 研究人員開發基于即興的聊天機器人
研究人員開發基于即興的聊天機器人

USC信息科學研究所(ISI)的研究負責人和USC維特比工程學院的計算機科學研究助理教授Jonathan May正在與ISI程序員分析師兼前途的USC Viterbi博士Justin Cho探討這個問題。學生,通過他們的精選對可學習即興創作(SPOLIN)項目。他們的研究將即興對話納入聊天機器人,以產生更具吸引力的互動。
SPOLIN研究資料庫由68,000多個英語對話對,或對對話做出迅速反應和隨后的回應所組成。這些對以“是”和“對話”為模型,這是即興創作的基本原則,鼓勵進行更多有基礎和相關的對話。收集數據后,Cho和May建造了SpolinBot,這是一個即席即用的代理程序,該程序使用第一個yes-and research集合編程,該集合足以訓練聊天機器人。
7月6日,在7月5日至10日舉行的計算語言協會會議上,發表了項目研究論文“即興對話與即興對話”。
梅正在他的工作中尋找新的研究思路。他對語言分析的熱愛使他從事自然語言處理(NLP)項目的工作,并且他開始尋找可以使用的更有趣的數據形式。
他說:“我在大學里做了一些即興創作,并一直呆在那些日子里。”“然后,一個在我大學即興表演團里的朋友建議,有一個‘是-’機器人可以和它一起練習,這很方便,這給了我靈感-制作一個可以即興創作,這很實用!”
May對這個想法的探索越深入,他發現這個想法就越有效。是-并且是即興創作的支柱,它促使參與者接受另一位參與者所說的現實(“是”),然后通過提供其他信息(“和”)在該現實之上建立。該技術是在互動中建立共同基礎的關鍵。如May所言,“是的,并且是即興社區所說的“接地”的方式。”
是的,并且很重要,因為它們可以幫助參與者共同建立一個現實。例如,在電影腳本中,可能有10-11%的行被視為是和,而在即興創作中,至少有25%的行被視為是。這是因為,與電影已經為觀眾確定的設置和角色不同,即興創作者的表演沒有場景,道具或任何客觀現實。
喬說:“由于即興表演場景幾乎沒有既定現實,所以在即興表演中進行對話會積極嘗試達成共同的假設和諒解。”“這使即興對話比大多數普通對話更有趣,后者通常是根據已經存在的許多假設(根據常識,視覺信號等)進行的。”
但是,找到從中提取即興對話的來源是一個挑戰。最初,May和Cho檢查了典型的對話集,例如電影劇本和字幕集,但這些消息來源所含的Yes-ands不夠多。而且,可能很難找到已記錄的,更不用說轉錄的即興創作了。
在2018年秋季以交換生的身份訪問南加州大學之前,Cho與May進行了接觸,詢問他可以參加的NLP研究項目。Cho來到USC之后,他了解了May的即興項目。
喬說:“我對它如何觸及我不熟悉的利基很感興趣,我特別感興趣的是,在這方面幾乎沒有或沒有以前的工作。”“當喬恩說我們的項目將回答一個尚未被問到的問題時,我感到很困惑:這個問題是如何通過“是和行動”即興進行建模的基礎如何有助于改善對話系統。”
Cho研究了多種收集即興數據的方法。他最終遇到了Spontaneanation,這是由多產演員和喜劇演員Paul F. Tompkins主持的即興播客,播客時間為2015年至2019年。
憑借其開放式專題節目,大約30分鐘的持續即興創作,高質量的錄音以及相當大的規模,Spontaneanation是為該項目挖掘是與否的理想來源。二人將其自發化數據輸入程序,SpolinBot誕生了。
梅解釋說:“該項目的一個很酷的部分是我們找到了一種即興使用的方法。”“自發化對我們來說是一個很好的資源,但是隨著數據集的發展,它是很小的;從中我們只能得到大約10,000個肯定的答案。但是,我們使用那些肯定的答案來構建一個分類器(程序),可以查看對話并確定它們是否為“是”。
首先,與即興對話進行合作有助于研究人員從其他來源中找到是和否,因為大多數SPOLIN數據都來自電影腳本和字幕。梅說:“最終,SPOLIN語料庫包含的yes和非即興來源的數量是即興創作的五倍,但我們只能從即興開始獲得這些yes。”
SpolinBot有一些控件可以優化其響應,使它們從安全無聊到有趣和古怪,還可以生成五個響應選項,用戶可以從中選擇以繼續對話。
這對二人為SpolinBot制定了許多計劃,并將其對話能力擴展到“是”之外。“我們想探索其他使即興創作變得有趣的因素,例如角色塑造,場景塑造,‘如果這(通常是一個有趣的異常)是真的,還有什么是真的?’和回叫(指的是對象) /上次對話中提到的事件),” Cho說。“我們還有很長的路要走,這讓我為我在整個博士學位期間以及以后所能探索的一切感到更加興奮。”
可能會與Cho的觀點相呼應。他說:“最終,我們希望建立一個良好的對話伙伴和良好的創造力伙伴。”他指出,即使是即興創作,是的,也只是對話的開始。“當今的機器人(包括SpolinBot)并不能很好地保持對話的進行。應該有一種感覺,兩個參與者不僅在建立一個現實,而且還在一起體驗這個現實。”
后一點很關鍵,因為正如梅所解釋的那樣,好的伙伴應該像Alexa和Siri一樣平等,不能屈服。他說:“我希望我的伴侶與我一起做出決定并集思廣益。”“我們最終應該能夠從人類長期合作中受益于團隊合作和合作中獲得收益。虛擬伙伴的另一個好處是,與我相比,數學水平更高,更快,并且實際上不需要吃飯! ”
-
聊天機器人
+關注
關注
0文章
348瀏覽量
13094 -
自然語言處理
+關注
關注
1文章
630瀏覽量
14674 -
nlp
+關注
關注
1文章
491瀏覽量
23282
發布評論請先 登錄
高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
如何在NVIDIA Isaac Lab中使用Newton訓練四足機器人

【EASY EAI Orin Nano開發板試用體驗】基于RKLLM大模型的聊天機器人
工業機器人的特點
輪式移動機器人電機驅動系統的研究與開發
小智 AI 聊天機器人 (XiaoZhi AI Chatbot)
明遠智睿SSD2351開發板:語音機器人領域的變革力量
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
借助NVIDIA技術提升機器人的移動和全身控制能力

【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
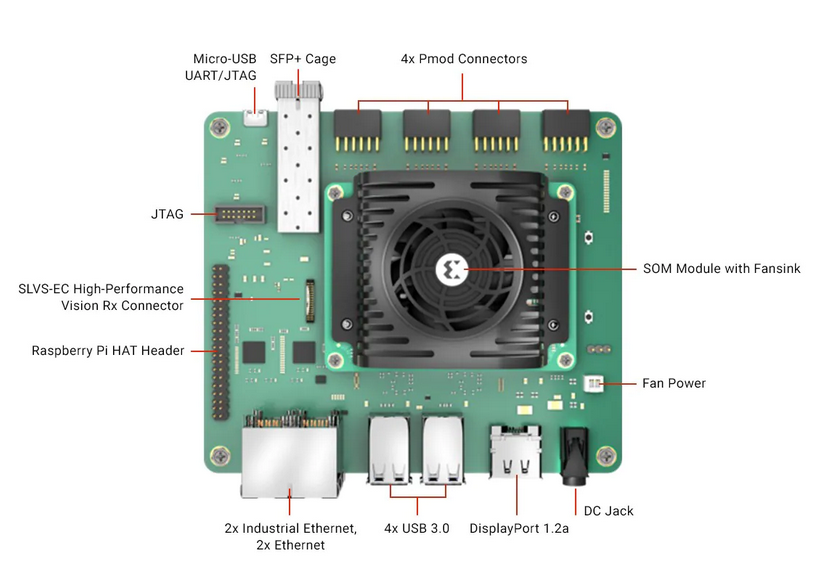
機器人開發套件 Kria KR260



 工商網監
工商網監
評論