") KUKAC2機器人ESC的電器連接
KUKAC2機器人ESC的電器連接


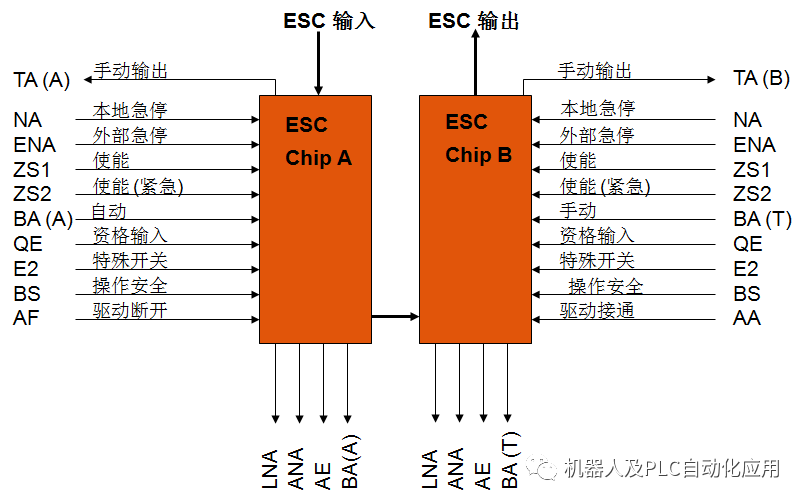
故障安全輸入
NA - 本地急停
ENA - 外部急停
ZS1 - 使能輸入
ZS2 - 使能, 緊急位置
BA - 操作方式 (手動/自動)
QE - 資格輸入 (裝載位置, 范圍限制)
BS - 操作安全輸入 (安全門)
控制器輸出
AA - 驅動接通
AF - 驅動斷開
故障安全輸出
AE - 驅動接通(驅動接觸器)
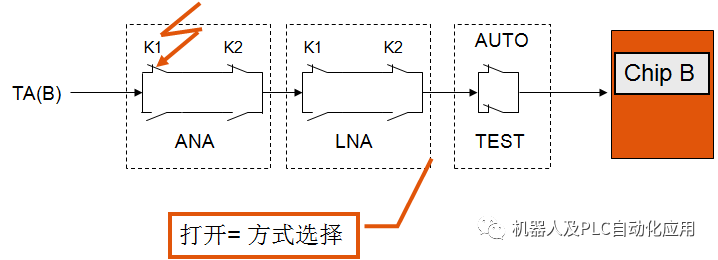
LNA - 外部急停
ANA -系統(tǒng)急停
BA - 操作方式 (手動/自動)
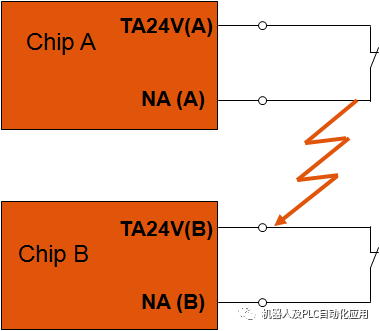
·輸入信號兩個通道的短路
·輸入信號的一個通道和電源短路
·通訊錯誤 (例如:安全總線中斷)
·硬件錯誤 (例如:檢測輸出繼電器觸點損壞)
·ESC 芯片損壞
ESC 節(jié)點結構
軟件和硬件安全功能
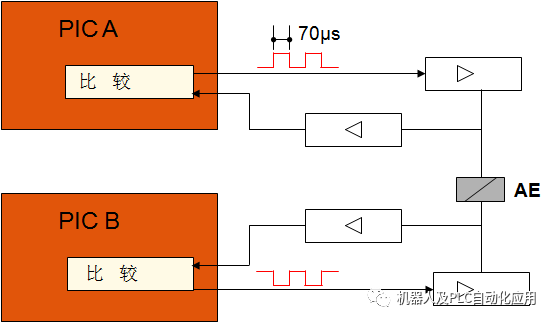
每個PIC發(fā)送一個脈沖給輸出并比較這個脈沖的返回信號
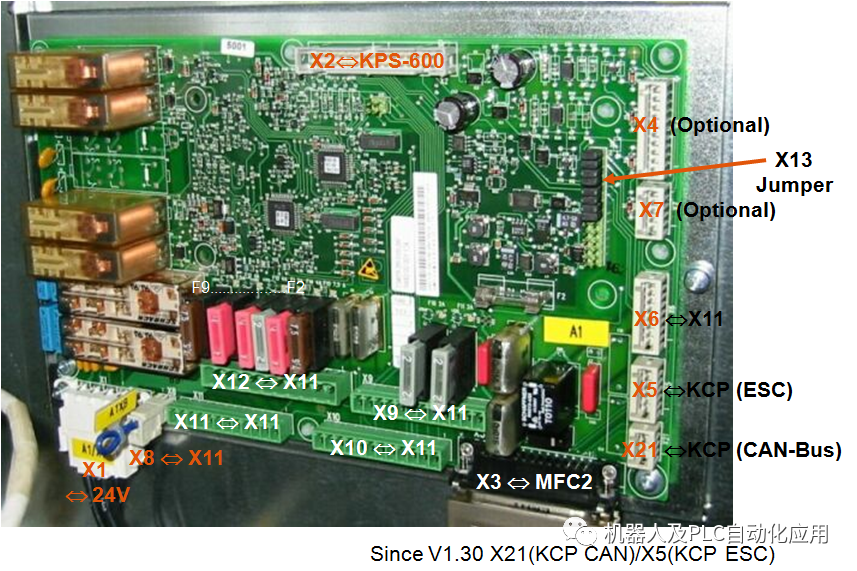
F10: Fks2A Vcc-Esc
F11: Fks2AVcc-Esc
F12: Fks4A 外圍接口 Vcc
F13: Fks4A 外圍接口 Vcc
F16: Fks7.5A 外圍接口 Vcc
F14: Fks4A 驅動接通
F15: Fks7.5A 驅動接通
F1: Fks2 A 驅動接通
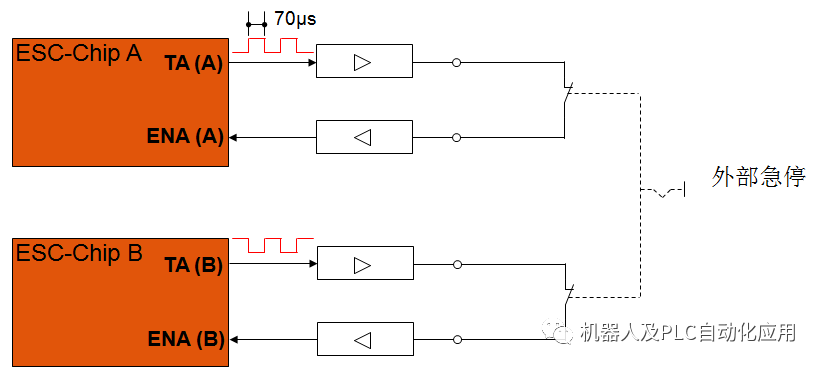
ESC-錯誤識別
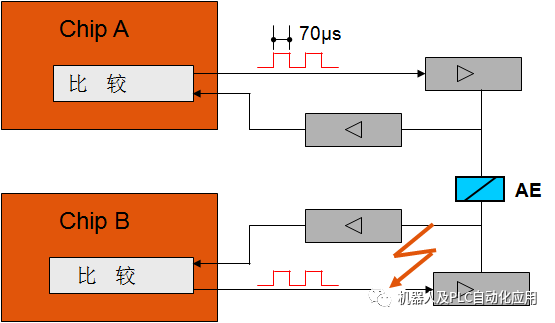
每個芯片傳一個脈沖給他的輸出,并且用這個樣本比較傳導的信號不一致的輸出定位安全狀態(tài).
AE LNA ANA
循環(huán)1 10 1
循環(huán)2 01 0
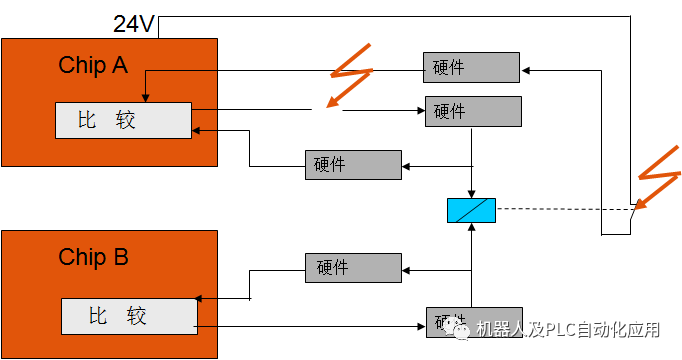
每個芯片比較輸出信號和返回信號.不一致的輸出定位安全狀態(tài).
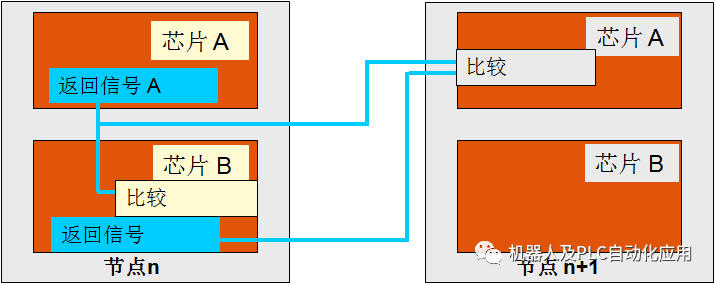
芯片 B 比較 A和 B 自己節(jié)點的文本文件
芯片 A 比較 A 和 B上一個節(jié)點的文本文件
不一致的輸出設為安全狀態(tài).
-
機器人
+關注
關注
213文章
31079瀏覽量
222291 -
驅動
+關注
關注
12文章
1956瀏覽量
88549 -
ESC
+關注
關注
0文章
63瀏覽量
18174
原文標題:KUKAC2機器人ESC(安全回路板)的電器連接
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
在 VisionFive 2 上實現(xiàn)機器人伺服控制
再談低溫燒結銀的應用:從春晚四家機器人出鏡的幕后推手說起
探索RISC-V在機器人領域的潛力
永貴電器與智元機器人達成深度戰(zhàn)略合作
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
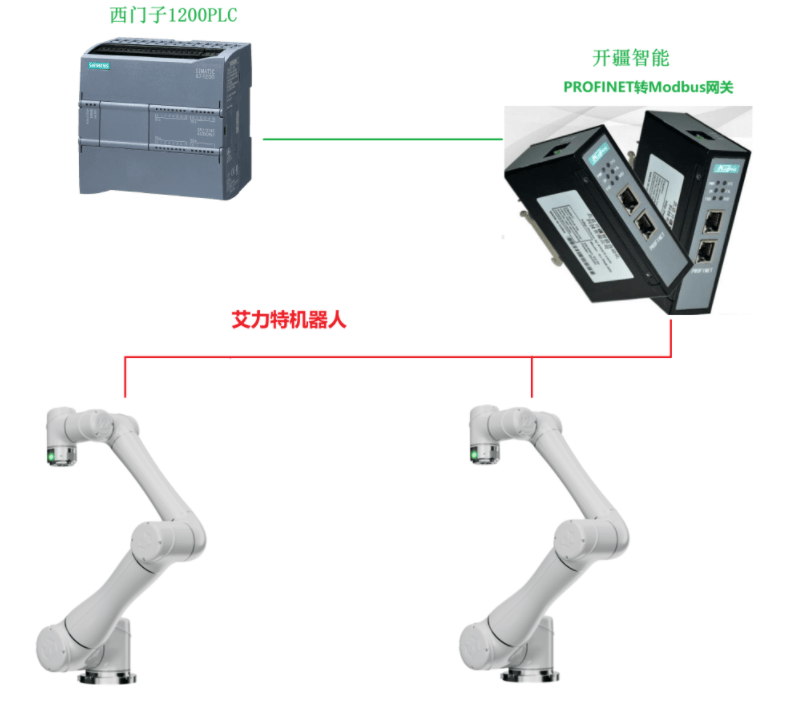
開疆智能Profinet轉ModbusTCP網(wǎng)關連接艾力特機器人配置案例
工業(yè)機器人的特點
明遠智睿SSD2351開發(fā)板:語音機器人領域的變革力量
盤點#機器人開發(fā)平臺
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】視覺實現(xiàn)的基礎算法的應用
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+ROS2應用案例
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+內容初識
揭秘Amass連接器:機器人企業(yè)爭相選擇的背后真相!




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論