") dfrobotDSS-P05機(jī)器人專用舵機(jī)介紹
dfrobotDSS-P05機(jī)器人專用舵機(jī)介紹

產(chǎn)品簡介
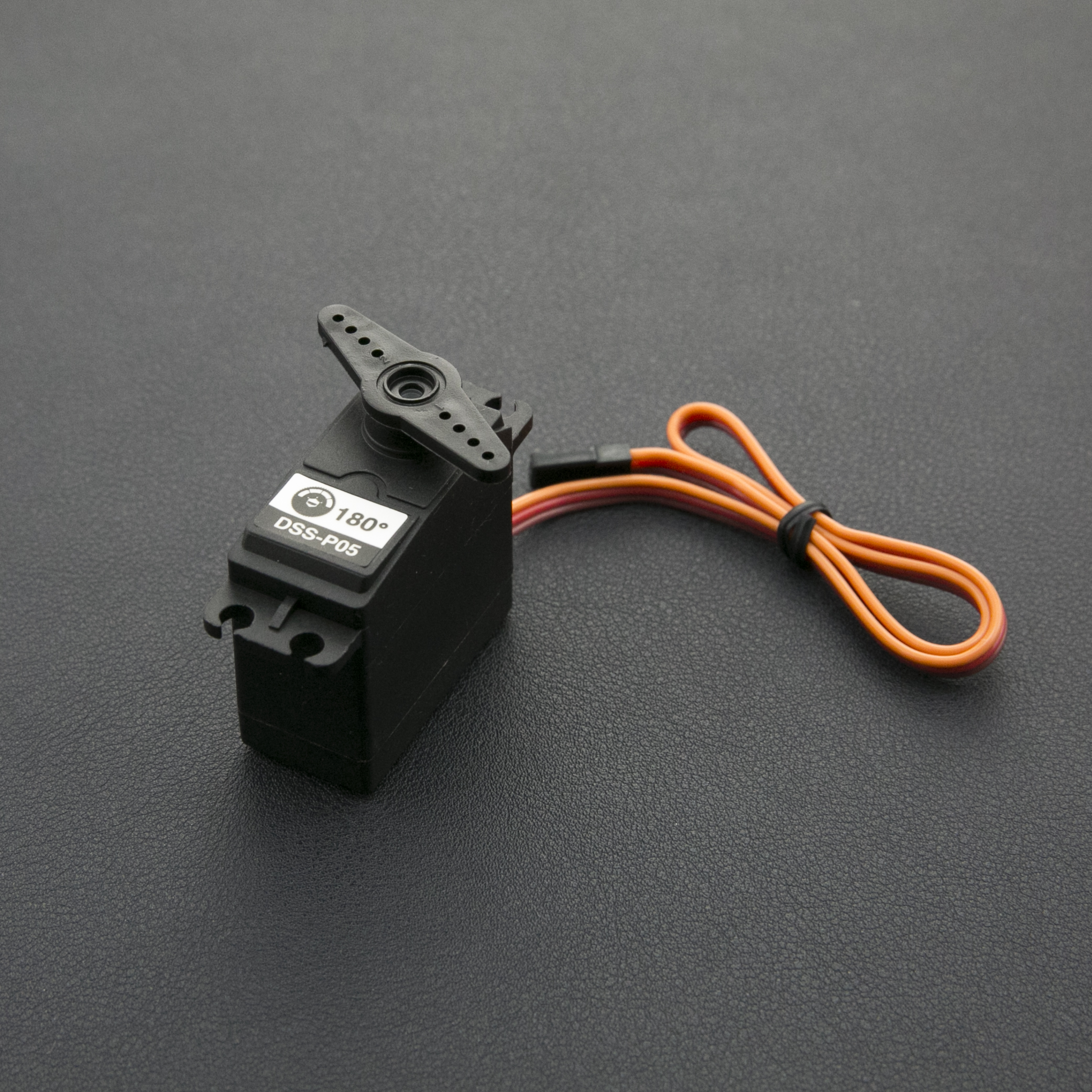
DSS-P05舵機(jī)是DFRobot出品的優(yōu)質(zhì)舵機(jī),具有控制精度高、響應(yīng)速度快等優(yōu)點(diǎn)。經(jīng)常被用在多足機(jī)器人、機(jī)械臂和監(jiān)控云臺等產(chǎn)品上。舵機(jī)采用金屬齒輪和雙軸承結(jié)構(gòu),耐磨耐用。在一些負(fù)載大或者長期運(yùn)作的項(xiàng)目上面,能夠充分保證項(xiàng)目的穩(wěn)定性。附帶的舵機(jī)盤和齒輪能夠讓你省去很多固定的麻煩。
另外,這款舵機(jī)搭配Arduino控制平臺后簡單易用。舵機(jī)的3P線可以直插在arduino IO擴(kuò)展板上。Arduino自帶的servo庫能夠幫你輕松驅(qū)動這款舵機(jī)。
注意:DSS-P05舵機(jī)已經(jīng)代替了舊版的DF05BB
技術(shù)規(guī)格- 工作電壓:4.8-6.0V
- 扭矩大小:3.5kg*cm(4.8V)/4.5kg*cm(6.0V)
- 無負(fù)載速度:0. 17秒/60度(4.8V)/0.4秒/60度(6.0V)
- 使用溫度:0-60攝氏度
- 死區(qū)設(shè)定:20微秒
- 尺寸:40.2x20.2x43.2mm
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報(bào)投訴
-
嵌入式主板
+關(guān)注
關(guān)注
7文章
6107瀏覽量
37073 -
DFRobot
+關(guān)注
關(guān)注
4文章
1164瀏覽量
12403
發(fā)布評論請先 登錄
相關(guān)推薦
熱點(diǎn)推薦
機(jī)器人調(diào)試舵機(jī)復(fù)位
機(jī)器人調(diào)試的上位機(jī)中,舵機(jī)復(fù)位時(shí)如何讓它可以由用戶自動選擇舵機(jī)復(fù)位值?
發(fā)表于 07-17 08:41
機(jī)器人舵機(jī)的作用
機(jī)器人舵機(jī)的作用就是舵機(jī)的工作原理,舵機(jī)(英文叫Servo) 舵機(jī)主要是由外殼、電路板、無核心馬達(dá)、齒輪與位置檢測器所構(gòu)成。
發(fā)表于 08-22 23:25
什么是龍人四足機(jī)器人?
龍人四足機(jī)器人是一種仿生機(jī)器人,由Openduino控制板控制,有四條腿,每條腿兩個(gè)自由度,由兩個(gè)舵機(jī)驅(qū)動,能實(shí)現(xiàn)兩種步態(tài)行走。配有三個(gè)超聲波,實(shí)現(xiàn)大角度智能避障。標(biāo)準(zhǔn)演示程序有5個(gè)可
發(fā)表于 03-24 16:17
DIY機(jī)器人舵機(jī)的五種類型分享
舵機(jī)分類:1)航模舵機(jī)航模用的舵機(jī),也包括車模,船模等模型,舵機(jī)外殼不適用機(jī)器人。2)模擬舵機(jī)內(nèi)
發(fā)表于 09-19 16:18
用Arduino調(diào)試Rapiro機(jī)器人
要注意,舵機(jī)上電后是不能強(qiáng)行用外力扭動的,不然舵機(jī)必壞! 附件中有英文版的組裝圖。 機(jī)器人組裝完后,開始調(diào)試打開電腦的Arduino IDE軟件(我不專門介紹安裝了,自己度娘),用mi
發(fā)表于 08-10 20:19
機(jī)器人舵機(jī)調(diào)試系統(tǒng)
機(jī)器人舵機(jī)調(diào)試系統(tǒng),文章目錄什么是舵機(jī)?伺服控制硬件連接舵機(jī)規(guī)格SG90MG90SMG996R總結(jié)什么是舵機(jī)?
發(fā)表于 07-12 08:43
【開發(fā)教程5】人形街舞機(jī)器人-舵機(jī)的基本控制
74HC244 來增加輸出電流。另外,機(jī)器人的頭部舵機(jī)的信號線是通過 P27 與 74HC244 相連間接控制的。圖 23軟件設(shè)計(jì)本次我們是通過定時(shí)器 T0 控制 IO 口輸出高低電平的時(shí)間來輸出 PWM。首先
發(fā)表于 05-13 16:00
【開發(fā)教程8】瘋殼·人形街舞機(jī)器人-多個(gè)舵機(jī)不同速率轉(zhuǎn)動
多自由度人形雙足舞蹈機(jī)器人——瘋殼·機(jī)器人開發(fā)系列多個(gè)舵機(jī)不同速率轉(zhuǎn)動 1相關(guān)簡介 本章將介紹兩個(gè)舵機(jī)的不同速率轉(zhuǎn)動原理以及代碼實(shí)現(xiàn)
發(fā)表于 07-25 11:39
【教程5】人形街舞機(jī)器人-舵機(jī)的基本控制
74HC244 來增加輸出電流。另外,機(jī)器人的頭部舵機(jī)的信號線是通過 P27 與 74HC244 相連間接控制的。圖 23軟件設(shè)計(jì)本次我們是通過定時(shí)器 T0 控制 IO 口輸出高低電平的時(shí)間來輸出 PWM。首先
發(fā)表于 08-16 11:43
【教程8】人形街舞機(jī)器人-多個(gè)舵機(jī)不同速率轉(zhuǎn)動
多自由度人形雙足舞蹈機(jī)器人——瘋殼·機(jī)器人開發(fā)系列多個(gè)舵機(jī)不同速率轉(zhuǎn)動 1相關(guān)簡介 本章將介紹兩個(gè)舵機(jī)的不同速率轉(zhuǎn)動原理以及代碼實(shí)現(xiàn),多個(gè)
發(fā)表于 08-18 17:25
dfrobotHerkuleX DRS-0101 機(jī)器人專用舵機(jī)介紹
韓國著名的Dongbu機(jī)器人公司出品的HerkuleX DRS-0101 機(jī)器人專用舵機(jī)可能是目前市場上最好的一款機(jī)器人




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論