 庫卡機器人編程之BAS程序
庫卡機器人編程之BAS程序

更多內容請點擊上方安德魯機器人關注。 轉載請先后臺留言,請支持原創!謝謝
在庫卡機器人程序目錄下R1System下有一個程序名為BAS.SRC,該程序主要用來設置機器人運動相關參數數,比如坐標系、速度、加速度等等。
一.聯機表單
下面我們看看常用的聯機表單如何使用BAS程序:
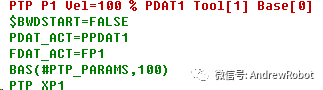
1.PTP運動:
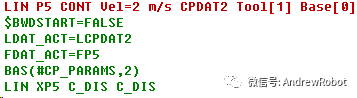
2.LIN直線運動:
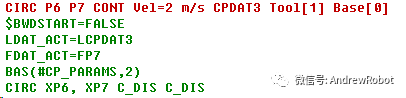
3.CIRC圓弧運動:
4.帶S指令,例如:SPTP
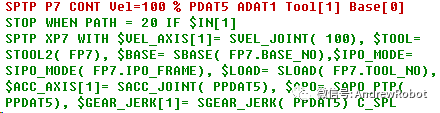
注意:帶S運動指令不會直接使用BAS的功能,但是會使用BAS文件里的其他帶S的程序,如SBASE,STOOL等等。具體的可以仔細閱讀BAS程序以及該文件下的其他子程序。
二.BAS程序代碼及說明
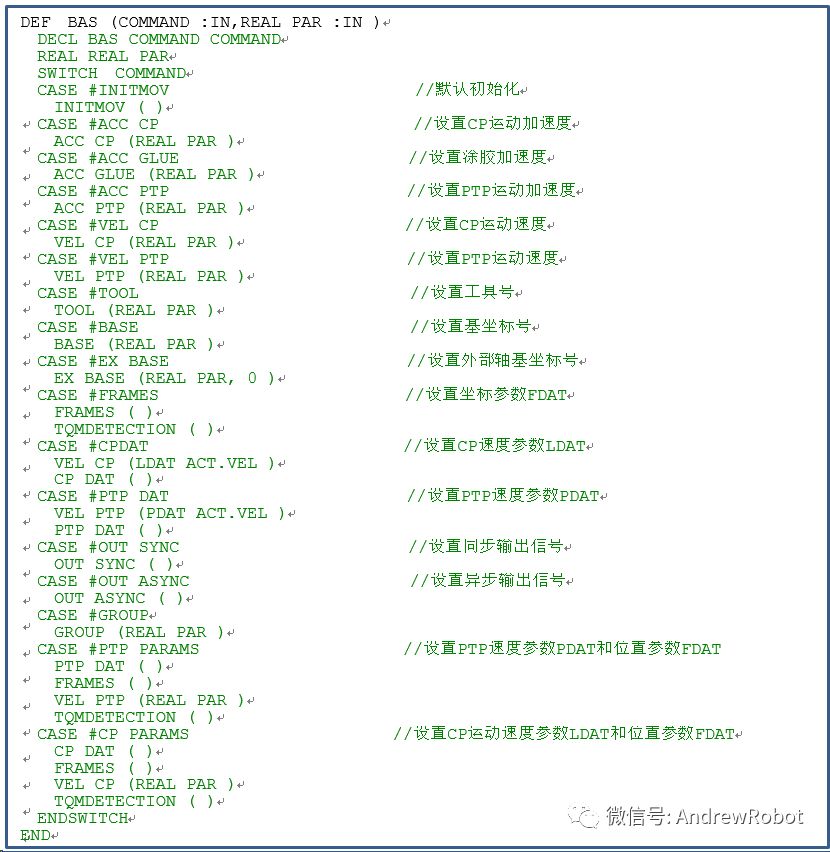
BAS程序代碼為:
DEF BAS (COMMAND :IN,REAL_PAR :IN );FOLD BAS () DECL BAS_COMMAND COMMAND REAL REAL_PAR SWITCH COMMAND CASE #INITMOV INITMOV ( ) CASE #ACC_CP ACC_CP (REAL_PAR ) CASE #ACC_GLUE ACC_GLUE (REAL_PAR ) CASE #ACC_PTP ACC_PTP (REAL_PAR ) CASE #VEL_CP VEL_CP (REAL_PAR ) CASE #VEL_PTP VEL_PTP (REAL_PAR ) CASE #TOOL TOOL (REAL_PAR ) CASE #BASE BASE (REAL_PAR ) CASE #EX_BASE EX_BASE (REAL_PAR, 0 ) CASE #FRAMES FRAMES ( ) TQMDETECTION ( ) CASE #CP_DAT VEL_CP (LDAT_ACT.VEL ) CP_DAT ( ) CASE #PTP_DAT VEL_PTP (PDAT_ACT.VEL ) PTP_DAT ( ) CASE #OUT_SYNC OUT_SYNC ( ) CASE #OUT_ASYNC OUT_ASYNC ( ) CASE #GROUP GROUP (REAL_PAR ) CASE #PTP_PARAMS PTP_DAT ( ) FRAMES ( ) VEL_PTP (REAL_PAR ) TQMDETECTION ( ) CASE #CP_PARAMS CP_DAT ( ) FRAMES ( ) VEL_CP (REAL_PAR ) TQMDETECTION ( ) ENDSWITCHEND;ENDFOLD BAS ()
其中:
三.運動參數:
| 問題 | 方案 | 關鍵字 |
| 機器人如何記住其位置? | 工具再空間中的相應位置會被保存.(機器人位置對應于所設定的工具坐標及基坐標) | POS TOOL BASE |
| 機器人如何知道它如何運動? | 通過指定運動方式:點到點,直線或圓弧 | PTP/SPTP LIN/SLIN CIRC/SCIRC SPL |
| 機器人運動的速度有多快? | 兩點之間的速度和加速度可以通過編程設定 |
VEL ACC |
| 機器人是否必須再每個點上都要停住? | 為了縮短節拍時間,點也可以軌跡逼近,但這樣就不會精確暫定. | CONT |
| 如果到達某個點,工具會沿哪個方向? | 可以針對每個運動對姿態引導進行單獨設置. | ORI_TYPE |
具體運動參數結構體:
| 結構體 | 元素 | 取值 | 說明 |
| PDAT | VEL | REAL型,取值:0-100 | PTP運動的速度 |
| ACC | REAL型,取值:0-100 | PTP運動的加速度 | |
| APO_DIST | REAL型,取值:0-100 | PTP運動的逼近參數 | |
| APO_MODE | ENUM:#CPTP,#CDIS | PTP運動逼近的方式 | |
| GEARJERK | REAL型,取值:0-100 | PTP運動的加加速度 | |
| LDAT | VEL | REAL型,取值:0-2.0 | CP運動的速度 |
| ACC | REAL型,取值:0-100 | CP運動的加速度 | |
| APO_DIST | REAL型 | CP運動的逼近參數 | |
| APO_FAC | REAL型,取值:0-100 | CP運動的逼近參數比值 | |
| AXIS_VEL | REAL型,取值:0-100 | CP運動軸旋轉速度 | |
| AXIS_ACC | REAL型,取值:0-100 | CP運動軸旋轉加速度 | |
| ORI_TYP | ENUM:#VAR,#CONSTANT,#JOINT | CP運動TCP姿態引導 | |
| CIRC_TYP | ENUM:#BASE,#PATH | 圓弧姿態引導 | |
| JERK_FAC | REAL型:0-100,默認:50 | CP運動的加加速度比例 | |
| GEAR_JERK | REAL型:0-100,默認:50 | CP運動的加加速度 | |
| EXAX_IGN | 默認值:0 | 忽略外部軸位置示教 | |
| CB | 結構體 | 圓弧運動的參數 | |
| FDAT | TOOL_NO | INT型:0-16 | 坐標系參數之工具坐標系 |
| BASE_NO | INT型:0-32 | 坐標系參數之基坐標系 | |
| IPO_FRAME | ENUM:#NONE,#TCP,#BASE | 坐標系參數之插補方式 | |
| POINT2[] | CHAR: | 點名,可以不填 | |
| TQ_STATE | BOOL:TRUE/FALSE | 扭矩監控開啟或關閉 |
——————————————
-
機器人
+關注
關注
213文章
31073瀏覽量
222162 -
編程
+關注
關注
90文章
3716瀏覽量
97178
原文標題:庫卡機器人編程之BAS程序
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
疆鴻智能EtherCAT牽手DeviceNet庫卡機器人:汽車玻璃產線的無界對話

RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
節卡機器人將攜具身智能成果亮相2025世界機器人大會 面向真實場景多點落地





 工商網監
工商網監
評論