 dfrobotURM07-UART低功耗超聲波測距模塊簡介
dfrobotURM07-UART低功耗超聲波測距模塊簡介







簡介
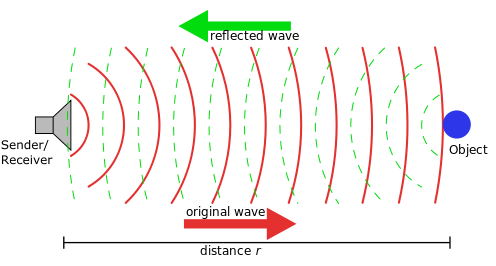
超聲波測距是通過發射超聲波,并計算傳感器收到回聲的時間差,從而得出傳感器到目標物體距離的一種方法。
URM07是一款超低功耗的超聲波測距模塊,有效測量距離7.5米,支持3.0~5.5V寬電壓供電,可直接兼容3.3V或者5V控制設備,例如Arduino,樹莓派等。URM07平均工作電流僅5mA,待機電流僅14uA,絕大部分控制器IO端口便可以為單個或多個URM07模塊提供工作電流。
從超聲波測距的原理來看,距離的準確性會受到空氣的溫度和風向干擾,URM07內置溫度傳感器,可以讀取周邊環境溫度,并自動補償數據。傳感器采用收發一體的超聲波探頭,探測夾角約為60°,外形小巧,質量輕盈。預留2.54間距-4P接口,采用UART通信方式,能夠適應更多系統架構的二次開發與應用。

URM07超聲波夾角
URM07-UART超聲波傳感器各項參數都經過我們長時間嚴格的實驗測定和優化,具有一流的測距響應速度、穩定性、靈敏度及低功耗。如果您的產品或設計對超聲波傳感器性能有著近乎苛刻的要求,那么URM07絕對是您的最佳選擇。

Arduino URM07 UART 級聯示意圖
特性
極其精簡的設計
極輕的重量
極高的測量穩定性
極高的測量靈敏度
內置溫度補償
極低的電流消耗
電源防反接保護(短暫保護)
接口過電壓保護
便捷的安裝及使用方式
技術規格
工作電壓:3.0~5.5 VDC
IO工作模式: 開漏(OD),內置上拉電阻
有效量程:20~750 cm
方向角:60°
待機電流:<14 uA(主要由電源芯片消耗,核心電路消耗<1uA)
測距峰值電流:<9 mA
測距平均電流:<5 mA(連續測量下測得,僅供參考)
距離分辨率:1 cm
測距誤差:1%
工作溫度范圍:-10~70℃
溫度誤差:±1℃
工作濕度范圍:RH<75%
聲學頻率: 38~42KHz
開機啟動時間:<20ms
測量周期: <60ms
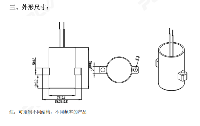
尺寸:27mm*27mm
重量:約4.2g(不含排針)
-
嵌入式主板
+關注
關注
7文章
6107瀏覽量
37078 -
DFRobot
+關注
關注
4文章
1164瀏覽量
12417
發布評論請先 登錄
CW32L012/F030靈眸X1智能小車——超聲波模塊配置
TDK ICU - 20201長距離超聲波飛行時間測距傳感器深度解析
ICU-30201:超遠距離超聲波飛行時間測距傳感器的卓越之選
什么是超聲波原理的液位傳感器?

無線超聲波測距傳感器:精準感知,開啟智能測距新時代
【Milk-V Duo S 開發板免費體驗】DuoS 超聲波測距 OLED 顯示
超聲波測距換能器:工業與生活中的測量利器
超聲波測距換能器:工業與生活中的測量利器
超聲波清洗機是什么,它如何通過超聲波振動來清洗物品?

超聲波換能器:原理與多領域應用解析
一文讀懂超聲波換能器:原理、應用與未來趨勢
超聲波換能器--聲波世界的 “神奇魔法師”
超聲波清洗的原理是什么?超聲波清洗是如何起作用的?

超聲波頻率和功率對在線式超聲波清洗的影響如何?




 工商網監
工商網監
評論