 自主漫游車的制作
自主漫游車的制作

步驟1:準備
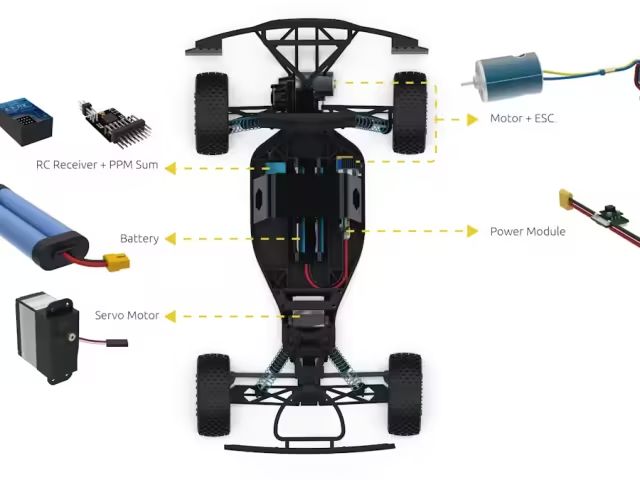
步驟2:所需的零件
執行此項目所需的零件清單
1。樹莓派(B +,2,3)
2。 wifi加密狗(如果使用Rpi B +。其他型號帶有內置的wifi模塊)
3。 Arduino uno
4.L293D或其他類似的電機驅動器
5.webcam(如果需要)
6.wifi路由器
7顯示器,鍵盤,鼠標(僅用于第一次安裝Raspberry pi)
8。機箱,用于制造流動站的電動機
9.Lipo電池11.1v,充電器
10。內置電池消除器的電池消除器11.1v至5vdc或ESC
第3步:主要概念
我計劃以兩種可操作的方式做到這一點(簡單高級)。這個可以指導的步驟解釋了建立一個可以通過wifi網絡進行控制的標準漫游車的步驟。其中較難的一項將涵蓋ROS,圖像處理和導航
主要思想:
使用ssh和vnc服務器,我們將連接計算機與內置樹莓派并將控件發送到電動機
步驟4:所需軟件
1.raspbian操作系統(按照以下說明為樹莓派閃存存儲卡https://www.raspberrypi.org/documentation/installa.。.)
2.ssh客戶端:用于Windows (putty http://www.chiark.greenend.org.uk/~sgtatham/putty/。..)for ubuntu(sudo apt install openssh-client)
3.install arduino for raspberry pi(
4.xtightvncviewer:對于Windows(http://www.tightvnc.com/download.php)
有關詳細信息,請參見下一張幻燈片
步驟5:準備Raspberry Pi

1。遵循以下步驟(僅用于簡單步驟)來刷新存儲卡并安裝raspbian操作系統
將RPI連接到顯示器,鍵盤和鼠標(僅用于開始)
打開終端和
2。運行sudo apt-get update和sudo apt-get update(僅限第一次)
3。安裝vncserver(sudo apt-get installightentvncserver)
4。安裝Arduino ide(sudo apt-get install arduino)
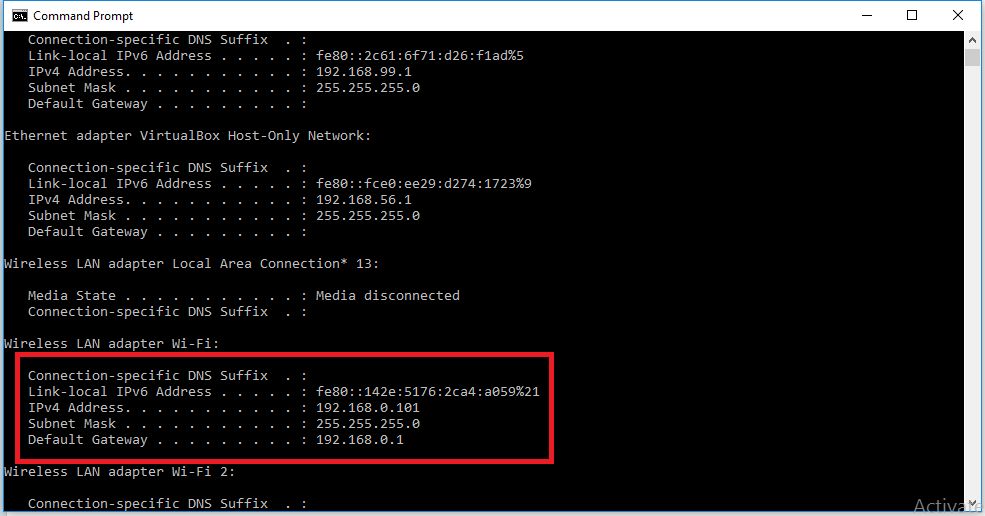
出于遠程操作樹莓派的目的,我們需要設置具有恒定IP地址的WiFi連接。您需要一個wifi路由器(或hotspot)將pi連接到它(wifi加密狗或內置wifi模塊)
在終端中使用此cmd打開dhcpcd.conf
sudo nano/etc/dhcpcd.conf
輸入以下
接口wlan0
靜態ip_address = 192.168.0.130/24
靜態路由器= 192.168。 0.1
(請注意,系統的IP地址和靜態路由器將更改。在設置此地址之前,請檢查路由器網關)
在此圖片中,您可以看到默認網關和我的ip 192.168 .0.101 。..將最后一個101更改為130
立即重新啟動樹莓派
sudo shutdown -h現在
再次打開它
現在您的wifi應該會自動連接(前提是您已經使用密碼手動將其連接了一次)
步驟6:為Windows準備系統
1.install putty http://www.chiark.greenend.org.uk/~sgtatham/putty/。..下載適用于Windows 32或64位的正確版本并安裝。.(簡單安裝僅限:))
2.install xtign tvncviewer http://www.tightvnc.com/download.php
就是這樣。.將相同的wifi網絡
連接到ubuntu
1。安裝xtightvncviewer apt-get安裝vncviewer
連接到同一個wifi網絡,我們很高興
步驟7:Ssh連接





1。打開樹莓派
2。打開膩子
3。鍵入我們之前設置的樹莓派的IP地址并連接
4。輸入用戶名樹莓派的密碼和密碼(默認用戶名:pi PASS:樹莓派)
5。您應該看到如下圖所示的終端窗口
6。輸入此命令以啟動ssh服務器
vncserver:1 -geometry 720x640 -depth 24
注意:第一次,系統會要求您設置ssh客戶端的密碼
Windows
打開xtightvncviewer(這也會要求您設置密碼)
在對話框中,輸入RPI ip地址,后跟:1
mine is 192.168.0.130:1
我的IP,然后加上:1
在對話框中輸入密碼
現在您應該會看到RPI屏幕。如果沒有,請檢查您與wifi的連接并檢查RPI ip地址
步驟8:ARDUINO
從計算機或RPI
就這樣
第9步:硬件連接
觀看我的視頻,了解如何建造這輛漫游車
步驟10:最后一步

我們已經完成了所有艱苦的工作。現在,如視頻所示。只需打開我們的RPI監視器(xtightvncviewer),打開arduino ide并轉到串行連接窗口,然后輸入命令
f-轉發
b-反向單詞
r& l-左右轉彎
s-停止
第11步:結論
我們剛剛完成了第一輛遙控漫游車只使用一些開源軟件。在我的下一個指導中,我將教您如何使用ROS和圖像處理技術來進行自主流動站,而無需更改流動站中的任何內容。
責任編輯:wv
-
路由器
+關注
關注
22文章
3908瀏覽量
119587 -
Arduino
+關注
關注
190文章
6526瀏覽量
196935 -
樹莓派
+關注
關注
122文章
2078瀏覽量
110473
發布評論請先 登錄
華陽通用AIBOX車載AI計算平臺獲得國內頭部自主品牌車企項目定點
中車永濟電機公司抽水蓄能核心裝置實現自主化突破
中國中車智能化砂芯儲運系統上線運行
車機交互測試:智能座艙體驗的“質檢官”與“優化師”

導遠科技車規級MEMS IMU芯片獲自主可控認定

自主生產:制造業的未來
醫療無線漫游何解?用10年時間給出“零漫游”的答案
兩輪自平衡電動車及其電機控制器設計
知行科技獲某頭部自主品牌商業物流車平臺化定點
基于ESP32C3的智能小車設計

不僅能跑,還能自己剎車,用樹莓派打造自主駕駛的 RC 車!

用 樹莓派 Zero 打造的智能漫游車!
中國中車風電葉片再次出海印度
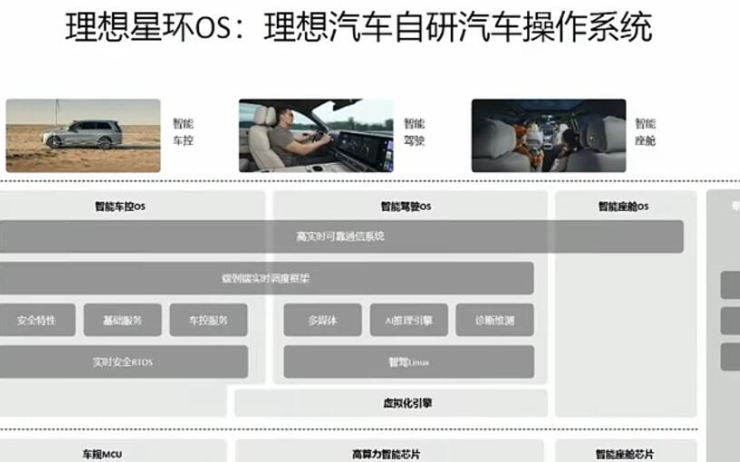
車機操作系統自主可控加速!華為、小米和理想,誰是真正的領跑者?



 工商網監
工商網監
評論