") 測(cè)試自動(dòng)駕駛的代碼與測(cè)試普通互聯(lián)網(wǎng)產(chǎn)品的代碼不同
測(cè)試自動(dòng)駕駛的代碼與測(cè)試普通互聯(lián)網(wǎng)產(chǎn)品的代碼不同

最近經(jīng)常聽到這樣一個(gè)問題:“到底測(cè)試到什么程度,才能上路?”
測(cè)試自動(dòng)駕駛的代碼與測(cè)試普通互聯(lián)網(wǎng)產(chǎn)品的代碼不同。互聯(lián)網(wǎng)產(chǎn)品的代碼只要達(dá)到了目標(biāo)功能,就可以發(fā)布。比如手機(jī)APP,只要用戶用起來沒有障礙,就是好代碼。
而無人車不同。代碼中存在的問題,不只是一個(gè)bug這么簡(jiǎn)單。代碼中的問題,只有一小部分是“known unknown”,也就是可以預(yù)料到的問題。大多數(shù)是“unknown unknown”,也就是無法預(yù)料的問題。問題如果不被及時(shí)發(fā)現(xiàn),帶到了路測(cè)上,就會(huì)對(duì)公共安全造成威脅。
理論上講,測(cè)試的環(huán)節(jié)越周密、越仔細(xì)越好。而現(xiàn)實(shí)中,我們往往沒有足夠的時(shí)間或資源去做所有的測(cè)試,或是測(cè)試所用的工具還不夠成熟。因此,工程師們往往要決定,在有限的條件下,應(yīng)該作何取舍。
其實(shí),測(cè)試代碼不過是為了兩個(gè)目標(biāo):
1. 找到潛在的問題。
2. 有效挖出問題的根源。
針對(duì)第一個(gè)目標(biāo),我們首先要看測(cè)試的各個(gè)級(jí)別是否覆蓋全面。自動(dòng)駕駛的測(cè)試多種多樣。首先,工程師要盡到自己份內(nèi)的測(cè)試職責(zé)。從最初的幾名工程師聚在一起做設(shè)計(jì)審核(design review),到基本的單元測(cè)試(unit test),再到部件測(cè)試(component-level test),工程師至少要保證自己寫的那幾行代碼不出問題。
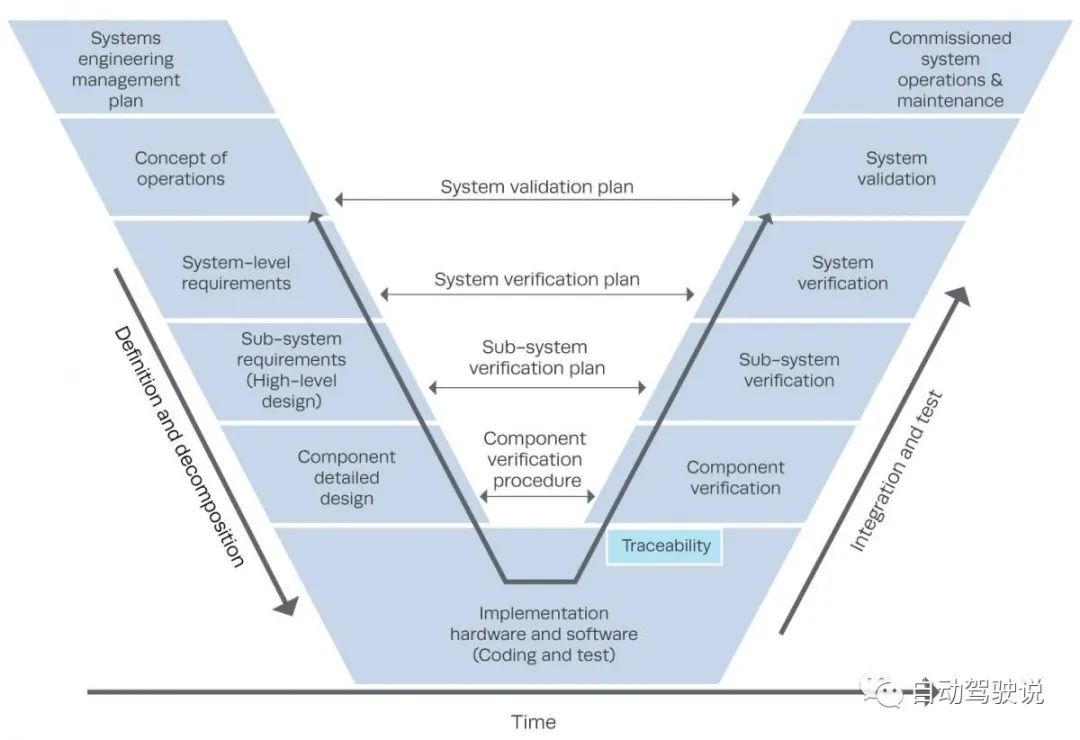
基礎(chǔ)的測(cè)試完成之后,下一步就是保證代碼與其他部件可以兼容。比如,做激光雷達(dá)模型的工程師要保證自己的代碼不會(huì)影響到其他傳感器。這時(shí)就需要把整個(gè)stack跑一遍,或是hardware in the loop,將其他硬件系統(tǒng)也一起測(cè)試,看看是否有兼容問題,做到“持續(xù)集成”(continuous integration)。具體方法可以參考V&V模型。
測(cè)試的方式也分為很多種,除了可以在本地跑代碼,自動(dòng)駕駛最重要的就是仿真。一個(gè)強(qiáng)大的仿真平臺(tái)可以在一定程度上代替路測(cè)。通過仿真技術(shù),不但可以對(duì)已有的駕駛數(shù)據(jù)(log)重演,也可以打造全新的場(chǎng)景,自己定義各項(xiàng)參數(shù)(parameter),從而讓有限的數(shù)據(jù)在短時(shí)間內(nèi)發(fā)揮其最大效用。
仿真測(cè)試之后,可以把代碼放在車上,在封閉環(huán)境里測(cè)試(closed course),最終才可以去開放道路上測(cè)試。
測(cè)試的途徑多種多樣,但總體上來講,越底層的測(cè)試,成本越低。如果等到上路測(cè)試才發(fā)現(xiàn)問題,那成本就很高了。
原因很簡(jiǎn)單:越底層的測(cè)試,越容易查出問題的根源。越是上層的測(cè)試,涉及的部分越廣,一旦找到問題,排查起來就很難。
因此,底層的測(cè)試設(shè)計(jì)尤為重要。一個(gè)測(cè)試對(duì)象可以是一個(gè)新開發(fā)的駕駛行為,也可以是對(duì)已有功能的改進(jìn)。如果是對(duì)已有功能的改進(jìn),就要將所有的細(xì)節(jié)量化為指標(biāo)(metrics),指標(biāo)一旦有變動(dòng),或是“退化”(regression),比如將騎自行車的人探測(cè)為行人,就要分析其原因。從而做到讓每一個(gè)潛在問題都“有根可循”。
如果是開發(fā)新的駕駛功能,就可以利用仿真平臺(tái)打造所需場(chǎng)景,預(yù)估有可能發(fā)生的問題,再針對(duì)每一個(gè)潛在的問題設(shè)計(jì)所對(duì)應(yīng)的指標(biāo),做到“防患于未然”。
-
代碼
+關(guān)注
關(guān)注
30文章
4967瀏覽量
73960 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
793文章
14879瀏覽量
179790
原文標(biāo)題:自動(dòng)駕駛代碼在上路前該如何測(cè)試?
文章出處:【微信號(hào):zidongjiashishuo,微信公眾號(hào):自動(dòng)駕駛說】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
零代碼ATE測(cè)試系統(tǒng),輕松完成LED電源模塊的自動(dòng)化測(cè)試

汽車自動(dòng)駕駛的太陽(yáng)光模擬應(yīng)用研究

自動(dòng)駕駛仿真測(cè)試有什么具體要求?

測(cè)試小白3分鐘上手,零代碼自動(dòng)化測(cè)試平臺(tái),15分鐘搭建自動(dòng)化測(cè)試方案

零代碼自動(dòng)化測(cè)試平臺(tái)ATECLOUD功能詳解

自動(dòng)駕駛測(cè)試有哪些要求規(guī)范?

小馬智行三城開啟全天候自動(dòng)駕駛測(cè)試
汽車智能座艙測(cè)試:如何筑牢安全與體驗(yàn)的雙重防線?

自動(dòng)駕駛技術(shù)測(cè)試有哪些?

自動(dòng)駕駛技術(shù)落地前為什么要先測(cè)試?
搭建完整的ADAS測(cè)試鏈路,推動(dòng)自動(dòng)駕駛技術(shù)的安全發(fā)展
蘿卜快跑在香港的自動(dòng)駕駛測(cè)試區(qū)域再擴(kuò)大
百度最新消息:蘿卜快跑在港自動(dòng)駕駛測(cè)試區(qū)再擴(kuò)大 百度智能云持續(xù)領(lǐng)跑中國(guó)大模型

新能源車軟件單元測(cè)試深度解析:自動(dòng)駕駛系統(tǒng)視角
助力dSPACE實(shí)現(xiàn)基于GNSS的駕駛功能的HIL仿真 ,加速自動(dòng)駕駛測(cè)試革命!




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論