 如何使用電位計控制步進電機的位置
如何使用電位計控制步進電機的位置

第1步:收集零件!
您將需要:
一個Arduino板:-推薦使用Arduino UNO,它是初學者友好的板。
步進電機驅動程序:-無論是L298N,AF電動機屏蔽罩,A4988還是DRV8825(建議使用后兩個驅動器,因為可以調節這些驅動器的電流輸出。)。
很多MM跳線
一些MF跳線
12伏直流電源
第2步:Arduino代碼

在進行任何布線連接之前,首先,將代碼上傳到Arduino開發板。提供了用于A4988驅動程序的庫。將其復制到桌面上,打開Arduino IDE,并在上載代碼之前通過‘sketch’選項來包括ZIP庫。
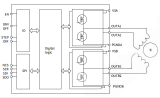
步驟3:進行接線。
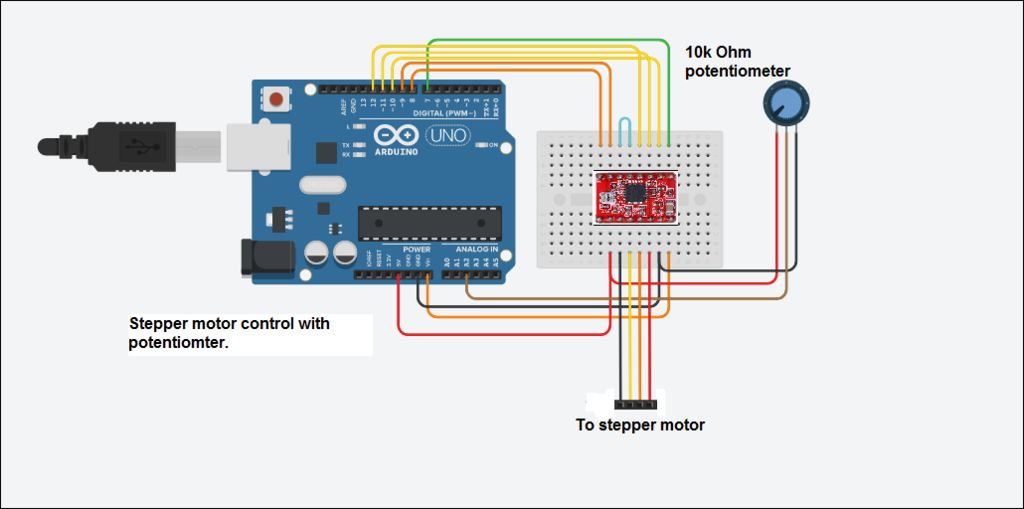
按照電路原理圖并使用跳線連接所有組件。請勿將12V直流電源連接和電動機的輸出連接與5V電源或任何數字輸入混用,否則這將是您的微控制器和電動機驅動器在這個世界上的最后一天! h2》第4步:加電!
一旦完成所有接線并檢查,請通過將Arduino微控制器板連接到直流電源來加電設置(最好是9到12伏的電壓范圍),并使電動機運轉!
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
步進電機
+關注
關注
153文章
3249瀏覽量
152408 -
電位計
+關注
關注
0文章
255瀏覽量
17915
發布評論請先 登錄
相關推薦
熱點推薦
步進電機發熱問題及對策
?步進電機作為一種將電脈沖信號轉換為角位移或線位移的開環控制元件,在自動化設備、3D打印機、數控機床等領域應用廣泛。然而在實際使用過程中,電機發熱問題始終困擾著工程師和技術人員。過高的
?DRV8821 雙路步進電機控制器與驅動器技術文檔總結
該DRV8821提供雙微步進步進電機控制器/驅動器 打印機、掃描儀和其他辦公自動化設備應用的解決方案。
兩個獨立的步進電機驅動電路包括
?DRV8711 步進電機控制器技術文檔總結
DRV8711器件是一個步進電機控制器,它使用外部 N 溝道 MOSFET 驅動一個雙極步進電機或兩個有刷直流


基于MT6835磁編碼器IC的步進電機全閉環伺服控制策略
基于MT6835磁編碼器IC的步進電機全閉環伺服控制策略,通過引入高精度位置反饋和先進控制算法,實現步進
高精度磁位置反饋:麥歌恩MT6835賦能閉環步進電機性能躍升
微電子推出的MT6835磁編碼器芯片,正在為這一領域帶來革命性的改變——通過高精度磁位置反饋技術,實現閉環步進電機控制的性能躍升。
單片機怎么控制步進電機的
步進電機作為一種將電脈沖信號轉化為角位移的執行機構,其運轉依賴于脈沖信號的控制,而單片機作為控制核心,通過輸出特定的脈沖信號和方向信號,實現對步進
如何應對步進電機的各種干攏問題
步進電機的干擾問題是一個復雜且常見的話題,這些干擾可能來源于步進電機本身,也可能來自外部環境。為了有效地應對這些干擾,可以從以下幾個方面進行考慮和解決。 一、


步進電機的基本原理和硬件設計
步進電機因其精準的位置控制和易于驅動的特性,廣泛應用于打印機、CNC機床、機器人等領域。無論您是初學者還是有一定經驗的工程師,這個系列都將為您提供有價值的知識和實踐指導。




 工商網監
工商網監
評論