") KUKA8.2系統(tǒng)下C4機器人虛擬外部軸E1的設置深層分析
KUKA8.2系統(tǒng)下C4機器人虛擬外部軸E1的設置深層分析

C 4 機器人大眾系統(tǒng)版本8.22 所使用配置 虛擬軸軟件SynchroMove(版本:1.2.9)
軟件中的數(shù)據(jù)庫包括:
壓鉚鉗 數(shù)據(jù)庫
電伺服焊鉗 數(shù)據(jù)庫
鉚接鉗 數(shù)據(jù)庫
氣伺服焊鉗 數(shù)據(jù)庫
SynchroMove軟件在 機器人D盤中的KUKA_OPT文件夾中。
1.與它相配合還要有相對應的USER用戶程序組建,只要是標準用戶程就行,不能和激光焊的標準組件混用。
2.必須是VW大眾標準體系下的標準機體機器人才能安裝成功,其它機體的機器人是不能安裝此軟件的.
3.必須安裝ProConOS軟PLC
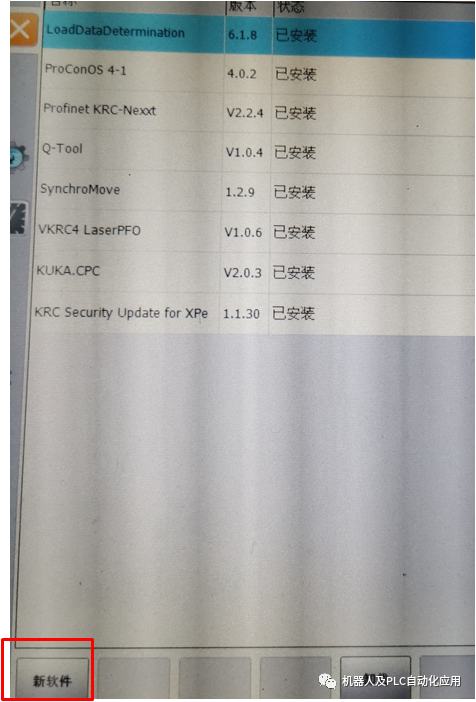
3.軟件安裝
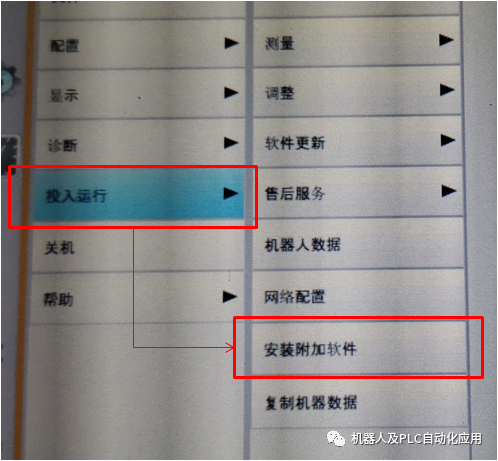
選擇 新軟件
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31075瀏覽量
222191 -
數(shù)據(jù)庫
+關注
關注
7文章
4019瀏覽量
68339 -
User
+關注
關注
1文章
27瀏覽量
11298
原文標題:KUKA8.2系統(tǒng)下C4機器人虛擬外部軸E1的設置深層分析
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
熱點推薦
深入解析Renesas E1/E20 Emulator:硬件設計與調(diào)試的全方位指南
工程師們提供了高效、精準的調(diào)試體驗。本文將深入探討E1/E20 Emulator的各個方面,包括其規(guī)格、系統(tǒng)設計、調(diào)試準備、調(diào)試功能以及使用注意事項等,希望能為電子工程師們在實際應用中提
Renesas E1/E20 仿真器:設計與調(diào)試的全方位指南
: R5F21322CNSP#W4.pdf 一、仿真器規(guī)格 1. 目標 MCU E1/E20 仿真器支持 R8C 家族的多個系列,如 R8
Renesas E1/E20仿真器:全面解析與應用指南
Renesas E1/E20 仿真器:全面解析與應用指南 引言 在嵌入式系統(tǒng)開發(fā)領域,仿真器是不可或缺的工具之一。Renesas的E1/E2
瑞薩E1/E20仿真器:設計、調(diào)試與使用全解析
瑞薩E1/E20仿真器:設計、調(diào)試與使用全解析 在嵌入式系統(tǒng)開發(fā)中,仿真器是不可或缺的工具,它能幫助工程師高效地進行硬件調(diào)試和程序開發(fā)。瑞薩的E1/
深入了解Renesas E1/E20 Emulator:從規(guī)范到應用
的調(diào)試工具,它能幫助工程師更高效地開發(fā)和調(diào)試基于R8C Family的MCU項目。本文將詳細介紹E1/E20 Emulator的規(guī)格、使用方法、調(diào)試功能以及使用時的注意事項,希望能對廣大電子工程師有所
Renesas E1/E20 仿真器:設計與調(diào)試全解析
Renesas E1/E20 仿真器:設計與調(diào)試全解析 在嵌入式系統(tǒng)開發(fā)的廣闊領域中,仿真器扮演著至關重要的角色,它是工程師們調(diào)試和優(yōu)化代碼的得力助手。Renesas E1/
探索RISC-V在機器人領域的潛力
應用,特別是機器人操作系統(tǒng)領域的可行性。MUSE Pi Pro以其強大的K1 AI CPU和官方對主流開源軟件棧的積極適配,成為了一個非常有吸引力的選擇。
二、 硬件初窺:性能小鋼炮
MUSE Pi Pro
發(fā)表于 12-03 14:40
高精度機器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運動控制方案
,MYD-LT536 具備以下突出優(yōu)勢:
1. 高算力與實時性兼顧
四核 Cortex-A55 架構可并行運行多線程控制任務,滿足多軸機器人同步控制與動態(tài)補償算法的實時計算需求;
T536 AMP多核
發(fā)表于 11-14 15:48
工業(yè)機器人的特點
機器人是關鍵。工業(yè)互聯(lián)網(wǎng)是通過端上的數(shù)據(jù)傳輸,經(jīng)過大數(shù)據(jù)分析和云計算處理,再進行智能化決策的一整個過程,其中端的數(shù)據(jù)傳輸是基礎。工業(yè)互聯(lián)網(wǎng)的端包括機器人、傳感器等一切線下連接端口。因此發(fā)展工業(yè)
發(fā)表于 07-26 11:22
輪式移動機器人電機驅(qū)動系統(tǒng)的研究與開發(fā)
【摘 要】以嵌入式運動控制體系為基礎,以移動機器人為研究對象,結合三輪結構輪式移動機器人,對二輪差速驅(qū)動轉向自主移動機器人運動學和動力學空間模型進行了分析和計算,研究和設計了自主移動
發(fā)表于 06-11 14:30
盤點#機器人開發(fā)平臺
地瓜機器人RDK X5開發(fā)套件地瓜機器人RDK X5開發(fā)套件產(chǎn)品介紹 旭日5芯片10TOPs算力-電子發(fā)燒友網(wǎng)機器人開發(fā)套件 Kria KR260機器人開發(fā)套件 Kria KR260-
發(fā)表于 05-13 15:02
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產(chǎn)品
大象機器人成立于2016年,專注協(xié)作機器人研發(fā)與應用,產(chǎn)品線涵蓋輕量級協(xié)作機器人、人形機器人、仿生機器人等多種形態(tài)。拳頭產(chǎn)品myCobot系
發(fā)表于 04-25 17:59
庫卡KUKA機器人常見故障維修
1、KUKA機器人伺服電機維修過熱原因 ①電源電壓過高; ②電源電壓過低,電機在額定負載下運行,電流過大使線圈發(fā)熱; ①修理和拆卸線圈時,熱拆卸方法不正確,會燒壞鐵芯; ①發(fā)動機過載或



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論