(gòu)體初始化UART1_RX GPIOA.10 GPIO_Init(GPIOA, &GPIO_InitStructure); //串口波特率 UART_InitStructure.UART_BaudRate = baudrate; //字長為8位數(shù)據(jù)格式 UART_InitStructure.UART_WordLength = UART_WordLength_8b; //一位停止位 UART_InitStructure.UART_StopBits = UART_StopBits_1; //無奇偶校驗位 UART_InitStructure.UART_Parity = UART_Parity_No; //無硬件數(shù)據(jù)流控 UART_InitStructure.UART_HardwareFlowControl = UART_HardwareFlowControl_None; //允許收發(fā)模式 UART_InitStructure.UART_Mode = UART_Mode_Rx | UART_Mode_Tx; //根據(jù)UART結(jié)構(gòu)體初始化串口UART1 UART_Init(UART1, &UART_InitStructure); //硬件自動波特率檢測第1個字節(jié)位的位寬前一個邊沿為下降沿,后一個邊沿為上升沿 //___ _______ // |_ _ _ _|1 x x x x| = Binary:xxxx 1000 Fall to Rise -> 1 start bit //AutoBaudRate Mode Fall to Rise 4bit width,the first byte is 0xF8 use test UART_AutoBaudRateSet(UART1, ABRMODE_FALLING_TO_RISINGEDGE4BIT, ENABLE); //接收數(shù)據(jù)中斷、接收幀錯誤中斷、自動波特率結(jié)束中斷、自動波特率錯誤中斷、空閑中斷 UART_ITConfig(UART1, UART_IT_RXIEN | UART_ICR_RXFERRCLR | UART_ICR_ABRENDCLR |\ UART_ICR_ABRERRCLR | UART_ICR_RXIDLE | UART_IT_ERR, ENABLE); //使能UART1 UART_Cmd(UART1, ENABLE); //UART1 NVIC中斷優(yōu)先級設(shè)置 NVIC_InitStructure.NVIC_IRQChannel = UART1_IRQn; //UART通道優(yōu)先級0 NVIC_InitStructure.NVIC_IRQChannelPriority = 0; //IRQ通道使能 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //根據(jù)指定的參數(shù)初始化NVIC寄存器 NVIC_Init(&NVIC_InitStructure); }
2.2 編寫MM32F013x UART1串口中斷服務(wù)函數(shù)
繼續(xù)在bsp_UART.c文件中編寫MM32F013x UART1串口中斷服務(wù)函數(shù)如下所示。
/*******************************************************************************
* 函數(shù)名稱:void UART1_IRQHandler(void)
* 函數(shù)功能:串口1 UART1中斷服務(wù)程序
* 輸入?yún)?shù):無
* 返回數(shù)值:無
*******************************************************************************/
//自動波特率幀錯誤標志
u8 Auto_BaudRate_FraErr_Flag = 0;
void UART1_IRQHandler(void)
{
u8 Res;
//UART1接收中斷
if(UART_GetITStatus(UART1, UART_IT_RXIEN) != RESET)
{
//清UART1接收中斷標志
UART_ClearITPendingBit(UART1,UART_IT_RXIEN);
//讀取UART1接收到的數(shù)據(jù)
Res = UART_ReceiveData(UART1);
//UART1接收數(shù)據(jù)緩存起來,最大接收UART1_REC_LEN個字節(jié)
UART1_Rx_Buf[UART1_Rx_Cnt] = Res;
//UART1作接收緩存溢出判斷,最大接收UART1_REC_LEN個字節(jié)
if(UART1_Rx_Cnt < UART1_REC_LEN-1)
{
//還有數(shù)據(jù)要接收,接收計數(shù)變量自加
UART1_Rx_Cnt++;
}
else
{
UART1_Rx_Cnt = 0;
}
}
//幀錯誤中斷標志位
if(UART_GetITStatus(UART1, UART_IER_RXFERR) != RESET)
{
//自動波特率幀錯誤標志置1
Auto_BaudRate_FraErr_Flag = 1;
//清幀錯誤中斷標志位
UART_ClearITPendingBit(UART1,UART_IER_RXFERR);
}
//接收數(shù)據(jù)幀錯誤中斷
if(UART_GetITStatus(UART1, UART_ICR_RXFERRCLR) != RESET)
{
UART_ClearITPendingBit(UART1,UART_ICR_RXFERRCLR);
}
//空閑中斷硬件波特率自校準
if(UART_GetITStatus(UART1, UART_ICR_RXIDLE) != RESET)
{
UART_ClearITPendingBit(UART1,UART_ICR_RXIDLE);
//自動波特率幀錯誤標志
if(Auto_BaudRate_FraErr_Flag == 1)
{
Auto_BaudRate_FraErr_Flag = 0;
//----------------Check MM32F013x UART_AutoBaudRateHard----------
//___ _______
// |_ _ _ _|1 x x x x| = Binary:xxxx 1000 Fall to Rise -> 1 start bit
//AutoBaudRate Mode Fall to Rise 4bit width,the first byte is 0xF8 use test
UART_AutoBaudRateSet(UART1, ABRMODE_FALLING_TO_RISINGEDGE4BIT, ENABLE);
}
}
//自動波特率錯誤中斷清除位
if(UART_GetITStatus(UART1, UART_ICR_ABRERRCLR) != RESET)
{
UART_ClearITPendingBit(UART1,UART_ICR_ABRERRCLR);
}
//自動波特率結(jié)束中斷清除位
if(UART_GetITStatus(UART1, UART_ICR_ABRENDCLR) != RESET)
{
UART_ClearITPendingBit(UART1,UART_ICR_ABRENDCLR);
}
}
2.3 MM32F013x UART1串口接收函數(shù)
在bsp_UART.h文件中宏定義UART1波特率、接收字節(jié)長度,變量聲明以及UART1接收數(shù)據(jù)函數(shù)和發(fā)送數(shù)據(jù)函數(shù)聲明。
void UART1_Recv_Task(void)
{
//收到的數(shù)據(jù)原樣返回到串口上位機
UART_SendBytes(UART1,UART1_Rx_Buf, UART1_Rx_Cnt);
}
2.4 MM32F013x UART串口發(fā)送函數(shù)
在bsp_UART.c文件中編寫MM32F013x UART1發(fā)送數(shù)據(jù)函數(shù),發(fā)送單字節(jié)數(shù)據(jù)和發(fā)送多字節(jié)數(shù)據(jù)函數(shù)分別如下所示:
/*******************************************************************************
* 函數(shù)名稱:void UART_SendByte(UART_TypeDef* UARTx,u8 dat)
* 函數(shù)功能:UART發(fā)送單字節(jié)數(shù)據(jù)
* 輸入?yún)?shù):UARTx:UART1/UART2;dat:待發(fā)送的數(shù)據(jù)
* 返回數(shù)值:無
*******************************************************************************/
void UART_SendByte(UART_TypeDef* UARTx,u8 dat)
{
UART_SendData(UARTx, dat);
while(!UART_GetFlagStatus(UARTx, UART_FLAG_TXEPT));
}
/*******************************************************************************
* 函數(shù)名稱:void UART_SendBytes(UART_TypeDef* UARTx,u8* buf, u16 len)
* 函數(shù)功能:UART發(fā)送多字節(jié)數(shù)據(jù)
* 輸入?yún)?shù):UARTx:UART1/UART2;buf:待發(fā)送的數(shù)據(jù);len:待發(fā)送數(shù)據(jù)的長度
* 返回數(shù)值:無
*******************************************************************************/
void UART_SendBytes(UART_TypeDef* UARTx,u8* buf, u16 len)
{
while(len--)
{
UART_SendByte(UARTx,*buf++);
}
}
3、MM32F013x UART硬件 自適應(yīng)波特率的功能演示
在main.c文件的main函數(shù)里初始化bsp_UART1_Init(9200)串口初始化函數(shù),在while(1)大循環(huán)里調(diào)用測試UART1硬件自動波特率收發(fā)數(shù)據(jù)函數(shù):UART1_Recv_Task();這里以檢測UART1通信首字節(jié)為4bit寬為例,模式為前一個邊沿為下降沿,后一個邊沿為上升沿。
MCU端設(shè)置非標準波特率9200,我們通過上位機以不同的波特率發(fā)送F8進行硬件波特率自適應(yīng),自適應(yīng)完成后UART1就切換到對應(yīng)的波特率,MCU端收到數(shù)據(jù)后直接返回給上位機。
編輯:hfy
-
mcu
+關(guān)注
關(guān)注
147文章
18547瀏覽量
384472 -
uart
+關(guān)注
關(guān)注
22文章
1302瀏覽量
106018 -
串口通信
+關(guān)注
關(guān)注
34文章
1656瀏覽量
57588
發(fā)布評論請先 登錄
UART波特率計算及UART收發(fā)回顯實驗

波特率是什么
靈動微電子推出基于Arm Cortex-M0+內(nèi)核的MM32G0005系列MCU

靈動微電子MM32MCU的主流型芯片選型

靈動微電子推出全新超值型MM32F0050系列MCU

AN-891: ADuC703x系列LIN波特率計算

靈動微電子MM32F5370 MCU產(chǎn)品特色





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論