 機器人主氣缸C50氣管連接說明
機器人主氣缸C50氣管連接說明

這次焊鉗的氣管接錯,沒有造成焊鉗故障報警,但是在焊鉗進行夾緊時出現卡頓現象。在作機器人E1軸移動時報拉拽故障。下面讓我們分析一下氣路。
伺服焊的第七軸(MQB)隨動:
機器人運動過程中焊槍可以定位速度可在5% 到100 %之間變化機器人監控運動過程。
(FESTO伺服焊鉗控制器)
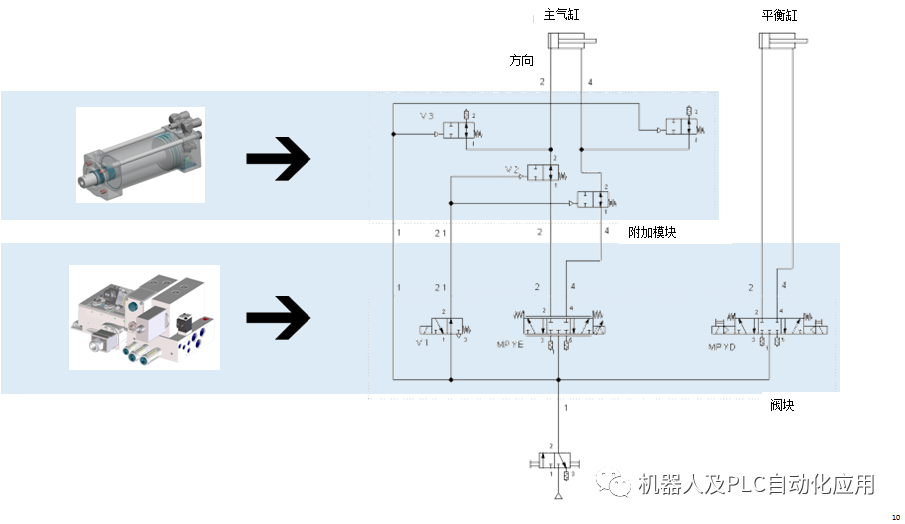
(氣伺服焊鉗氣路圖, 圖中的MSEB閥與實際工作原理相反)
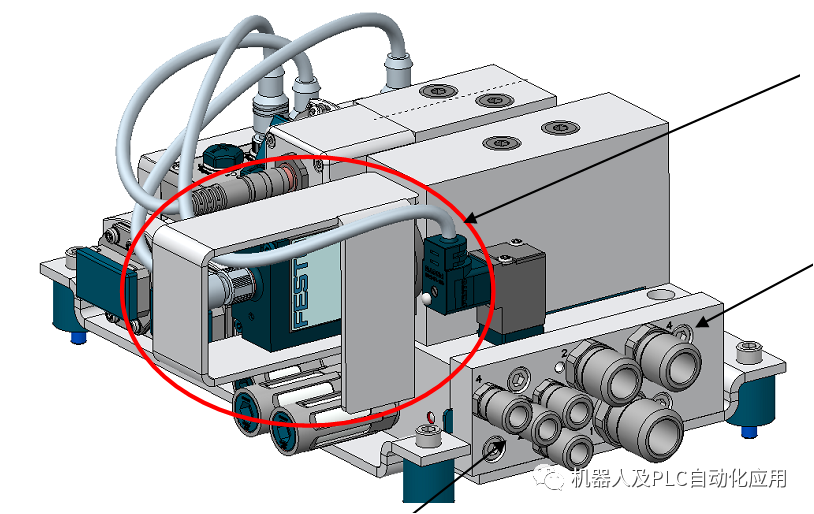
主氣缸(C50)氣管連接說明圖:
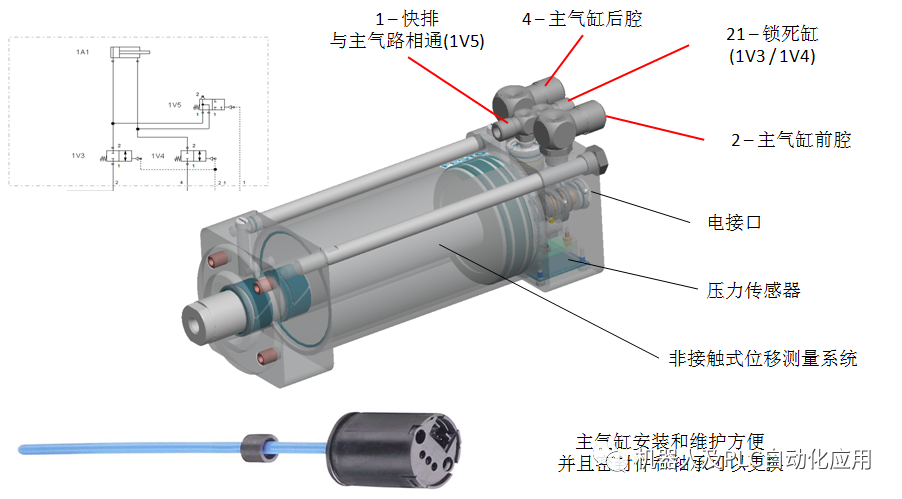
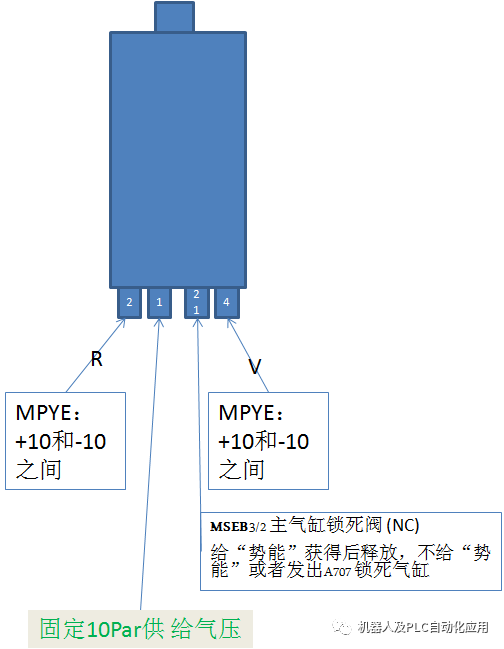
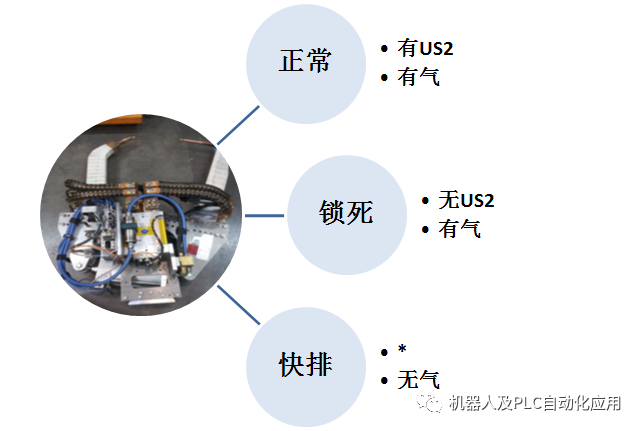
MSEB:控制鎖死閥,給主氣缸21的解鎖壓力不大
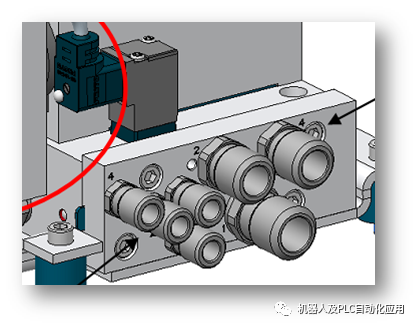
注意:閥座出氣口的標號1/21是接到主氣缸上的1/21的。
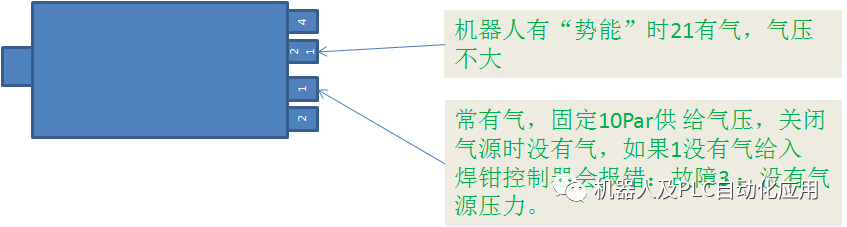
1.機器人有“勢能”時21有氣,氣壓不大(由MSEB閥控制)。
2.主氣缸1號管是常有氣,氣壓很大,為10PAR氣源的壓力。
故障3 :沒有氣源壓力。
主氣缸氣壓連續4秒內小于1bar(注意:氣源供給沒有監控)。如果兩邊氣腔內氣壓大于3bar,則該錯誤將自動消除。
沒有E705焊鉗準備就緒,E783壓力過低, E784普通故障。
1.檢查氣源供給。檢查氣管連接。
2.檢查主氣缸附加塊(隔斷閥)。
責任編輯:pj
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制器
+關注
關注
114文章
17791瀏覽量
193131 -
機器人
+關注
關注
213文章
31079瀏覽量
222217 -
監控
+關注
關注
6文章
2382瀏覽量
59423
發布評論請先 登錄
相關推薦
熱點推薦
在 VisionFive 2 上實現機器人伺服控制
到 VisionFive:
連接:
演示中使用的機器人平臺由兩個伺服組成,可以連接到0和1伺服控制板的端口。
連接完成后,需要按照以下說明
發表于 03-05 07:09
端側智聯:機器人主板架構革新與邊緣計算的協同進化
2025年至今,機器人行業正式邁入端側智能規模化落地期,2026年這一趨勢將持續深化,端側算力下沉將成為行業核心升級方向。機器人主板與邊緣計算深度協同成為主流解決方案,將核心算力與AI算法部署在
智能AI機器人定制開發_AI陪伴對話機器人主板方案
隨著人工智能技術的飛速發展,AI機器人逐漸滲透到家庭陪伴、教育科普、商業接待等多個領域。為了滿足多樣化的應用需求,AI機器人硬件架構需具備“高性能、低功耗、多形態、易落地”的特點。AI機器人采用聯發

從邊側到端側: 邊緣計算與機器人主板的融合創新
Jetson AGX Thor計算平臺,以2070 TFLOPS的算力實現7.5倍性能躍升,讓機器人感知、決策、執行全流程實時化成為現實。這兩大巨頭的技術動作指向同一核心——邊緣計算與機器人主板的深度融合,正從根本上重構機器人的
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
。· 利用開發板上的MIPI CSI1和CSI2接口,完整接入8路攝像頭,實現了所有通道的視頻預覽與采集,為機器人構建了全方位的視覺感知系統。卓越性能表現:· CPU占用率:34%· DDR占用率:50
發表于 10-29 16:41
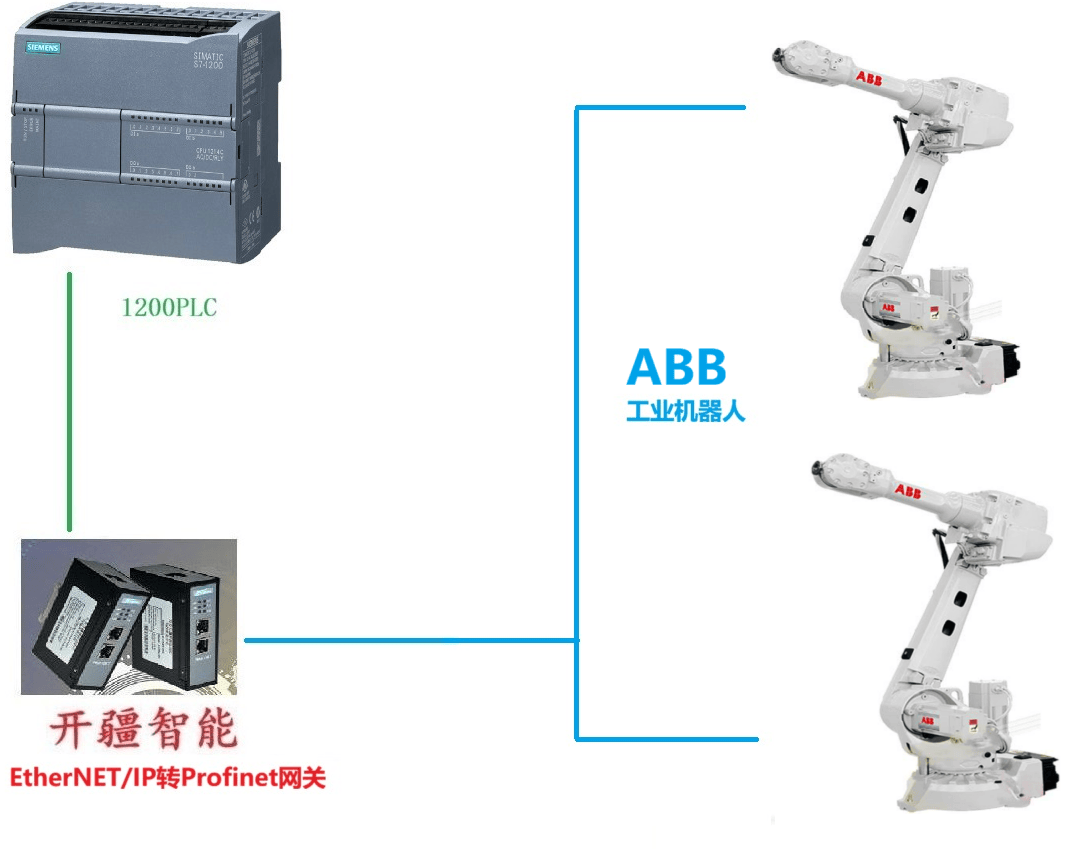
開疆智能Profinet轉ethernet網關連接ABB機器人主站配置案例
本案例是ABB機器人作為Ethernet/IP主站連接作為Ethernet從站的網關,并由網關將數據轉換成Profinet協議并被西門子PLC讀寫。
商用清潔機器人 “不掉鏈” 的秘訣:Amass LCB50 系列連接器來守護
在商場、寫字樓、機場等大型公共場所,商用清潔機器人早已成為高效保潔的“主力軍”。它們需在復雜路況下長時間連續作業,而設備能否穩定運行,關鍵就藏在負責電力與信號傳輸的連接器里。AmassLCB50

工業機器人的特點
機器人是關鍵。工業互聯網是通過端上的數據傳輸,經過大數據分析和云計算處理,再進行智能化決策的一整個過程,其中端的數據傳輸是基礎。工業互聯網的端包括機器人、傳感器等一切線下連接端口。因此發展工業
發表于 07-26 11:22
NC403(C50)高性能噪聲二極管現貨庫存
NC403(C50)高性能噪聲二極管現貨庫存NC403(C50)是Noisecom推出的一款高性能微波噪聲二極管,專為射頻和微波應用設計。NC403(C50)采用C50封裝,適用于需要
發表于 06-03 10:31
開疆智能Profient轉ModbusTCP網關連接ABB機器人MODBUS TCP通訊案例
。 配置過程: 1.MODBUS/TCP基于以太網,故ABB機器人在使用時需要有616-1PCINTERFACE選項。(在機器人主菜單中,選擇“系統信息”查看選項) 2.MODBUS/TCP通訊介質

機器人主軸選型攻略:Kasite三款必備主軸實力推薦
汽車制造、3C精密加工、航空航天等領域的優選方案。本文將系統解析Kasite機器人主軸的選型推薦策略。德國進口Kasite高速電主軸將主軸與機械手臂完美結合,為汽

盤點#機器人開發平臺
地瓜機器人RDK X5開發套件地瓜機器人RDK X5開發套件產品介紹 旭日5芯片10TOPs算力-電子發燒友網機器人開發套件 Kria KR260機器人開發套件 Kria KR260-
發表于 05-13 15:02
機器人主控芯片平臺有哪些 機器人主控芯片一文搞懂
AI芯片在人形機器人中的應用越來越廣泛。這些AI芯片專門設計用于執行人工智能算法,如深度學習、機器學習等。

安森美圖像傳感器在機器人領域的應用
目前,市面上的機器人主要分為兩類:固定式機器人與移動式機器人。固定式機器人固定于某個位置。而移動式機器人,包括自主移動



 工商網監
工商網監
評論