 自動機器人的制作
自動機器人的制作

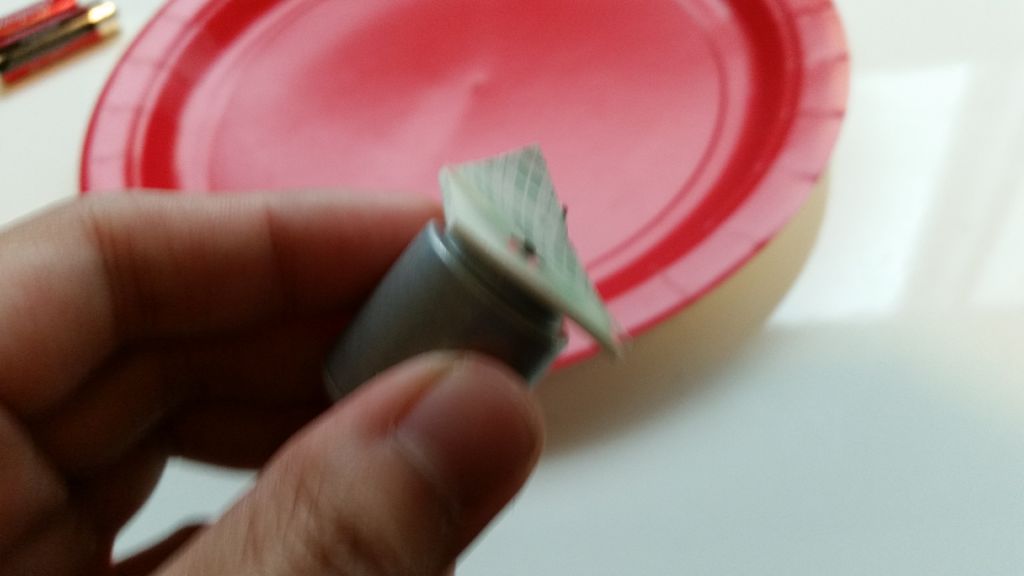
步驟1:準備


使用打孔器在安裝膠帶的中間放一個孔。切割約1英寸的收縮管。將膠帶,面包板,光電池,電池座,晶體管,電機和電子管放入袋中。用紙盤分發袋子。抓住大頭釘和電池供以后使用。
步驟2:連接電機
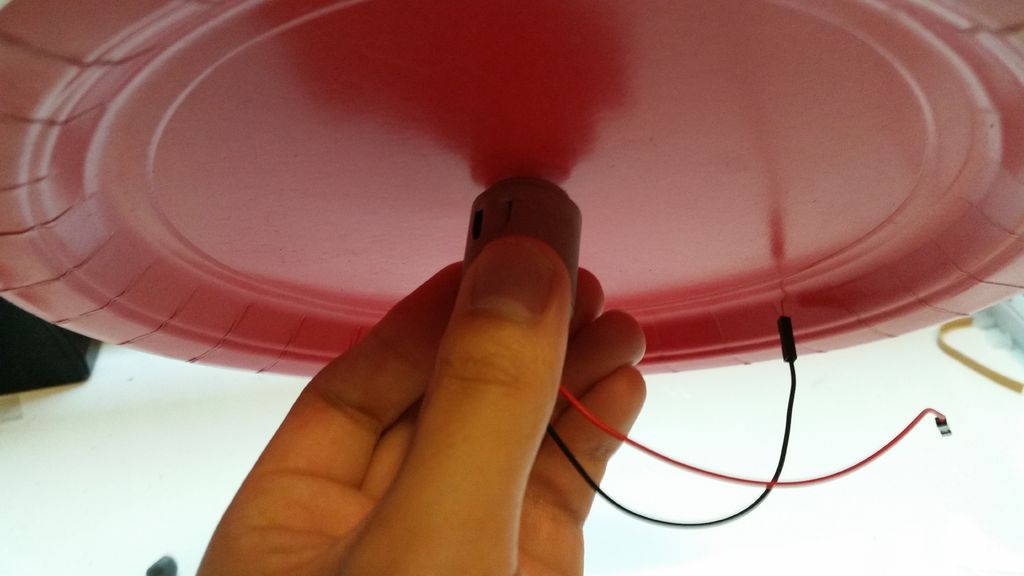
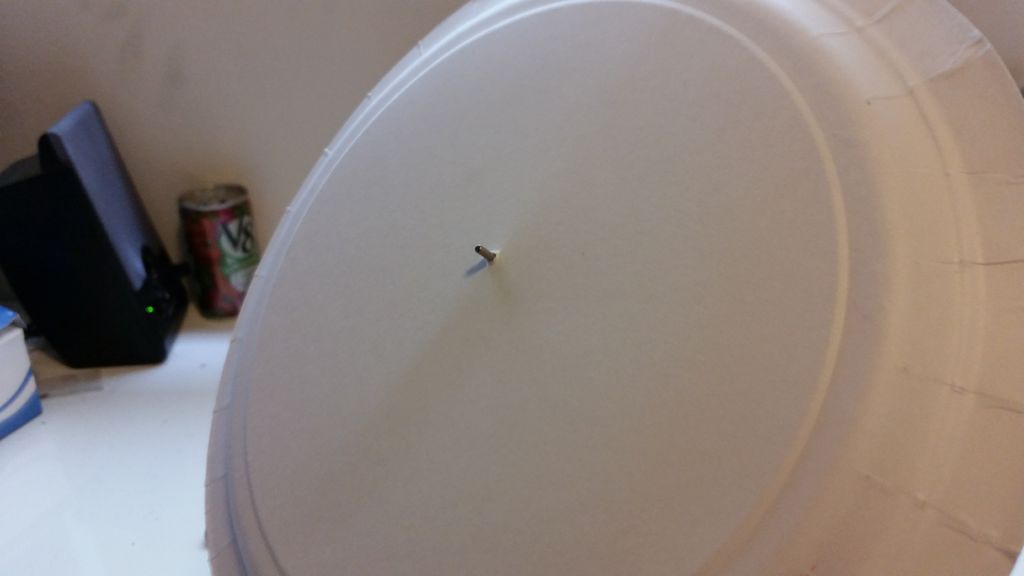




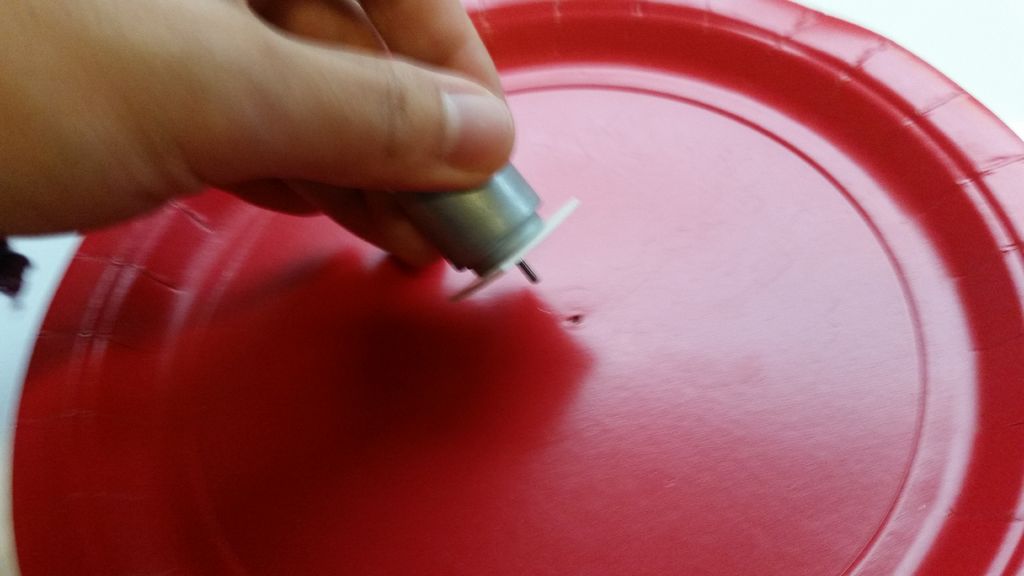
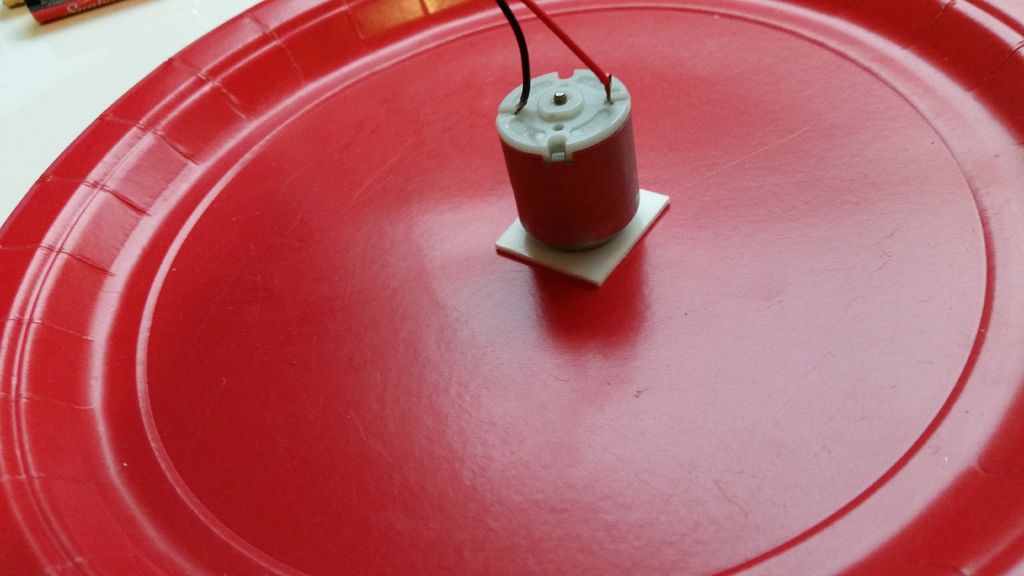
將電機軸推入靠近的紙盤盤子的中心。從紙帶的一側剝離紙張,然后將膠帶粘在電機上。確保電機軸完全穿過孔。剝掉另一張紙,然后將馬達粘在盤子上。
步驟3:開始面包板
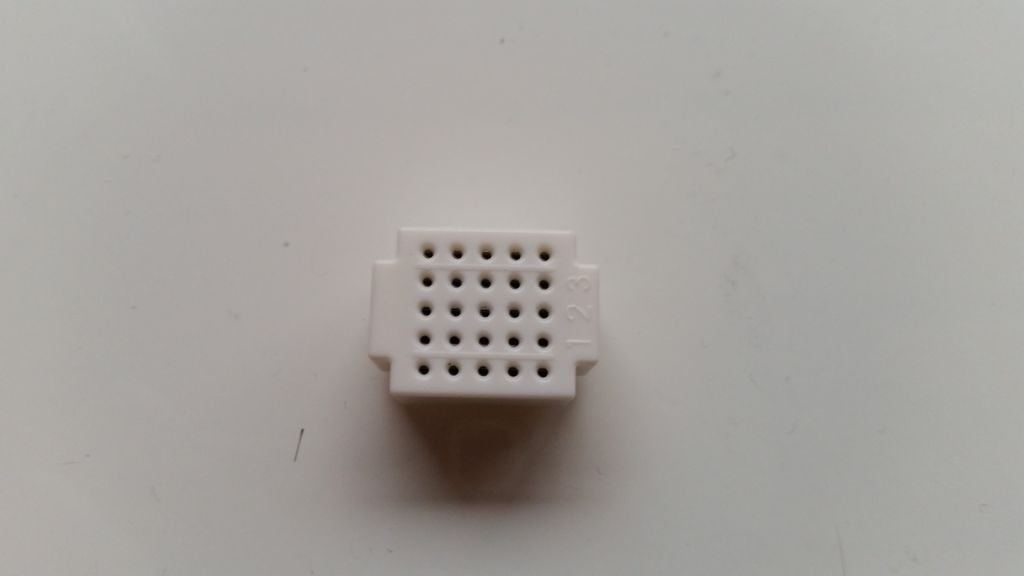
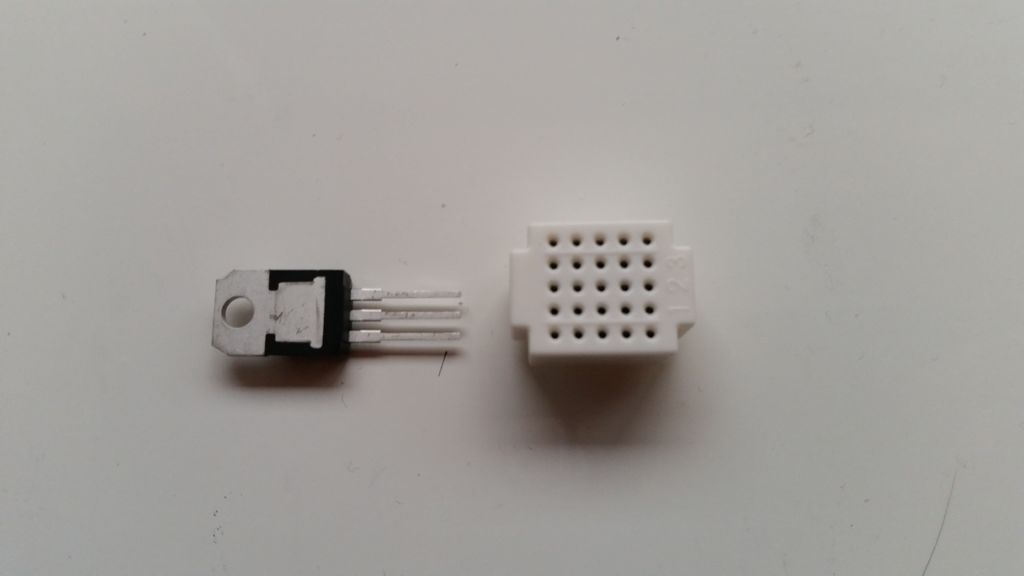
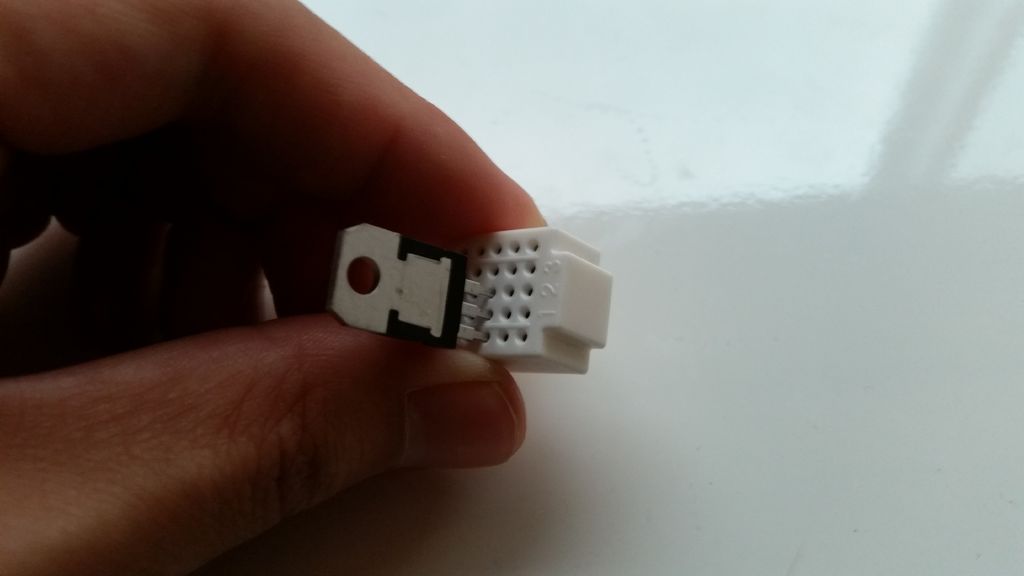
確保每個人都以相同的方式定向面包板。面包板有兩面“凸起”。這些方面將是左右兩邊。晶體管具有黑色側和金屬側。將金屬面朝右的晶體管放入面包板的中間列。三條腿應位于面包板的三個底行。
步驟4:光電池
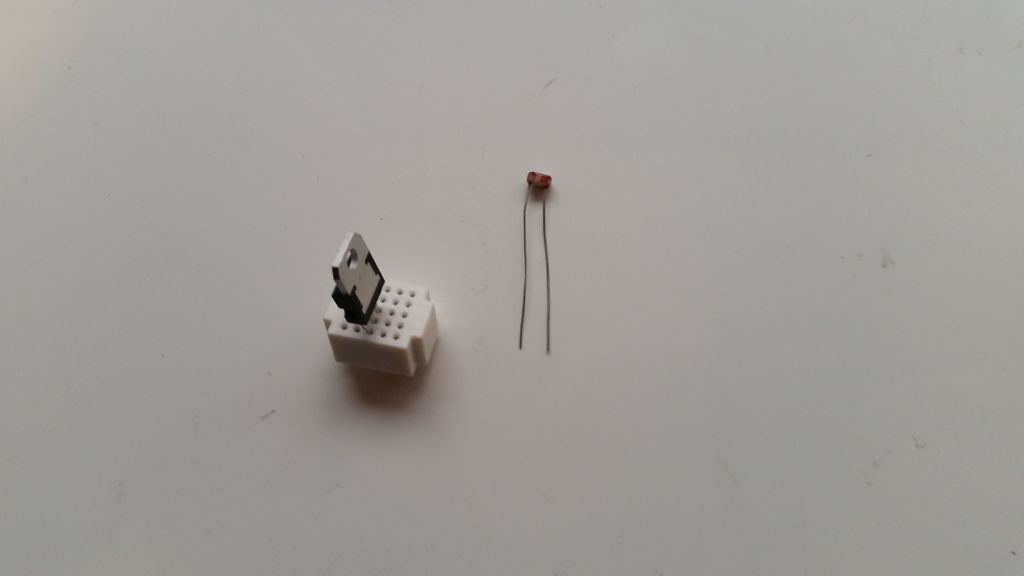
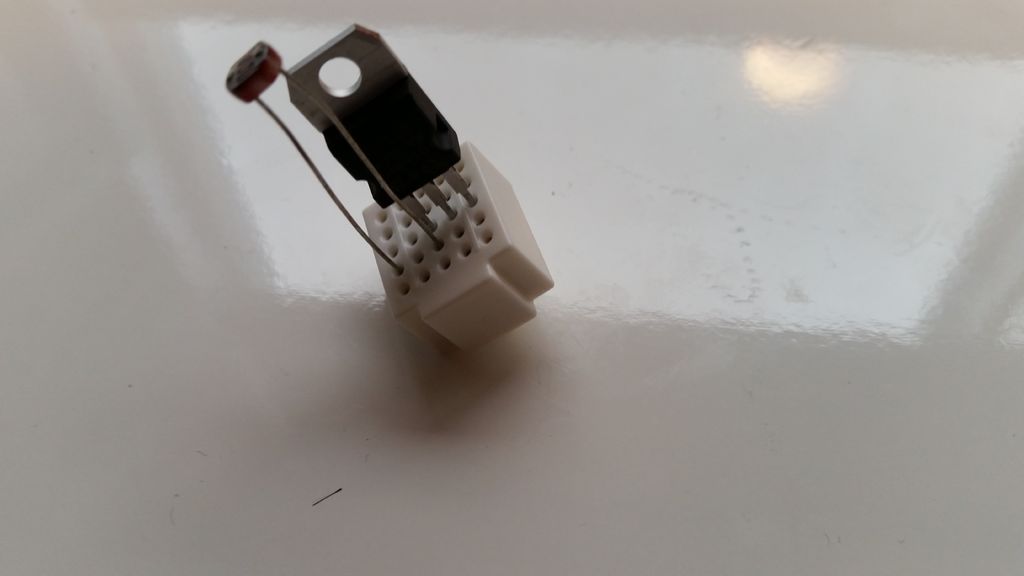
光電管進入晶體管左側的列。它的腿應位于頂行和頂行的第三行。它沒有極性。
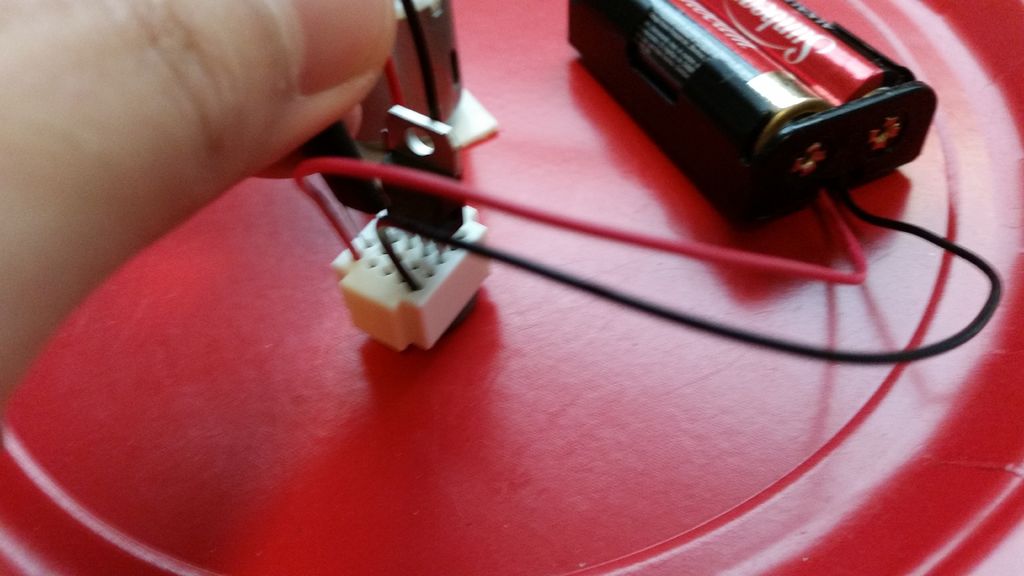
步驟5:電機



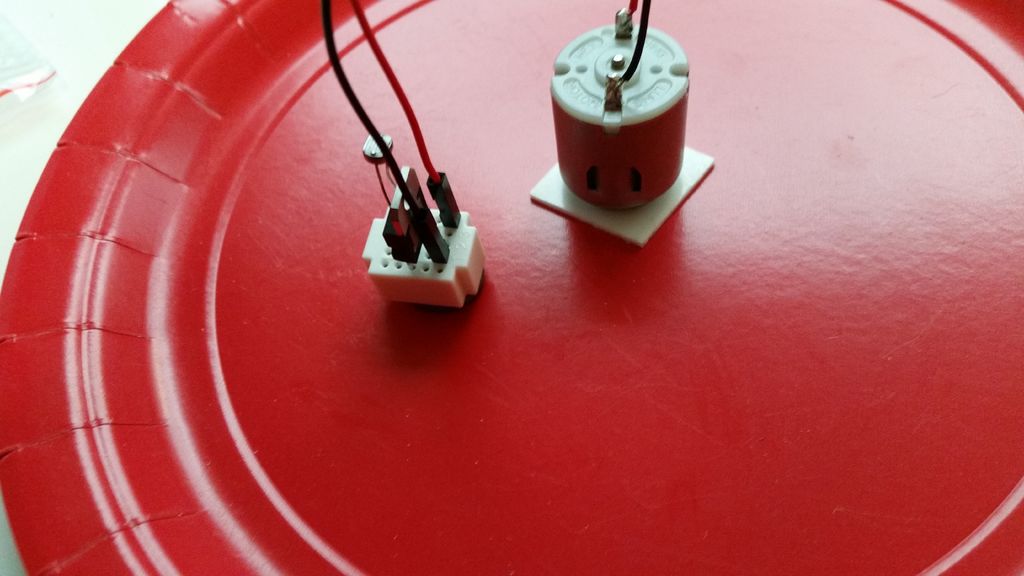
電機的紅線進入面包板的右上角孔。電機的黑線進入最右邊的列,從頂部開始第四排。使用一團粘性粘性將面包板連接到印版上。
步驟6:電池
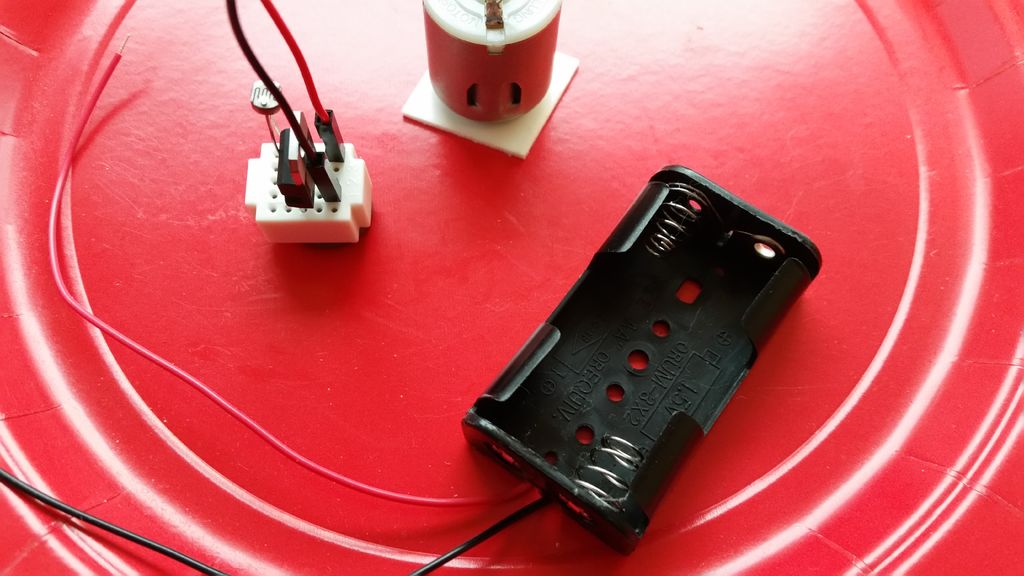



電池座的紅線進入面包板的左上角孔,黑線進入面包板的左下角。用一小塊粘性粘性將電池座固定在印版上。
步驟7:確保其正常工作



將電池放入電池座,電路板應開始旋轉。將管放在光電管上,板應停止。調整管的高度以調整光電管的靈敏度。拔下其中一根電池線以關閉機器人,將其重新插上以打開。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31097瀏覽量
222361
發布評論請先 登錄
相關推薦
熱點推薦
「RT-Thread廿周年 | 工業與機器人分論壇:與智元機器人等一線力量,共探智能體工業落地
當具身智能的浪潮席卷而來,工業與機器人領域正站在從“自動機器”邁向“智能體”的關鍵拐點。這一轉變不僅需要算法的革新,更對底層嵌入式系統的實時性、可靠性及開放協同提出了前所未有的要求。2026年1月

Infineon移動機器人電機控制方案深度解析
Infineon移動機器人電機控制方案深度解析 在當今科技飛速發展的時代,移動機器人在物流、生產、服務等眾多領域的應用日益廣泛。電機控制作為移動機器人的核心技術之一,其性能直接影響著
移動機器人“芯”引擎爆發,禾賽、海思新品逆襲
GGII預計,2025年中國移動機器人銷量有望達到12.6萬臺,總量同比增長約12.7%。這也催生了對上游激光雷達的需求。本文將重點介紹智能物流體系中移動機器人的雷達性能要求和新品。

探索RISC-V在機器人領域的潛力
Pro則運行控制節點,通過Wi-Fi網絡接收Gazebo發布的傳感器信息(如激光雷達數據),并發布控制指令(速度指令)來驅動機器人模型移動和避障。
? 體驗: MUSE Pi Pro的K1 CPU在處理
發表于 12-03 14:40
小蘿卜機器人的故事
經過我的申請,
馬老師發放了,
小蘿卜機器人的,
開發權限,
原來的小蘿卜公司,
因為經營不善倒閉,
作為科研產品,
幾個技術對此惋惜,
自掏腰包,
要讓小蘿卜機器人,
再生,
每次聽到小蘿卜說
發表于 10-23 05:24
移動機器人技術的發展歷程
本白皮書聚焦于移動機器人領域的進展與挑戰,重點探討三個核心主題:機器人運動控制、復雜環境中的感知與導航,以及在適應新任務時的模塊化與靈活性。此外,文中還重點介紹了機器人系統從簡單的固定機械臂到復雜人形
恩智浦自主移動機器人設計要點
長期以來,自動化機器人一直被視為科幻小說中的概念,而如今這一技術已成為現實,并正在大規模部署。在機器人技術領域,自主移動機器人 (AMR) 是發展最快的創新技術之一。

機器人競技幕后:磁傳感器芯片激活 “精準感知力”
機器人獲得更接近人類的觸覺反饋。
賽事首席技術官王博士表示:“當機器人開始‘感知’而非‘計算’環境時,真正的智能化競技時代才算到來。” 未來,磁傳感器技術的持續進化,必將不斷改寫人形機器人運動的競爭規則與技術標準,推
發表于 08-26 10:02
工業機器人的特點
的基礎,也是三者的實現終端,智能制造裝備產業包括高檔數控機床、工業機器人、自動化成套生產線、精密儀器儀表、智能傳感器、汽車自動化焊接線、柔性自動化生產線、智能農機、3D 打印機等領域。
發表于 07-26 11:22
瑞芯微 RK3568/3588:為移動機器人注入智慧動力引擎
移動機器人,正從科幻想象快步走入現實生活。它們依據應用場景與功能,主要分為三大類: 工業移動機器人: 如AGV(自動導引車)、AMR(自主移動機器人),專注于物流搬運與產線協同,提升效
輪式移動機器人電機驅動系統的研究與開發
【摘 要】以嵌入式運動控制體系為基礎,以移動機器人為研究對象,結合三輪結構輪式移動機器人,對二輪差速驅動轉向自主移動機器人運動學和動力學空間模型進行了分析和計算,研究和設計了自主移動機器人
發表于 06-11 14:30
工業機器人與協作機器人概念不同
在自動化生產的浪潮中,工業機器人與協作機器人逐漸成為企業提升效率、優化產能的得力助手。但它們并非同一概念,在功能、設計與應用場景上有著顯著差異。北京沃華慧通測控有限公司憑借深厚的技術沉淀,為不同需求的企業提供適配的

盤點#機器人開發平臺
地瓜機器人RDK X5開發套件地瓜機器人RDK X5開發套件產品介紹 旭日5芯片10TOPs算力-電子發燒友網機器人開發套件 Kria KR260機器人開發套件 Kria KR260-
發表于 05-13 15:02
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速開發
發表于 04-30 01:05
安森美圖像傳感器在機器人領域的應用
目前,市面上的機器人主要分為兩類:固定式機器人與移動式機器人。固定式機器人固定于某個位置。而移動式機器人,包括自主移



 工商網監
工商網監
評論