") 機(jī)器人使用CMT焊接的標(biāo)準(zhǔn)控制應(yīng)用分析
機(jī)器人使用CMT焊接的標(biāo)準(zhǔn)控制應(yīng)用分析

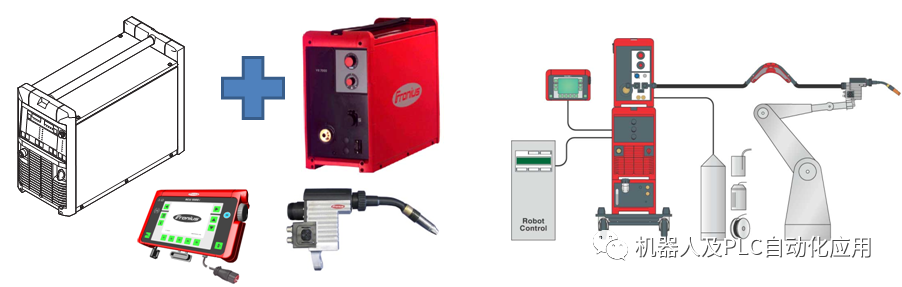
FroniusCMT是一種工作方式技術(shù):
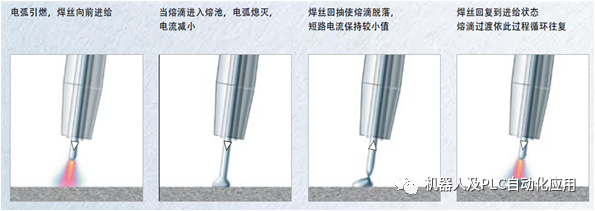
焊接開始,焊槍伺服電機(jī)驅(qū)動(dòng),焊絲與板材電弧引燃,焊絲融化融滴滴進(jìn)熔池,當(dāng)數(shù)字化的控制監(jiān)測(cè)到一個(gè)短路信號(hào),就會(huì)反饋給送絲機(jī),送絲機(jī)作出回應(yīng),迅速回抽焊絲,從而使得焊絲與熔滴分離。焊絲恢復(fù)到進(jìn)給狀態(tài)電弧再次引燃,循環(huán)往復(fù)到焊接結(jié)束,頻率由送絲速度決定。
CMTBraze+的焊槍頭較標(biāo)準(zhǔn)的CMT焊槍頭有很大變化
1 滅弧罩內(nèi)置水循環(huán)冷卻
優(yōu)點(diǎn):
使槍頭及時(shí)冷卻,可以長(zhǎng)時(shí)間進(jìn)行焊接;
降低了滅弧罩粘連飛濺,易于滅弧罩除塵
2 滅弧罩頭部形狀進(jìn)行改良
優(yōu)點(diǎn):
使保護(hù)氣體更加集中,節(jié)省氣體流量;
由于氣流集中,降低了飛濺量
CMTBraze+多用于表面件的焊接.
網(wǎng)上視頻:
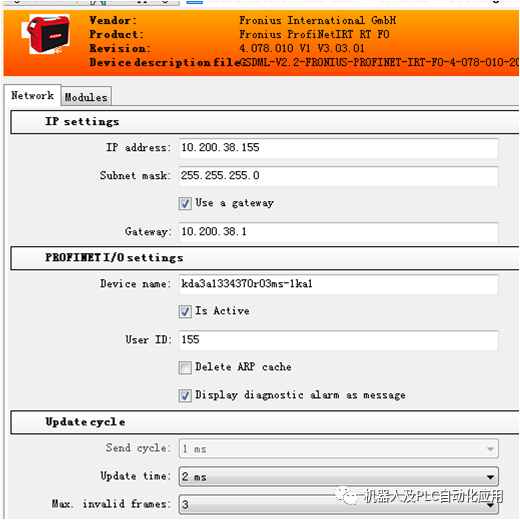
機(jī)器人組態(tài)Fronius焊機(jī)

CMT 中F里量的使用:
F549 用于與PLC的IO交換
IF $FLAG[F_m_MIG1] THEN -使用MIG-
MIT_MIG1=TRUE -使用MIG-
ELSE
MIT_MIG1=FALSE -不使用MIG-
ENDIF
IF MIT_MIG1 THEN
A1860 不帶CMT焊
$OUT[O_MS1_o_Proz]=$IN[I_MS1_o_Proz] OR $FLAG[F_o_Prozess]
E209不使用工具 或者 F525 不帶工具
A210維護(hù)警告
$OUT[O_MS1_W_akt]=$OUT[O_R_Auto] AND NOT $IN[I_MS1_W_akt]
A12 機(jī)器人自動(dòng),沒有E1865沒有維修警告
A212缺少冷卻水
$OUT[O_MS1_H2O_io]=$OUT[O_R_Auto] AND NOT $IN[I_MS1_H2O_io]
A12 機(jī)器人自動(dòng),沒有 E1870冷卻液i.O.
A213焊接氣故障
$OUT[O_MS1_Gas_io]=$OUT[O_R_Auto] AND NOT $IN[I_MS1_Gas_io]
A12 機(jī)器人自動(dòng),沒有E1869焊接氣體i.O.
A214無絲故障
$OUT[O_MS1_Draht_io]=$OUT[O_R_Auto] AND NOT $IN[I_MS1_Draht_io]
A12 機(jī)器人自動(dòng) ,沒有E1872有焊絲存在
A216總故障
$OUT[O_MS1_S_St]=$OUT[O_R_Auto] AND $COULD_START_MOTION AND (NOT $IN[I_MS1_S_St] OR $FLAG[F_MS1_Sammel]) AND $timer_flag[TimerNr_Ein]
A12機(jī)器人自動(dòng),程序正在執(zhí)行,沒有E1858沒有總故障,F573 CMT在運(yùn)行USER時(shí)超時(shí)或或者在運(yùn)行MAKRO時(shí)停止產(chǎn)生的超時(shí),T44 超時(shí)故障
F522 開啟節(jié)能模式
IF $FLAG[F_m_e_Mode] THEN F522
Mit_e_Mode=TRUE 使用節(jié)能功能
ELSE
Mit_e_Mode=FALSE
ENDIF
-----USER用戶程序用法-----------
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31080瀏覽量
222292 -
伺服電機(jī)
+關(guān)注
關(guān)注
88文章
2185瀏覽量
61290 -
焊接
+關(guān)注
關(guān)注
38文章
3563瀏覽量
63238
原文標(biāo)題:機(jī)器人使用CMT焊接的標(biāo)準(zhǔn)控制應(yīng)用分析
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
高精度機(jī)器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運(yùn)動(dòng)控制方案
RK3576機(jī)器人核心:三屏異顯+八路攝像頭,重塑機(jī)器人交互與感知
小蘿卜機(jī)器人的故事
機(jī)器人競(jìng)技幕后:磁傳感器芯片激活 “精準(zhǔn)感知力”
ADI解讀機(jī)器人控制系統(tǒng)中的安全風(fēng)險(xiǎn)和有效安全措施 為機(jī)器人技術(shù)的未來發(fā)展筑牢安全防線

海默RC系列機(jī)器人控制器

工業(yè)機(jī)器人線束揭秘 | 性能加持助力機(jī)器人作業(yè)效率穩(wěn)定躍升

工業(yè)機(jī)器人的特點(diǎn)
輪式移動(dòng)機(jī)器人電機(jī)驅(qū)動(dòng)系統(tǒng)的研究與開發(fā)
明遠(yuǎn)智睿SSD2351開發(fā)板:語音機(jī)器人領(lǐng)域的變革力量
盤點(diǎn)#機(jī)器人開發(fā)平臺(tái)
詳細(xì)介紹機(jī)場(chǎng)智能指路機(jī)器人的工作原理
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門的引路書
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】+內(nèi)容初識(shí)
EtherCAT科普系列(7): EtherCAT技術(shù)在工業(yè)機(jī)器人控制系統(tǒng)領(lǐng)域的應(yīng)用




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論