 人體感應和雷達感應的區別
人體感應和雷達感應的區別

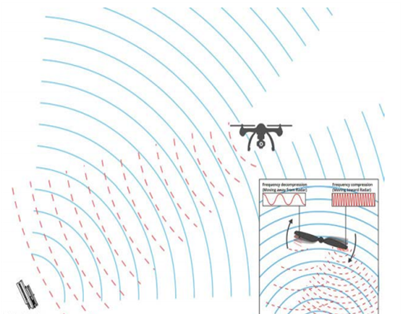
雷達感應:采用多普勒雷達感應原理,通過發射5.8GHz的雷達信號,一旦有移動物體進入感應范圍,則會改變雷達信號波形,從而觸發雷達感應器動作;不受環境溫度及聲音響度影響,是最選進最人性化的感應技術;
人體感應:采用熱釋電紅外感應原理,通過收集紅外能量變化觸發感應器動作,受環境溫度影響,當夏天環境溫度接近人體體溫時,人進入感應范圍無紅外能量變化,所以夏天人體感應表現非常不靈敏。
雷達感應和人體紅外感應技術皆常用于自動門、感應照明燈等自動控制場合,但這兩種感應控制技術的工作原理不一樣,使用時還是有一些區別的。
1、雷達感應的工作原理
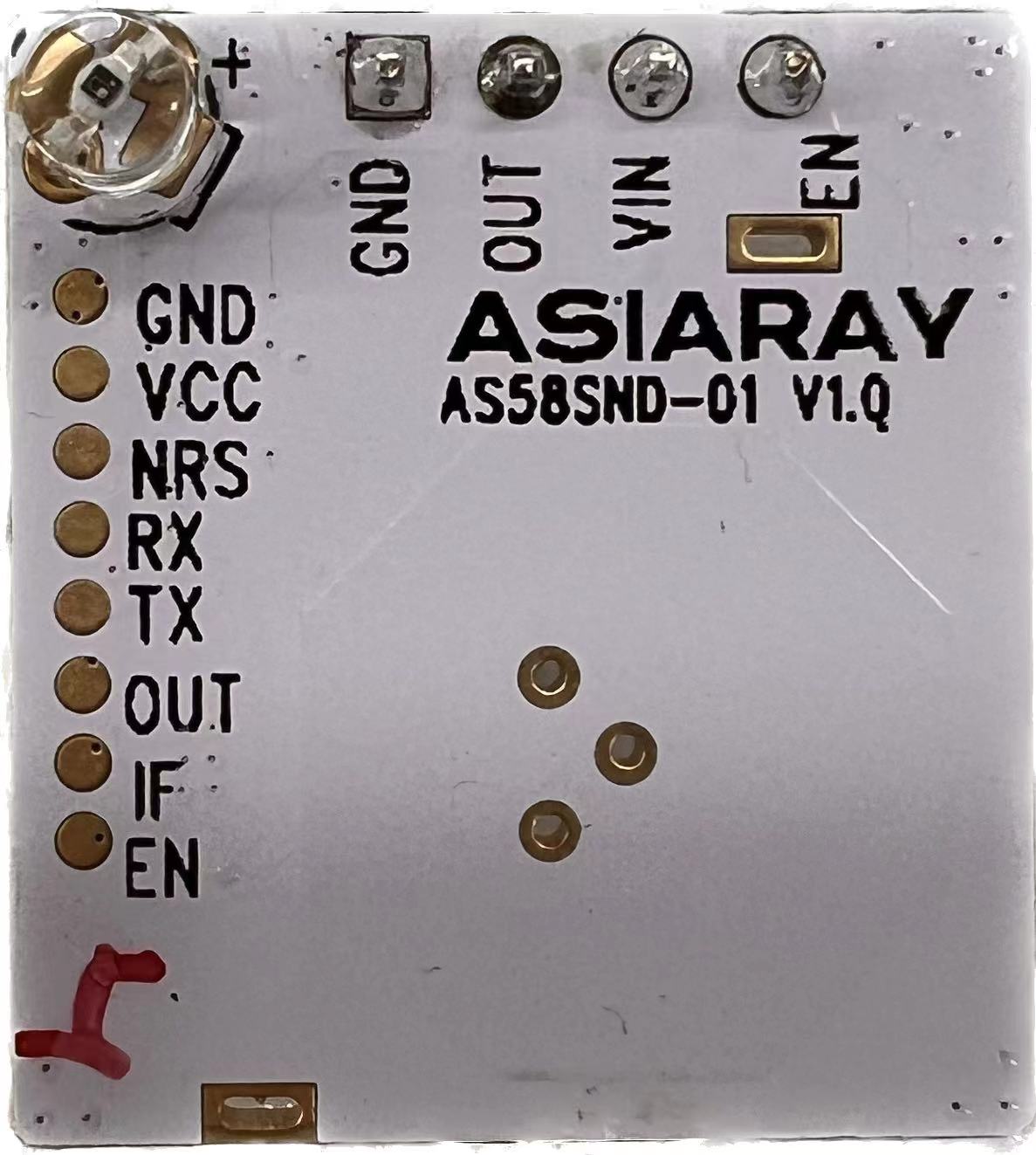
▲ 雷達感應模塊。
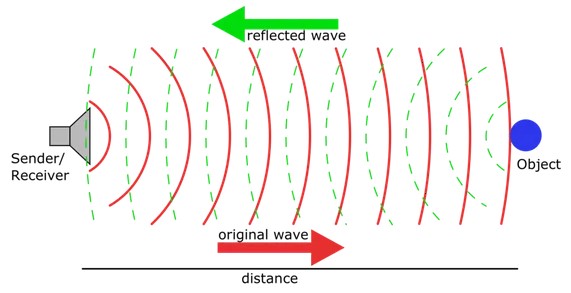
上圖所示的模塊是一款雷達感應模塊,其由微波振蕩器、放大整形及檢測電路構成。工作時,微波振蕩器通過印制在PCB板上的天線向外發射超高頻(GHz級)電磁波,根據微波多普勒原理,若雷達模塊周圍有移動的物體,其天線便會接收到移動物體反射回來的電磁波,而這個反射回來的電磁波的頻率與模塊向外發射的電磁波的頻率有一定的頻率差,這個頻率差被接收電路放大、整形等處理后,即可輸出一個控制信號去控制負載的工作。
2、人體感應的工作原理
▲ 紅外人體感應模塊。
上圖為一個人體感應模塊。其由菲涅爾透鏡、熱釋電傳感器及感應信號處理電路構成。由于這種模塊用的熱釋電傳感器前面加有紅外濾光片,故其只能檢測人體發出的波長為十幾μm的紅外信號,模塊配的菲涅爾透鏡用以提高靈敏度。這種模塊工作時,只要熱釋電傳感器監測區域內有人走動,傳感器便會輸出相應的電信號,該信號經感應信號處理電路處理后輸出一個控制信號去控制負載的工作。
上述兩種感應模塊皆可用于感應燈、自動門的控制。使用微波感應模塊控制的優點是無方向性,只要有人或其它物體在模塊的監測區域內移動,即可實現控制,其缺點是模塊的耗電較大(工作電流在mA級),并且這種雷達感應模塊價格要比熱釋電人體感應模塊貴好幾倍。人體感應模塊的優點是價格低廉、待機耗電小(一些電路設計合理的模塊,靜態耗電可低至100μA以內),可以使用電池供電,缺點是使用有方向性,只有在傳感器的前方有人移動,才能實現控制。
-
人體感應
+關注
關注
3文章
69瀏覽量
17513
發布評論請先 登錄
微波雷達感應模塊,人體存在感應雷達模組,雷達傳感器技術應用
物聯網設備感應技術,微波雷達傳感器應用,雷達存在感應模塊
5.8G雷達存在感應模塊,微波雷達智能感應燈應用,多普勒雷達技術
衛生間智能馬桶雷達感應方案,人體存在感應雷達模組應用
毫米波雷達模組,智能家居雷達感應技術,存在感應雷達方案
微波雷達模組應用 人體靜止存在感應雷達
雷達感應人體存在,雷達感應原理
人體存在感應雷達應用,你知道多少?
雷達人體感應的優勢,你知道哪些?




 工商網監
工商網監
評論