 8.3安全機器人---抱閘測試解析
8.3安全機器人---抱閘測試解析

每個機器人軸都有一個集成在電動機中的保持制動器。制動測試檢查低速和當前溫度下的每個制動器的制動扭矩是否足夠高。是否超過某個最小值。各個軸的最小值存儲在機床數據中。(制動測試不能確定制動扭矩的絕對值。)
如果制動測試處于活動狀態,則以下事件要求進行制動測試:
1.外部輸入$ BRAKETEST_REQ_EX,例如 B.來自PLC(外部請求)
2.機器人控制從冷啟動開始(內部要求)
3.制動測試周期時間已到期(內部請求)
循環時間為46小時。當驅動器控制了總共46個小時后,它就失效了。然后,機器人控制器請求進行制動測試并輸出以下消息:需要進行制動測試。機器人可以再移動2個小時。然后它停止,并且機器人控制器發出以下確認消息:未遵守制動測試請求的測試周期。確認后,機器人可以再移動2個小時。
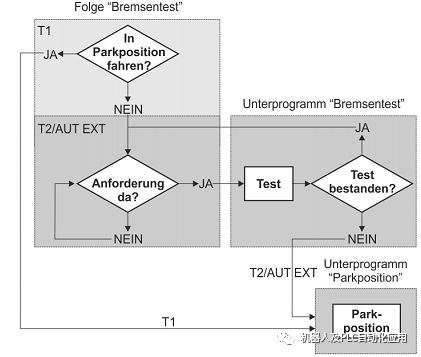
必須為制動測試創建以下程序。
1.遵循“剎車測試”
2.“制動測試”子程序
3.“停車位置”子程序
進行制動測試的前提條件是機器人處于工作溫度下。正常運行約1小時后就是這種情況。可以通過以下方式啟動制動測試:
自動控制
為此,在應用程序中包括“制動測試”序列,以便循環調用它。如果要求進行制動測試,程序將識別出該信息并開始進行制動測試。
手動控制
為此,請手動啟動“制動測試”序列。如果要求進行制動測試,程序將識別出該信息并開始進行制動測試。
制動測試的程序順序取決于運行模式:
1.如果在操作模式T1中啟動了“制動測試”序列,則可以直接行駛到停車位置。
2.無法在T1模式下啟動制動測試。如果要進行制動測試而不是行駛至停車位置,請切換至運行模式T2。
制動測試一個接一個地檢查所有制動器。
1.機器人加速到定義的速度。(速度不會受到用戶的影響。)
2.當機器人達到速度時,將應用制動,并且該制動過程的結果將顯示在消息窗口中。
3.如果已識別出制動器故障,則可以重復進行制動器測試,或者將機器人移至停車位置。
-
驅動器
+關注
關注
54文章
9083瀏覽量
155604 -
機器人
+關注
關注
213文章
31084瀏覽量
222321
原文標題:8.3安全機器人---抱閘測試解析
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
機器人用霍爾電流傳感器,能提升操作安全性么?

探索RISC-V在機器人領域的潛力
高性能人形機器人關節模組選型的關鍵技術要素

RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
揭秘工業 4.0 機器人:感知、安全和控制技術

ADI安全產品如何簡化不同機器人控制系統中安全機制的實現

工業機器人的特點
輪式移動機器人電機驅動系統的研究與開發
慧通測控的協作機器人有哪些測試項目?




 工商網監
工商網監
評論