 PID線路跟隨器Atmega328P的制作
PID線路跟隨器Atmega328P的制作

第1步:
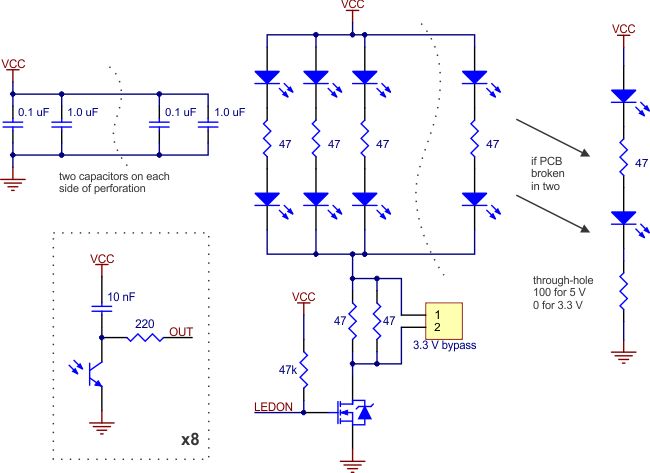
感謝 Pololu 制造了這款出色的傳感器。
該模塊是方便的載體,可容納八對IR發射器和接收器(光電晶體管),它們以0.375英寸(9.525毫米)的間隔均勻分布。要使用傳感器,必須首先對輸出節點充電(對通過在其OUT引腳上施加電壓來讀取反射率,然后可以通過提取外部提供的電壓并定時確定輸出電壓由于集成光電晶體管而衰減所需的時間,從而縮短反射時間,這表明反射更大。這種測量方法具有幾項優勢,特別是與QTR-8RC模塊關閉LED電源的能力結合使用時:
沒有模數轉換器(
分壓器模擬輸出具有更高的靈敏度。
大多數微控制器可以并行讀取多個傳感器。
規格
尺寸:2.95“ x 0.5” x 0.125“(未安裝排針)
工作電壓:3.3-5.0 V
電源電流:100 mA
輸出格式:8個數字I/O兼容信號,可以將其讀取為定時高脈沖
最佳感應距離:0.125英寸(3毫米)建議的最大感應距離:0.375英寸(9.5毫米) )
不帶插頭的重量:0.11盎司(3.09克)
將QTR-8RC輸出連接到數字I/O線
QTR-8RC模塊具有八個相同的傳感器輸出,與Parallax QTI一樣,需要一條數字I/O線,該數字I/O線能夠將輸出線驅動為高電平,然后測量時間輸出電壓衰減。讀取傳感器的典型順序是:
打開IR LED(可選)。
將I/O線設置為輸出并將其驅動為高電平。
至少等待10μs,以使傳感器輸出上升。
使I/O線成為輸入(高阻抗)。
通過等待I/O線變低來測量電壓衰減的時間。
關閉IR LED(可選)。
這些步驟通常可以在多條I/O線上并行執行。
強大的反射率,衰減時間可低至幾十微秒;在沒有反射的情況下,衰減時間可能長達幾毫秒。衰減的確切時間取決于您的微控制器的I/O線特性。在典型情況下(即在不嘗試測量低反射情況下的細微差別時),可以在1 ms內獲得有意義的結果,從而允許對所有8個傳感器進行高達1 kHz的采樣。如果低頻采樣就足夠了,則可以通過關閉LED來節省大量功率。例如,如果可接受100 Hz的采樣率,則LED可以在90%的時間內關閉,從而將平均電流消耗從100 mA降低到10 mA。
步驟2:微控制器( Brain)Atmega328P
感謝 Atmel Corporation 制造這種超棒的微控制器AKA Atmega328 。
ATmega328P的關鍵參數
參數值
Flash(KB):32 KB
引腳數:32
最大。工作頻率(MHz):20 MHz
CPU:8位AVR
最大I/O引腳:23
Ext中斷:24
SPI:2
TWI(I2C):1
UART:1
ADC通道:8
ADC分辨率(位) :10
SRAM(KB):2
EEPROM(字節):1024
I/O供電等級:1.8至5.5
工作電壓(Vcc):1.8至5.5
計時器:3
有關詳細信息,請查閱Atmega328P的數據表。
在此我出于某些原因使用Atmega328P的項目
便宜
具有足夠的RAM進行計算
該項目的I/O引腳足夠《/li》
Atmega328P用于Arduino 。..。您可能會在圖片和視頻中注意到一個Arduino Uno,但夜間我正在使用Arduino IDE或任何Arduino 。.我僅使用硬件作為接口板。我已經擦除了引導加載程序,并使用 USB ASP 對該芯片進行了編程。
用于對該芯片進行編程我已經使用了 Atmel Studio 6
所有源代碼都在 GitHub中下載并檢查 test.c 文件。
要編譯此軟件包,您必須下載并安裝 POLOLU AVR庫設置 。檢查附件。..
我還正在上傳 Atmega328P開發板原理圖和板文件 。..您可以自己制造。..
第3步:電動機和電動機驅動器
我已經使用了 350RPM 12V BO型減速直流電機作為執行器。
作為電機驅動器,我使用了L293D H橋IC。
我將為其附上原理圖和電路板文件。
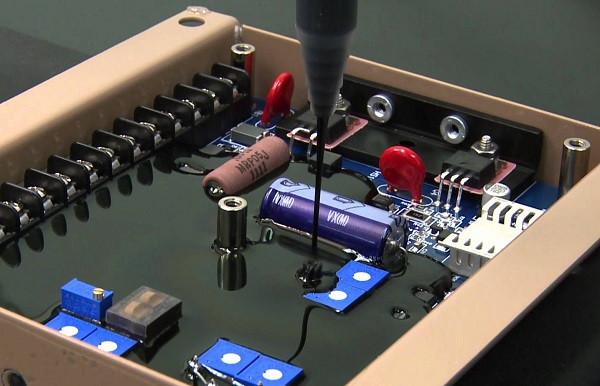
第4步:機箱和雜項
機器人由Ply制成厚度為6毫米的木頭。
-
跟隨器
+關注
關注
1文章
86瀏覽量
30559 -
PID
+關注
關注
38文章
1499瀏覽量
91154 -
Atmega328P
+關注
關注
4文章
56瀏覽量
17722
發布評論請先 登錄
Atmel ATmega644P/V 8位AVR微控制器深度剖析
變頻器內置PID控制參數的含義

變頻器PID參數設置步驟

ATmega329P/3290P:高性能低功耗8位微控制器的卓越之選
CDC328A:高性能時鐘驅動器的技術剖析
變頻器pid怎么啟用

STNRG328S 數字控制器:高效電源轉換的理想選擇
PID控制的算法
C語言實現PID算法介紹
怎樣理解變頻器內置PID控制參數的含義
UWB技術如何解決復雜場景下AGV的精準跟隨難題?

Aerodiode高帶寬激光鎖定PID控制器



 工商網監
工商網監
評論