 光電滑移傳感器:直接對相對滑移進行檢測,滿足機器人方案需求
光電滑移傳感器:直接對相對滑移進行檢測,滿足機器人方案需求

在復雜環境中工作的機器人必須滿足這樣的先決條件:能夠利用傳感器對周圍環境進行識別,具有一定的“學習”和“自我調節”能力。在市場上,有著各種依靠圖像監控或力的檢測來控制機器人的傳感器,但是仍缺乏“滑移”傳感器,即能夠對機器人的手指與被握物體之間的相對運動進行在線檢測和補償的傳感器。
建議您采用的大多數解決方案都是基于切向力或者摩擦力檢測為基礎的。即利用接觸傳感器對接觸時的切向力大小進行檢測或者利用摩擦振動加速傳感器對相對位移間接進行檢測和估計。而迄今為止常見的傳感器還無法對相對滑移速度進行直接的檢測。較高的研發費用是一直沒有成功實現相對滑移直接檢測技術工業化應用的主要原因。
與現在建議使用的方案不同,在IITB霍倫霍夫研究所中研發成功的光學傳感器能夠直接對相對滑移進行檢測。結合接觸力檢測傳感器可以滿足要求極高的智能化機器人方案。在這個方案中,能夠經濟合理的使用光學傳感器,由于其結構緊湊可以很好的集成在機械和機床設備中。
這種方案的應用領域非常廣泛,但是目前主要集中在下列兩個領域中:
(1)依靠力量進行可靠夾持和操縱的易碎工件;
(2)無定位或者可移動工件的表面擦洗和磨削。
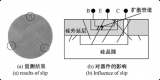
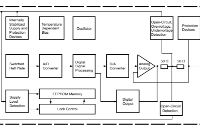
光電滑移傳感器的工作原理類似光電鼠標。與機器人手指接觸的物體表面被發光二極管或激光二極管發出的光線照射著,由被照射物體表面反射回來的光線經透鏡折射后進入傳感器芯片中的微型攝像機中(圖1)。攝取的圖像作為灰度等級圖片進入傳感器芯片中的DSP數字信號處理器,并在這個微處理器中首次被轉換成速度信號。最后,再根據這些速度信號計算出滑移數據(△x和△y值)。
速度計算過程中使用的計算語言是光流語言,計算量較小。作為光流(Optical Flow)實際上是一個矢量場,它能夠表示每一個圖片、像素,圖像順2D運動方向和速度的矢量場。
責編AJX
-
傳感器
+關注
關注
2576文章
55041瀏覽量
791326 -
機器人
+關注
關注
213文章
31079瀏覽量
222244
發布評論請先 登錄
集成電路制造中滑移線缺陷的概念和來源
溫度傳感器IC掃地機器人應用方案
安森美傳感器芯片創新突破機器人感知邊界
光電傳感器:機器人大戰中的隱形指揮官
高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
人形機器人傳感器產業鏈最新分析:力、觸覺、IMU、視覺傳感器為主流!(全面)

機器人領域中的溫度傳感器技術及其應用:機器人溫度監測,提升機器人工作穩定性




 工商網監
工商網監
評論