 KUKA電伺服焊鉗測量原理分析
KUKA電伺服焊鉗測量原理分析

user測量程序:
Geometrie:
初始化
在以下情況下必須完成:
?啟動時
?每次更換電極后
使用在WorkVisual下的初始化力新上限下配置的力。
nachFraesen:
循環初始化
?循環初始化必須在瓶蓋銑削之后進行,使用在WorkVisual中在初始化力蓋下配置的力。

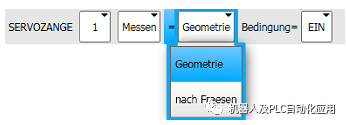
焊鉗測量USER程序:
P1 =選擇鉗子(鉗子編號)
P2 =技術選擇(測量)
P3 =方法-幾何/銑削后
P4 =條件-執行命令的條件
例如:
SERVOZANGE 1 Messen= nach Fraesen Bedingung=EIN 測量
VW_SGB_INIT_ADV(TRUE,#SG_PTP,P8,1,#SAME)
VW_SGB_INIT_MAIN(TRUE,#SG_PTP,P8,1,#SAME)
VW_SGB_INIT_MAIN(Condition:IN, MovementType :IN, PointCoord :IN,GunNumber :IN,InitType :IN)
Condition:TRUE條件
MovementType:SG_PTP運動類型
PointCoord:P8 工作點號
GunNumber:1 槍號
InitType: #SAME/#NEW 測量類型:#SAME銑削后測量,#NEW更換電極測量

1.SGL_CalcWear 測量損耗
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
伺服
+關注
關注
17文章
692瀏覽量
43368 -
測量
+關注
關注
10文章
5638瀏覽量
116739 -
KUKA
+關注
關注
3文章
218瀏覽量
17476
原文標題:KUKA電伺服焊鉗測量原理分析
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
伺服電機和伺服減速機如何配選的
伺服電機與伺服減速機的配選是工業自動化領域中的關鍵技術環節,直接影響設備的精度、效率和使用壽命。正確的配選需要綜合考慮負載特性、運動參數、安裝空間以及成本等因素。以下從工作原理、選型步驟、常見誤區及實際應用四個方面展開詳細分析。
伺服定位跑偏分析及解決方法
伺服系統在工業自動化領域扮演著核心角色,其定位精度直接影響生產效率和產品質量。然而在實際運行中,伺服定位跑偏問題頻發,成為困擾工程師的技術難題。本文將系統分析跑偏成因,并結合實際案例提出針對性解決方案,為設備維護和系統優化提供參
阻抗分析儀測量小阻抗的技巧
在現代電子工程中,對小阻抗(如毫歐級甚至微歐級)的精確測量是確保電源完整性、功率傳輸效率及高頻電路性能的關鍵。使用阻抗分析儀測量小阻抗時,微小的誤差源都可能顯著影響結果,因此必須采取系統化的優化策略。以下是提升小阻抗

電液伺服作動器為何標配磁致伸縮位移傳感器
電液伺服作動器標配磁致伸縮位移傳感器,以實現高精度閉環控制,具備非接觸、絕對位置反饋、抗干擾及耐惡劣環境等特性。
伺服基礎知識詳解
。 一、伺服系統的定義與分類 伺服(Servo)一詞源于拉丁語"servus"(奴隸),意指系統能像仆人一樣精確執行指令。伺服系統是"使物體的位置、方位、狀態等輸出被控量能夠跟隨輸入目標任意變化的自動控制系統"。主要分為三類:

電液伺服系統構造解析:從力矩馬達到液壓執行機構的精密控制鏈
電液伺服系統是現代工業控制領域的一項關鍵技術,它將電子控制的靈活性與液壓系統的高功率密度完美結合,形成了一種響應速度快、控制精度高的閉環控制系統。這類系統由電信號處理裝置和液壓動力機構組成,通過反饋


MT6825磁編芯片為伺服電機控制系統帶來全角度測量能力
在工業自動化、機器人技術以及新能源汽車等眾多領域,伺服電機控制系統都扮演著至關重要的角色。而測量電機的旋轉角度,對于實現精確的運動控制起著決定性作用。今天,我們就來深入探討一下MT6825磁編芯片如何為伺服電機控制系統帶來全角度
MT6825磁編芯片:為伺服電機控制系統注入全角度測量新活力
在當今工業自動化飛速發展的時代,伺服電機控制系統作為眾多設備的核心動力源,其性能的優劣直接影響著整個工業生產的效率和質量。而磁編芯片作為伺服電機控制系統中的關鍵組件,對于實現精確的角度測量和控制起著
電商API日志分析的實用工具
? 在當今數字化電商時代,API(應用程序編程接口)已成為平臺與外部系統交互的核心通道。電商API日志記錄了每一次請求的詳細信息,包括用戶行為、交易狀態、錯誤響應等。分析這些日志能幫助企業監控性能

是德頻譜分析儀對微波信號頻率穩定性的測量與分析
微波信號頻率穩定性在現代通信、雷達、電子對抗等領域至關重要。是德頻譜分析儀作為高精度的測量設備,能夠對微波信號的頻率穩定性進行準確測量與深入分析。以下是相關探討。

機床伺服電機的選型方法分析
純分享帖,需要者可點擊附件免費獲取完整資料~~~*附件:機床伺服電機的選型方法分析.pdf【免責聲明】本文系網絡轉載,版權歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權問題,請第一時間告知,刪除內容!
發表于 05-29 14:13
時間間隔測量分析儀特點總結
在時間頻率行業,時間間隔測量是不可缺少的一部分,選擇一款合適的時間間隔測量儀就會顯得尤為重要,今天我們來分析一下時間間隔分析儀的特點。 關鍵詞:時間間隔
伺服電機測試流程分析
伺服電機的測試流程是確保電機正常工作的關鍵步驟。以下是對伺服電機測試流程的詳細分析。 ?一、初步檢查與準備 1. 外觀檢查:首先,對伺服電機進行外觀檢查,確保電機完好無損,沒有明顯的物



 工商網監
工商網監
評論