 PID原理與參數調試
PID原理與參數調試

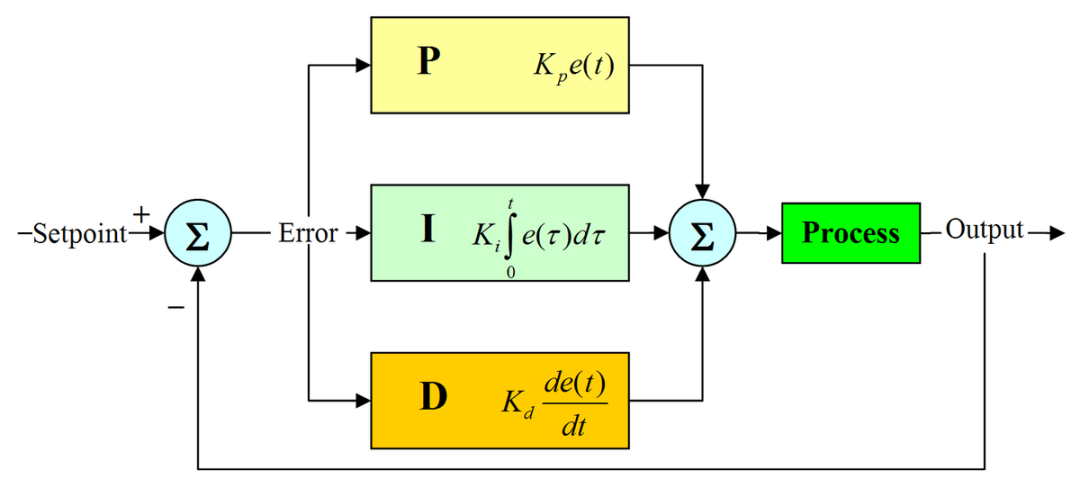
PID控制器(比例-積分-微分控制器),由比例單元(P)、積分單元(I)和微分單元(D)組成。
可以通過調整這三個單元的增益Kp,Ki和Kd來調定其特性,PID控制器主要適用于基本上線性,且動態特性不隨時間變化的系統。
之前簡單寫過一篇關于PID的文章:重溫經典PID算法
一、基礎理論
PID是以它的三種糾正算法而命名。受控變數是三種算法(比例、積分、微分)相加后的結果,即為其輸出,其輸入為誤差值(設定值減去測量值后的結果)或是由誤差值衍生的信號。若定義 {displaystyle u(t)} u(t)為控制輸出,PID算法可以用下式表示:

其中
Kp:比例增益,是調適參數
Ki:積分增益,也是調適參數
Kd:微分增益,也是調適參數
e:誤差=設定值(SP)- 回授值(PV)
t:目前時間
1.比例控件
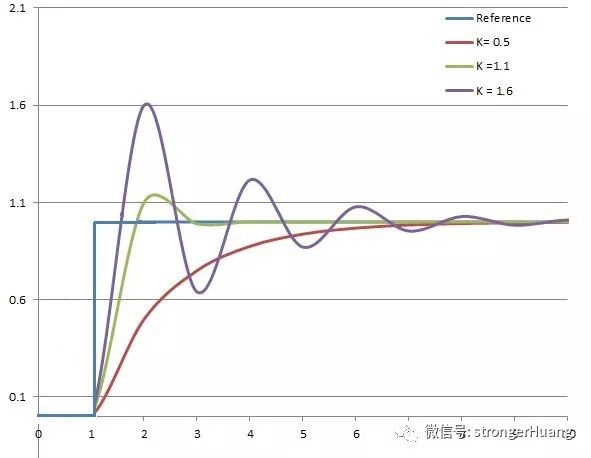
比例控制考慮當前誤差,誤差值和一個正值的常數Kp(表示比例)相乘。
如下圖,不同比例增益Kp下,受控變數對時間的變化(Ki和Kd維持定值):
2.積分控件
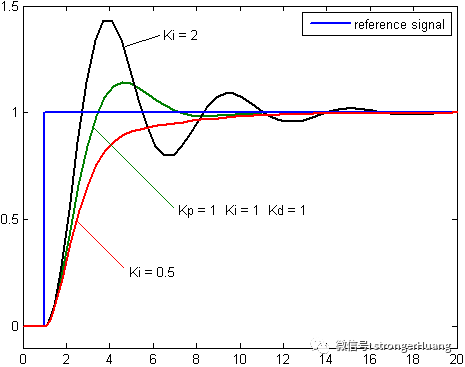
積分控制考慮過去誤差,將誤差值過去一段時間和(誤差和)乘以一個正值的常數Ki。
如下圖,不同積分增益Ki下,受控變數對時間的變化(Kp和Kd維持定值):
3.微分控件
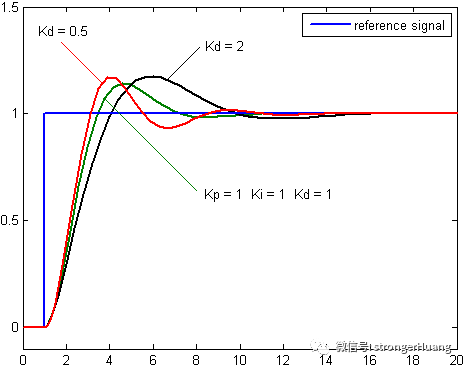
微分控制考慮將來誤差,計算誤差的一階導,并和一個正值的常數Kd相乘。
如下圖,不同微分增益Kd下,受控變數對時間的變化(Kp和Ki維持定值):
二、參數調試
PID的參數調試是指通過調整控制參數(比例增益、積分增益/時間、微分增益/時間)讓系統達到最佳的控制效果。
穩定性(不會有發散性的震蕩)是首要條件,此外,不同系統有不同的行為,不同的應用其需求也不同,而且這些需求還可能會互相沖突。
PID只有三個參數,在原理上容易說明,但PID參數調試是一個困難的工作,因為要符合一些特別的判據,而且PID控制有其限制存在。歷史上有許多不同的PID參數調試方式,包括齊格勒-尼科爾斯方法等,其中也有一些已申請專利。
1.穩定性若PID控制器的參數未挑選妥當,其控制器輸出可能是不穩定的,也就是其輸出發散,過程中可能有震蕩,也可能沒有震蕩,且其輸出只受飽和或是機械損壞等原因所限制。不穩定一般是因為過大增益造成,特別是針對延遲時間很長的系統。 2.最佳性能PID控制器的最佳性能可能和針對過程變化或是設定值變化有關,也會隨應用而不同。
兩個基本的需求是調整能力(regulation,干擾拒絕,使系統維持在設定值)及命令追隨 (設定值變化下,控制器輸出追隨設定值的反應速度)。有關命令追隨的一些判據包括有上升時間及整定時間。有些應用可能因為安全考量,不允許輸出超過設定值,也有些應用要求在到達設定值過程中的能量可以最小化。
3.各調試方法對比

4.調整PID參數對系統的影響
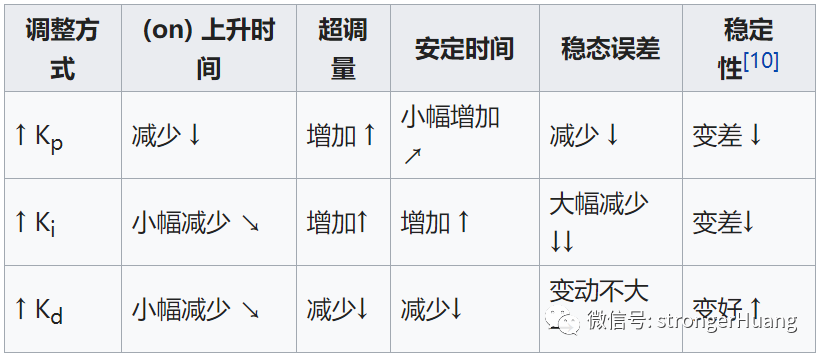
-
PID算法
+關注
關注
2文章
172瀏覽量
25832 -
PID
+關注
關注
38文章
1504瀏覽量
91814 -
微分
+關注
關注
0文章
31瀏覽量
14430
發布評論請先 登錄
高低溫試驗臺PID參數自整定技術:如何實現無超調控溫?

運動控制伺服閉環PID參數調整的誤區

云臺電機驅動系統載波參數配置與調試
變頻器內置PID控制參數的含義

變頻器PID參數設置步驟

變頻器使用過程中的參數調試
變頻器pid怎么啟用

PID控制的算法
C語言的PID算法
C語言增量式PID的通用算法
三菱伺服接線參數更改調試經驗分享
請問如何優化PID控制器的參數以實現快速響應和減少超調?
怎樣理解變頻器內置PID控制參數的含義
常用伺服參數的調整

一步到位,Moku數字PID控制器實現系統實時調節與驗證




 工商網監
工商網監
評論